También podría gustarte
- Problemas resueltos de electromagnetismo. Volumen I: ElectrostáticaDe EverandProblemas resueltos de electromagnetismo. Volumen I: ElectrostáticaAún no hay calificaciones
- Análisis VectorialDocumento32 páginasAnálisis VectorialMARCO ANTONIO FLORES ROBLESAún no hay calificaciones
- Capitulo #2 Movimiento en Dos DimensionesDocumento17 páginasCapitulo #2 Movimiento en Dos DimensionesMaria Jose PerezAún no hay calificaciones
- Cuadernillo TSF1Documento67 páginasCuadernillo TSF1Sergio KekosAún no hay calificaciones
- Magnitudes Escalares y VectorialesDocumento16 páginasMagnitudes Escalares y VectorialesteffyaguilarAún no hay calificaciones
- Act de Aprendizaje FisicaDocumento9 páginasAct de Aprendizaje FisicaJuan CassianiAún no hay calificaciones
- Equilibrio vectorial: fuerzas en equilibrioDocumento3 páginasEquilibrio vectorial: fuerzas en equilibrioIsrael AlvarezAún no hay calificaciones
- Vectorees (1) (Autoguardado)Documento4 páginasVectorees (1) (Autoguardado)Jeff MaLdonadoAún no hay calificaciones
- Vectores - 1 CorteDocumento10 páginasVectores - 1 Cortemaria patricia torregrosa roldanAún no hay calificaciones
- Actividad 0 CalculoDocumento15 páginasActividad 0 CalculoAnel Ximena De La Cruz AlvarezAún no hay calificaciones
- TRABAJO DE FISICA de Christian TerminadoDocumento19 páginasTRABAJO DE FISICA de Christian Terminadochristian montillaAún no hay calificaciones
- Temario FisicaDocumento27 páginasTemario FisicaAntonio YumanAún no hay calificaciones
- VectoresDocumento16 páginasVectoresAbel Rodriguez SolanoAún no hay calificaciones
- Cantidades Vectoriales y EscalaresDocumento19 páginasCantidades Vectoriales y EscalaresNOYOLA GÓMEZ EMILIO DAMIANAún no hay calificaciones
- 1.2 Algebra Vectorial y Su Geometría 1Documento13 páginas1.2 Algebra Vectorial y Su Geometría 1Efren Alamillo Mata67% (9)
- Actividad 1 U1 - Angrisano Alcocer Antonio - Blas Reza Cesar Alejandro - Custodio Montejo Elian Alberto - Compressed (1) - CompressedDocumento85 páginasActividad 1 U1 - Angrisano Alcocer Antonio - Blas Reza Cesar Alejandro - Custodio Montejo Elian Alberto - Compressed (1) - CompressedantonioangrisanoAún no hay calificaciones
- Magnitudes Escalares y VectorialesDocumento12 páginasMagnitudes Escalares y VectorialesJuan ValdiviasAún no hay calificaciones
- 2 Suma y Resta de VectoresDocumento9 páginas2 Suma y Resta de VectoresAndres TrujilloAún no hay calificaciones
- Vector EsDocumento11 páginasVector Eslop13165Aún no hay calificaciones
- Operaciones VectorialesDocumento12 páginasOperaciones VectorialesFrancisco ZambranoAún no hay calificaciones
- Fisica I - Segunda Parte PDFDocumento37 páginasFisica I - Segunda Parte PDFlzk00mAún no hay calificaciones
- Magnitudes físicas y operaciones vectorialesDocumento6 páginasMagnitudes físicas y operaciones vectorialesDaniel GarciaAún no hay calificaciones
- Glosario 1. 1roalbDocumento51 páginasGlosario 1. 1roalbEvelyn LasluisaAún no hay calificaciones
- Guia #2 Vectores y Sus Aplicaciones 2024Documento11 páginasGuia #2 Vectores y Sus Aplicaciones 2024cpsanchezAún no hay calificaciones
- Investigar Los Siguientes PuntosDocumento5 páginasInvestigar Los Siguientes PuntosCaballero JoseAún no hay calificaciones
- 1.1 Definición de Un Vector en R2 y R3, y Su Interpretación Geométrica.Documento9 páginas1.1 Definición de Un Vector en R2 y R3, y Su Interpretación Geométrica.BeTo MartinezAún no hay calificaciones
- Trabajo de Mecanica VectorialDocumento8 páginasTrabajo de Mecanica VectorialWalter Castro SeminarioAún no hay calificaciones
- Algebra VectorialDocumento5 páginasAlgebra VectorialEduardo MorenoAún no hay calificaciones
- Lab #1 Fisica 236Documento16 páginasLab #1 Fisica 236Mrs. Alma Regina VaquizAún no hay calificaciones
- AlgebraLineal TareaU4 AriasJimenezDocumento17 páginasAlgebraLineal TareaU4 AriasJimenezDaniel CruzAún no hay calificaciones
- Vectores en FísicaDocumento35 páginasVectores en FísicaGlenn Day Terán RiverosAún no hay calificaciones
- Vectores Ied Leccion 1Documento9 páginasVectores Ied Leccion 1paisano1222Aún no hay calificaciones
- Introducción a los vectoresDocumento20 páginasIntroducción a los vectoresLuis Alejandro MedinaAún no hay calificaciones
- 1 - Presentación Clases Estructuras IsostáticasDocumento48 páginas1 - Presentación Clases Estructuras IsostáticasLILIBETH GABRIELA TAYUPANDA TAYUPANDAAún no hay calificaciones
- Vector EsDocumento19 páginasVector EsJustavoSandovalAún no hay calificaciones
- UntitledDocumento48 páginasUntitledJulio Vidal. Q.C.Aún no hay calificaciones
- Diagramas Representativos de La Dirección y Sentido de Las Fuerzas Fisica 7 BasicoDocumento6 páginasDiagramas Representativos de La Dirección y Sentido de Las Fuerzas Fisica 7 BasicoJessica Alvarez50% (2)
- Guia 4 Cantidades Vectoriales y EscalaresDocumento12 páginasGuia 4 Cantidades Vectoriales y Escalaresximena94Aún no hay calificaciones
- Propedéutico 2 1 Vectores CGDocumento13 páginasPropedéutico 2 1 Vectores CGguhAún no hay calificaciones
- Vectores en dos dimensiones: Suma, resta y producto por escalarDocumento24 páginasVectores en dos dimensiones: Suma, resta y producto por escalarAlejandra FonsecaAún no hay calificaciones
- Cómo Son Los Componentes de Un Vector (Recuperado Automáticamente)Documento10 páginasCómo Son Los Componentes de Un Vector (Recuperado Automáticamente)juan cerda jimeneszAún no hay calificaciones
- Escalares y VectorialesDocumento18 páginasEscalares y VectorialesJoel MoraoAún no hay calificaciones
- Cantidad Vectorial y EscalarDocumento17 páginasCantidad Vectorial y EscalarfelipeAún no hay calificaciones
- Cantidades FisicasDocumento11 páginasCantidades FisicasJofcoAún no hay calificaciones
- Teoria Taller 3Documento18 páginasTeoria Taller 3Sofi AlmeidaAún no hay calificaciones
- Unidad N° 2: Cinemática en Dos Dimensiones: Vectores: Resumen y Resoluciones de Problemas. Capítulo 3 - SerwayDocumento6 páginasUnidad N° 2: Cinemática en Dos Dimensiones: Vectores: Resumen y Resoluciones de Problemas. Capítulo 3 - SerwayLourdes MoralesAún no hay calificaciones
- actividad3 trabajo vector 1er año fisicaIIMOMENTODocumento10 páginasactividad3 trabajo vector 1er año fisicaIIMOMENTONancy MedinaAún no hay calificaciones
- Guia Final de VectoresDocumento24 páginasGuia Final de Vectoresjhongarcia@itm.edu.co89% (9)
- Sistemas de Referencia y VectoresDocumento20 páginasSistemas de Referencia y VectoresEsteban ParraAún no hay calificaciones
- Ensayo VectoresDocumento8 páginasEnsayo VectoresMoon VG100% (2)
- Geometria AnaliticaDocumento73 páginasGeometria AnaliticaAdo BlonsterAún no hay calificaciones
- Fisica Tema CompletoDocumento45 páginasFisica Tema CompletoCesar Agusto Purihuaman CajoAún no hay calificaciones
- Trabajo Final de EstaticaDocumento31 páginasTrabajo Final de Estaticaakira inoaAún no hay calificaciones
- VectoresDocumento6 páginasVectoresBastian irribarraAún no hay calificaciones
- 1.1 Definición de Un Vector en R2 y R3, y Su Interpretación Geométrica.Documento9 páginas1.1 Definición de Un Vector en R2 y R3, y Su Interpretación Geométrica.BeTo MartinezAún no hay calificaciones
- Estática 3 Vectores en El EspacioDocumento10 páginasEstática 3 Vectores en El Espaciosangabriel1973Aún no hay calificaciones
- Definición de Cantidades FísicasDocumento9 páginasDefinición de Cantidades FísicasGenser Ramirez100% (1)
- Vector EsDocumento5 páginasVector EsJavier SalgadoAún no hay calificaciones
- Universidad Tecnologica de La Region Norte de GuerreroDocumento31 páginasUniversidad Tecnologica de La Region Norte de GuerreroJose GarciaAún no hay calificaciones
- Https WWW - Aerocivil.gov - Co Atencion Planeacion ComoVamos 2PBCOMOVAMOSIITRIM2022300622V1KDocumento95 páginasHttps WWW - Aerocivil.gov - Co Atencion Planeacion ComoVamos 2PBCOMOVAMOSIITRIM2022300622V1KAlex RAAún no hay calificaciones
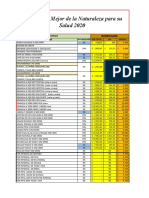
- Lista de Precios 2020 Domicilios PDFDocumento2 páginasLista de Precios 2020 Domicilios PDFAlex RAAún no hay calificaciones
- Variedades vegetarianas proti frutsDocumento32 páginasVariedades vegetarianas proti frutsAlex RAAún no hay calificaciones
- Control de AbejasDocumento8 páginasControl de AbejasAlex RAAún no hay calificaciones
- Sinematica de Trauma PDFDocumento19 páginasSinematica de Trauma PDFDaniel CobosAún no hay calificaciones
- Sistema de Comando de IncidentesDocumento59 páginasSistema de Comando de IncidentesFedericoRolandi100% (3)
- Informe de LamparasDocumento16 páginasInforme de LamparasJenner Alexander Naquiche HornaAún no hay calificaciones
- Informe de La Práctica de Laboratorio de Física N°3 - 2021-01-15Documento6 páginasInforme de La Práctica de Laboratorio de Física N°3 - 2021-01-15aidaAún no hay calificaciones
- Generador de Van de Graff-1Documento23 páginasGenerador de Van de Graff-1FabianaAún no hay calificaciones
- TRABAJO 1 Sistemas Eléctricos de Potencia eMOOCDocumento15 páginasTRABAJO 1 Sistemas Eléctricos de Potencia eMOOCJuan Carlos Callas GarayAún no hay calificaciones
- 02EjerciciosTecnología 2ºDocumento3 páginas02EjerciciosTecnología 2ºElvio LalolisAún no hay calificaciones
- Trabajo de ContactoresDocumento41 páginasTrabajo de Contactoresadrian80% (5)
- Manual Instalaciones Eléctricas Domiciliarias CAi-Usach 2020Documento60 páginasManual Instalaciones Eléctricas Domiciliarias CAi-Usach 2020ManuelAún no hay calificaciones
- Problemas Serie ParaleloDocumento2 páginasProblemas Serie ParaleloAlejandro Ramirez CarocaAún no hay calificaciones
- Folleto TUBO DE RUBENSDocumento1 páginaFolleto TUBO DE RUBENSAdriana RojasAún no hay calificaciones
- Laboratorio 1Documento15 páginasLaboratorio 1Richard David Alegre CanazaAún no hay calificaciones
- NRF-022 Interruptores de Poste de 72.5 A 420 KVDocumento40 páginasNRF-022 Interruptores de Poste de 72.5 A 420 KVdarkneoss67% (3)
- Lab11 Ley de Hooke y Movimiento Armonico SimpleDocumento5 páginasLab11 Ley de Hooke y Movimiento Armonico SimpleJose D Sanchez BurgosAún no hay calificaciones
- Informe 1 Del Diodo SemiconductorDocumento7 páginasInforme 1 Del Diodo SemiconductorOscar ContrerasAún no hay calificaciones
- Capítulo 4. Circuitos Rectificadores Controlados y No ControladosDocumento28 páginasCapítulo 4. Circuitos Rectificadores Controlados y No ControladosDavid LlanosAún no hay calificaciones
- Movimiento de tierras y maquinaria de construcciónDocumento34 páginasMovimiento de tierras y maquinaria de construcciónJose MoncadaAún no hay calificaciones
- Leyes y teoremas básicos de circuitos eléctricosDocumento27 páginasLeyes y teoremas básicos de circuitos eléctricosBastian Pizarro MonardesAún no hay calificaciones
- Folleto de Física 6to de SecundariaDocumento14 páginasFolleto de Física 6to de SecundariaRichard Antonio Santos Fabian100% (1)
- Voy CaminandoDocumento4 páginasVoy CaminandoJeanKeinerWyLopez100% (2)
- Modulo 1 Conceptos MMCDocumento11 páginasModulo 1 Conceptos MMCMario ArceAún no hay calificaciones
- Lab01 C24B PieroCRDocumento8 páginasLab01 C24B PieroCRPiero CotrinaAún no hay calificaciones
- Practica Millikan TeoriaDocumento4 páginasPractica Millikan TeoriaDvid HórusAún no hay calificaciones
- Cou LombDocumento7 páginasCou LombritaAún no hay calificaciones
- Laboratorio Caf1Documento8 páginasLaboratorio Caf1Carlos Ivan Cruz CamposAún no hay calificaciones
- SegundaCondicionEquilibrioDocumento7 páginasSegundaCondicionEquilibrioMark Yupari100% (1)
- 02-Estabilidad QRGDocumento113 páginas02-Estabilidad QRGO GA0% (1)
- Física General: Tarea 3 sobre Dinámica y EnergíaDocumento22 páginasFísica General: Tarea 3 sobre Dinámica y EnergíaRoosevelt DiazAún no hay calificaciones
- Práctica 8-2da. Ley de Newton (Asignación)Documento4 páginasPráctica 8-2da. Ley de Newton (Asignación)Lis MorantesAún no hay calificaciones
- Trabajo de Investigacion Energia MecanicaDocumento11 páginasTrabajo de Investigacion Energia MecanicaYury EynstenAún no hay calificaciones
- PLAN DE ESTUDIOS FISICA Grado 9-11 2019Documento20 páginasPLAN DE ESTUDIOS FISICA Grado 9-11 2019vkatotvAún no hay calificaciones