También podría gustarte
- UF1214 - Mantenimiento de motores térmicos de dos y cuatro tiemposDe EverandUF1214 - Mantenimiento de motores térmicos de dos y cuatro tiemposCalificación: 5 de 5 estrellas5/5 (1)
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209De EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Calificación: 5 de 5 estrellas5/5 (2)
- Curso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorDe EverandCurso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorAún no hay calificaciones
- UF1217 - Mantenimiento de sistemas auxiliares del motor de ciclo dieselDe EverandUF1217 - Mantenimiento de sistemas auxiliares del motor de ciclo dieselCalificación: 3.5 de 5 estrellas3.5/5 (3)
- Actuadores PresentacionesDocumento44 páginasActuadores PresentacionesJhon Henry Avendaño GonzalezAún no hay calificaciones
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109De EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Aún no hay calificaciones
- Actuadores. Válvulas de Control Clase 7 y 8Documento31 páginasActuadores. Válvulas de Control Clase 7 y 8Jordan G. TorresAún no hay calificaciones
- Komatsu WA430-6Documento16 páginasKomatsu WA430-6Foromaquinas80% (5)
- Estrategia Competitiva en Tiempos de Cambio Caso de 5261558Documento4 páginasEstrategia Competitiva en Tiempos de Cambio Caso de 5261558Kenny Junior Mercedes RojasAún no hay calificaciones
- PRACTICA Final Resuelto AshDocumento3 páginasPRACTICA Final Resuelto AshAlexandra FlorAún no hay calificaciones
- Mantenimiento, preparación y manejo de tractores. AGAC0108De EverandMantenimiento, preparación y manejo de tractores. AGAC0108Aún no hay calificaciones
- Norbert Elias - Los AlemanesDocumento212 páginasNorbert Elias - Los Alemanesxmlbiox100% (9)
- Actuadores ElectricosDocumento8 páginasActuadores ElectricosAlan Garcia100% (2)
- Ensayo ActuadoresDocumento9 páginasEnsayo Actuadoresrodrigo0% (1)
- Motores ElectricoDocumento25 páginasMotores ElectricoLisbeth Apaza CondoriAún no hay calificaciones
- Sistemas de ImpulsionDocumento26 páginasSistemas de ImpulsionJavier Bertoni CoriAún no hay calificaciones
- Actuadores Elect, Neumaticos-HidráulicosDocumento38 páginasActuadores Elect, Neumaticos-HidráulicosbassAún no hay calificaciones
- ActuadoresDocumento10 páginasActuadoresANDY RAMOS BARRÓN100% (1)
- Unidad ActuadoresDocumento25 páginasUnidad ActuadoresDanny Çedeño CscAún no hay calificaciones
- Aplicación de Los Actuadores en La Instrumentación de ProcesosDocumento12 páginasAplicación de Los Actuadores en La Instrumentación de ProcesosLeo LázaroAún no hay calificaciones
- Apuntes de RoboticaDocumento40 páginasApuntes de RoboticaDavid A. D'LimaAún no hay calificaciones
- Fundamentos de Robotica PDFDocumento40 páginasFundamentos de Robotica PDFedward trianaAún no hay calificaciones
- Apuntes de RoboticaDocumento37 páginasApuntes de RoboticaMiguel AbrilAún no hay calificaciones
- ActuadoresDocumento3 páginasActuadoresgaby100% (2)
- Tipo de Actuadores EléctricosDocumento4 páginasTipo de Actuadores EléctricosEnrique AlvarezAún no hay calificaciones
- Investigacion Unidad 3 IntrumentacionDocumento38 páginasInvestigacion Unidad 3 IntrumentacionDanna LopezAún no hay calificaciones
- Unidad 3 InstrumentaciònDocumento12 páginasUnidad 3 InstrumentaciònSalvadorAún no hay calificaciones
- Expo Actuadores Instrumentación IndustrialDocumento38 páginasExpo Actuadores Instrumentación IndustrialSebastián Rivera PabónAún no hay calificaciones
- ActuadoresDocumento5 páginasActuadoreswhitepaladinAún no hay calificaciones
- Motores Especiales: Polos sombreados, pasos, servos y linealesDocumento33 páginasMotores Especiales: Polos sombreados, pasos, servos y linealesTachi64Aún no hay calificaciones
- T8 IyC 5V EHAIDocumento11 páginasT8 IyC 5V EHAIALEXIS IVAN ESCOBEDO HERRERAAún no hay calificaciones
- Aplicacion de Los Actuadores en La IndustriaDocumento13 páginasAplicacion de Los Actuadores en La IndustriaAndrés HidalgoAún no hay calificaciones
- Dinamica de ManipuladoresDocumento17 páginasDinamica de ManipuladoresVictor Bernal LandaAún no hay calificaciones
- Resumen Libro Fundamentos de RoboticaDocumento41 páginasResumen Libro Fundamentos de RoboticaaaAún no hay calificaciones
- Arranque y Control de Velocidad de Motores de Corriente ContinuaDocumento4 páginasArranque y Control de Velocidad de Motores de Corriente ContinuaHenry Jhonson Coronado ChanameAún no hay calificaciones
- ACTUADORESDocumento6 páginasACTUADORESferneismh08Aún no hay calificaciones
- Actuadores mecatrónicos UAEDocumento5 páginasActuadores mecatrónicos UAELuis RosadoAún no hay calificaciones
- ActuadoresDocumento12 páginasActuadoresAntonio75% (4)
- A Ctu AdoresDocumento6 páginasA Ctu AdoresSerafín Lazcano AparicioAún no hay calificaciones
- 3.1 - 3.3 ActuadoresDocumento40 páginas3.1 - 3.3 ActuadoresSG Manuel JuanAún no hay calificaciones
- ACTUADORESDocumento4 páginasACTUADORESBrianAún no hay calificaciones
- UD9 Soldadura de RobotDocumento39 páginasUD9 Soldadura de RobotCristian Viqueira carnotaAún no hay calificaciones
- Actuadores de ControlDocumento39 páginasActuadores de Controlkemberly oviedoAún no hay calificaciones
- Instrumentación y Control. Equipo 6 - 5.3. - Actuadores (Servomotores)Documento35 páginasInstrumentación y Control. Equipo 6 - 5.3. - Actuadores (Servomotores)Noe Espinoza romeroAún no hay calificaciones
- Actuadores Exposicion PDFDocumento13 páginasActuadores Exposicion PDFJean Carlos MuñizAún no hay calificaciones
- Actuadores industriales 40Documento9 páginasActuadores industriales 40ChoreJoseAún no hay calificaciones
- Actuador WikipediaDocumento5 páginasActuador WikipediaCharly Silvera MAún no hay calificaciones
- Actuadores TrabajoDocumento4 páginasActuadores TrabajodelialuzAún no hay calificaciones
- Sistemas Programables (Actuadores)Documento6 páginasSistemas Programables (Actuadores)Somx Duraznho Di ManzanithaAún no hay calificaciones
- Funcionamiento Del Actuador Electrico y NeumaticoDocumento21 páginasFuncionamiento Del Actuador Electrico y NeumaticoJose Antonio MirandaAún no hay calificaciones
- ActuadoresDocumento30 páginasActuadoresmanuel_avalos_21Aún no hay calificaciones
- Investigación ActuadoresDocumento15 páginasInvestigación Actuadoresmrscheshire23Aún no hay calificaciones
- Actuadores: tipos y funcionamiento enDocumento20 páginasActuadores: tipos y funcionamiento enAngel SegarraAún no hay calificaciones
- Servo MotorDocumento4 páginasServo MotorJason Mucha BarzolaAún no hay calificaciones
- Actuadores ElectromecánicosDocumento14 páginasActuadores Electromecánicosyair05Aún no hay calificaciones
- ACTIVIDAD2Documento7 páginasACTIVIDAD2daniel022194100% (12)
- Actuador Definicion S. XXIDocumento4 páginasActuador Definicion S. XXINiño De Tus SueñozAún no hay calificaciones
- Actuadores hidráulicos y herramientas de perforaciónDocumento13 páginasActuadores hidráulicos y herramientas de perforaciónnardajtAún no hay calificaciones
- Presentacion Actuadores Electricos PDFDocumento16 páginasPresentacion Actuadores Electricos PDFCHQXXVIIIAún no hay calificaciones
- Servomotores G6Documento35 páginasServomotores G6abdieltarqui7Aún no hay calificaciones
- Control preciso posición eje con servomotorDocumento5 páginasControl preciso posición eje con servomotorHumberto José Reyes CevallosAún no hay calificaciones
- Semana 19Documento8 páginasSemana 19Alex SandovalAún no hay calificaciones
- Actuadores de Un Lazo de ControlDocumento20 páginasActuadores de Un Lazo de ControlIE DE ARARCAAún no hay calificaciones
- Tema 4.2Documento8 páginasTema 4.2Aurora LopezAún no hay calificaciones
- Team ANDocumento4 páginasTeam ANAurora LopezAún no hay calificaciones
- Trabajo de Jehu AuroraDocumento9 páginasTrabajo de Jehu AuroraAurora LopezAún no hay calificaciones
- LopezA Tarea2 Modulo2 MapaconceptualDocumento4 páginasLopezA Tarea2 Modulo2 MapaconceptualAurora LopezAún no hay calificaciones
- Carrera:: Nodo Unión HidalgoDocumento17 páginasCarrera:: Nodo Unión HidalgoAurora LopezAún no hay calificaciones
- Actividad 4.2.publicidadDocumento9 páginasActividad 4.2.publicidadAurora LopezAún no hay calificaciones
- HOMEWORK LopezA StoryDocumento6 páginasHOMEWORK LopezA StoryAurora LopezAún no hay calificaciones
- DiodoDocumento22 páginasDiodoAurora LopezAún no hay calificaciones
- Ventiladores MaquiHidraDocumento19 páginasVentiladores MaquiHidraAurora LopezAún no hay calificaciones
- Reporte AurisDocumento3 páginasReporte AurisAurora LopezAún no hay calificaciones
- V Examen, MecanicaDocumento11 páginasV Examen, MecanicaAurora LopezAún no hay calificaciones
- Analisis Transitorio12Documento14 páginasAnalisis Transitorio12Aurora LopezAún no hay calificaciones
- Metas SergioDocumento1 páginaMetas SergioAurora LopezAún no hay calificaciones
- 2expo MicrobDocumento8 páginas2expo MicrobAurora LopezAún no hay calificaciones
- 4.1 Trabajo de EcuacionesDocumento12 páginas4.1 Trabajo de EcuacionesAurora LopezAún no hay calificaciones
- Mezclas No ReactivasDocumento19 páginasMezclas No ReactivasAurora LopezAún no hay calificaciones
- Cuestionario1, InstruDocumento6 páginasCuestionario1, InstruAurora LopezAún no hay calificaciones
- Job, Transferencia DC, ALMDocumento19 páginasJob, Transferencia DC, ALMAurora LopezAún no hay calificaciones
- Mecanicajob, 25 Enero 21Documento11 páginasMecanicajob, 25 Enero 21Aurora LopezAún no hay calificaciones
- 4.1 Trabajo de EcuacionesDocumento12 páginas4.1 Trabajo de EcuacionesAurora LopezAún no hay calificaciones
- Válvulas de Control, Instru, AlmDocumento29 páginasVálvulas de Control, Instru, AlmAurora LopezAún no hay calificaciones
- MarcoJuridico, 22 Enero 21Documento3 páginasMarcoJuridico, 22 Enero 21Aurora LopezAún no hay calificaciones
- Unidad 4, JobmecaDocumento12 páginasUnidad 4, JobmecaAurora LopezAún no hay calificaciones
- 01 Ecuacion Fundamental, AuroraLMDocumento16 páginas01 Ecuacion Fundamental, AuroraLMAurora LopezAún no hay calificaciones
- Cervantes XDXDXDDocumento8 páginasCervantes XDXDXDAurora LopezAún no hay calificaciones
- Servicio Social 04Documento3 páginasServicio Social 04Aurora LopezAún no hay calificaciones
- Descripción de GamesaDocumento4 páginasDescripción de GamesaAurora Lopez100% (1)
- Gestión de conflictosDocumento14 páginasGestión de conflictosAurora LopezAún no hay calificaciones
- 2expo MicrobDocumento8 páginas2expo MicrobAurora LopezAún no hay calificaciones
- Disolucion Liquidacion Extincion SociedadesDocumento9 páginasDisolucion Liquidacion Extincion SociedadesRuben Horacio Rios Silva100% (1)
- La importancia de los idiomas mayasDocumento35 páginasLa importancia de los idiomas mayasCarlos PortilloAún no hay calificaciones
- Investigación Graficos de Control EtDocumento4 páginasInvestigación Graficos de Control EtMario MartinezAún no hay calificaciones
- ParafrasearDocumento2 páginasParafrasearivan sotoAún no hay calificaciones
- De La Evaluacion y Promocion de Estudiantes Con DiscapacidadDocumento6 páginasDe La Evaluacion y Promocion de Estudiantes Con DiscapacidadEliana MunozAún no hay calificaciones
- Malla Ic 4443104 PDFDocumento1 páginaMalla Ic 4443104 PDFFrancisco Javier Rojas MuñozAún no hay calificaciones
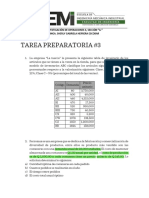
- Tarea Preparatoria 03Documento3 páginasTarea Preparatoria 03Gabriela MartínezAún no hay calificaciones
- Por Qué Se Llama Sistema DigestivoDocumento5 páginasPor Qué Se Llama Sistema DigestivoManuel LiscanoAún no hay calificaciones
- Entrevista El Valor de La DiferenciasDocumento5 páginasEntrevista El Valor de La DiferenciasAlma Jenny Jiménez AbadAún no hay calificaciones
- Glosario Ovino - Caprino 2 CorteDocumento13 páginasGlosario Ovino - Caprino 2 CorteCarol Daniela GarzonAún no hay calificaciones
- Prueba de síntesis de Historia, Geografía y Cs. Sociales 2° BásicoDocumento3 páginasPrueba de síntesis de Historia, Geografía y Cs. Sociales 2° BásicoCastillo DanyAún no hay calificaciones
- Manual Conductor March 2012Documento242 páginasManual Conductor March 2012wcruz100% (1)
- Tarea Semana 4 BoletinDocumento3 páginasTarea Semana 4 Boletinandres pintoAún no hay calificaciones
- P2L1SDocumento5 páginasP2L1SkijhgfAún no hay calificaciones
- CHÉRCOLES, A.docx EL EXAMEN DE CONCIENCIA, SÍNTESIS DE LOS EJERCICIOSDocumento4 páginasCHÉRCOLES, A.docx EL EXAMEN DE CONCIENCIA, SÍNTESIS DE LOS EJERCICIOSSebasti_n_Elvi_5722Aún no hay calificaciones
- Tesis de Felicidad en Villa El SalvadorDocumento104 páginasTesis de Felicidad en Villa El SalvadorAlvaro CanréAún no hay calificaciones
- Ejercicios de LateralidadDocumento2 páginasEjercicios de LateralidadCarmenduAún no hay calificaciones
- Preguntas de Autoevaluación Capítulo 24Documento4 páginasPreguntas de Autoevaluación Capítulo 24oscar26108750% (2)
- Que Es Comunicacion y ElementosDocumento4 páginasQue Es Comunicacion y ElementosCésar PadawanAún no hay calificaciones
- Identificacion de Las Personas Con Discapacidad en Los TerritoriosDocumento22 páginasIdentificacion de Las Personas Con Discapacidad en Los TerritoriosDianaLucia92Aún no hay calificaciones
- Tema 3 Investigacion ADCGDocumento16 páginasTema 3 Investigacion ADCGAmayrani De la CruzAún no hay calificaciones
- Manual Del Operador de La Fresadora Vertical Program CNC BasicaDocumento24 páginasManual Del Operador de La Fresadora Vertical Program CNC Basicatafurbm_679549677Aún no hay calificaciones
- Ejercicio3 (Recuperado Automáticamente)Documento6 páginasEjercicio3 (Recuperado Automáticamente)arnold pereiraAún no hay calificaciones
- Felipe Ayala Dorado DIDÁCTICA UNIVERSITARIA POR COMPETENCIASDocumento2 páginasFelipe Ayala Dorado DIDÁCTICA UNIVERSITARIA POR COMPETENCIASfelipeayaladoradoAún no hay calificaciones
- Historia Del Huevo en ColombiaDocumento10 páginasHistoria Del Huevo en ColombiaDaironAlexanderMeloRubianoAún no hay calificaciones
- Diureticos CFDocumento2 páginasDiureticos CFJennyfer BauAún no hay calificaciones