También podría gustarte
- Plantas piloto de tratamiento de agua potable y agua residualDe EverandPlantas piloto de tratamiento de agua potable y agua residualCalificación: 5 de 5 estrellas5/5 (1)
- Práctica 3Documento6 páginasPráctica 3Miriam CabralAún no hay calificaciones
- Parcial CSTRDocumento23 páginasParcial CSTRSteven SalgadoAún no hay calificaciones
- Intercambiadores de CalorDocumento14 páginasIntercambiadores de CalorMarcelo VilcaAún no hay calificaciones
- Laboratorio de RefrigeracionDocumento8 páginasLaboratorio de Refrigeracionbyron pesantesAún no hay calificaciones
- Optimizacion de Un Intercambiador de Calor TuboDocumento6 páginasOptimizacion de Un Intercambiador de Calor TuboSaul Perez PerezAún no hay calificaciones
- Examen de Lab ControlDocumento9 páginasExamen de Lab ControlTania Villanueva DiazAún no hay calificaciones
- Balances de EnergiaDocumento5 páginasBalances de EnergiaNatalia CastilloAdroverAún no hay calificaciones
- Laboratorio de Primera y Segunda Ley de La TermodinámicaDocumento10 páginasLaboratorio de Primera y Segunda Ley de La TermodinámicaFavio Rojas ValenzuelaAún no hay calificaciones
- Intercambiador de Calor en SerpentinDocumento28 páginasIntercambiador de Calor en SerpentinYsabel Huaccallo AguilarAún no hay calificaciones
- Practican°5 Vince Rivera Ggamar PDFDocumento11 páginasPractican°5 Vince Rivera Ggamar PDFVinc Rivera GgamarAún no hay calificaciones
- Trabajo Final Control TerminalDocumento29 páginasTrabajo Final Control TerminalmrvelandiacAún no hay calificaciones
- Laboratorio de Control de TemperaturaDocumento16 páginasLaboratorio de Control de TemperaturaSteven SalgadoAún no hay calificaciones
- Reactor EnchaquetadoDocumento27 páginasReactor EnchaquetadoSantiago350100% (1)
- Informe 3 de TQDocumento13 páginasInforme 3 de TQVALERIA ANDREA ZUBIETA MARTINEZAún no hay calificaciones
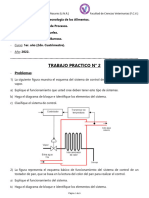
- TRABAJO PRACTICO 2 - AutomatizaciónDocumento9 páginasTRABAJO PRACTICO 2 - AutomatizaciónGabriel Orlando BarrosoAún no hay calificaciones
- Descomposición Catalítica de Peróxido de HidrógenoDocumento31 páginasDescomposición Catalítica de Peróxido de HidrógenoRomy ArenazasAún no hay calificaciones
- Proy Final. Diseño Controlador PIDDocumento0 páginasProy Final. Diseño Controlador PIDDiana M MoremAún no hay calificaciones
- Laboratorio Ciclo de RefrigeraciónDocumento9 páginasLaboratorio Ciclo de RefrigeraciónDaniela RamosAún no hay calificaciones
- Andrea Armijos-Informe 6. Torre de EnfriamientoDocumento13 páginasAndrea Armijos-Informe 6. Torre de Enfriamientobrigeth100% (1)
- Laboratorio 2 TermofouidosDocumento6 páginasLaboratorio 2 TermofouidosJulio Cesar Estupiñan CorreaAún no hay calificaciones
- Laboratorio Presión de Saturación 1Documento17 páginasLaboratorio Presión de Saturación 1Daniela RamosAún no hay calificaciones
- 100000i83n-Guia N°3-Labtrans01-Intercambiadores de CalorDocumento7 páginas100000i83n-Guia N°3-Labtrans01-Intercambiadores de Caloralonsninja10Aún no hay calificaciones
- Control de Un Reactor CSTRDocumento12 páginasControl de Un Reactor CSTRMiguel LennonAún no hay calificaciones
- Informe de TransferenciaDocumento3 páginasInforme de TransferenciaAdriana Paola Cuesta garcesAún no hay calificaciones
- Coeficiente ConvectivopdfDocumento5 páginasCoeficiente ConvectivopdfMaricruz Del CarmenAún no hay calificaciones
- Ejercicio SImulinkDocumento12 páginasEjercicio SImulinkPaola Olivares SanchezAún no hay calificaciones
- LED y Fototransistor Infrarrojos TIL32 y TIL78Documento6 páginasLED y Fototransistor Infrarrojos TIL32 y TIL78FranciscoEndaraAún no hay calificaciones
- Viernes-Práctica 2-Intercambiador de CalorDocumento13 páginasViernes-Práctica 2-Intercambiador de CalorMelissa VergaraAún no hay calificaciones
- Laboratorio de Transferencia de Calor 1Documento5 páginasLaboratorio de Transferencia de Calor 1Digna Bettin CuelloAún no hay calificaciones
- Proyecto Final ControlDocumento7 páginasProyecto Final ControlMiguel RodriguezAún no hay calificaciones
- CA 9B P3 Trujillo Ocaña.Documento12 páginasCA 9B P3 Trujillo Ocaña.cato061001Aún no hay calificaciones
- Capítulo 9 Regulación AutomáticaDocumento59 páginasCapítulo 9 Regulación AutomáticaCESAR AUGUSTO GALEANO TORRESAún no hay calificaciones
- Reporte Práctica 2 Manuel 8BM1Documento5 páginasReporte Práctica 2 Manuel 8BM1Alex AuditoreAún no hay calificaciones
- tp4 PDFDocumento13 páginastp4 PDFGodo SánchezAún no hay calificaciones
- Informe de Enfriamiento-Grupo3Documento24 páginasInforme de Enfriamiento-Grupo3Thalia Miranda PereiraAún no hay calificaciones
- Guía PL04 AI-443 Humidificación PsicrometríaDocumento10 páginasGuía PL04 AI-443 Humidificación PsicrometríaChris QCAún no hay calificaciones
- Informe Laboratorio N°3Documento11 páginasInforme Laboratorio N°3JeremyAún no hay calificaciones
- Tanque Amortiguado Introducción Control ProcesosDocumento20 páginasTanque Amortiguado Introducción Control ProcesosmrvelandiacAún no hay calificaciones
- PRACTICAN°5 Resuelta VINCE RIVERADocumento13 páginasPRACTICAN°5 Resuelta VINCE RIVERAVinc Rivera GgamarAún no hay calificaciones
- PDF Practica 1 de Lab de TermodinamicadocxDocumento10 páginasPDF Practica 1 de Lab de TermodinamicadocxjuanAún no hay calificaciones
- Practica de Laboratorio Primera Ley Termodinamica .-.Documento7 páginasPractica de Laboratorio Primera Ley Termodinamica .-.Adrian SanchezAún no hay calificaciones
- Termodinámica - Laboratorio 2Documento4 páginasTermodinámica - Laboratorio 2Andres Camilo Samaniego VargasAún no hay calificaciones
- Laboratorio N°1 Control de ProcesosDocumento11 páginasLaboratorio N°1 Control de ProcesosNico PerezAún no hay calificaciones
- Informe de Ley de Enfriamiento de NewtonDocumento10 páginasInforme de Ley de Enfriamiento de NewtonVictor Cabrera Huaman0% (1)
- Primera Asignacion 10%Documento6 páginasPrimera Asignacion 10%Joaquin CalderaAún no hay calificaciones
- Practica 1 de Lab de TermodinamicaDocumento10 páginasPractica 1 de Lab de TermodinamicaLeonel Leon MartinezAún no hay calificaciones
- Practica 3 Simulacion Control en Cascada 21Documento8 páginasPractica 3 Simulacion Control en Cascada 21Yon LopezAún no hay calificaciones
- Descomposicion Catalitica Del H2o2Documento21 páginasDescomposicion Catalitica Del H2o2Alan J. López DíazAún no hay calificaciones
- 4.1 Control de RelacionDocumento23 páginas4.1 Control de RelacionKarla Torres100% (1)
- Manual de Uso de La Torre de Paredes Humedas.Documento8 páginasManual de Uso de La Torre de Paredes Humedas.Natalia Cano TrianaAún no hay calificaciones
- Control Planta de TemperaturaDocumento20 páginasControl Planta de TemperaturaAlexis GongoraAún no hay calificaciones
- Informe - Torre de EnfriamientoDocumento21 páginasInforme - Torre de EnfriamientoJulian Andres Pineda RiosAún no hay calificaciones
- Recirculacion en Regimen EstacionarioDocumento3 páginasRecirculacion en Regimen EstacionarioSebastiánVintimilla100% (1)
- Camisa y SerpentinDocumento6 páginasCamisa y Serpentinluis vergaraAún no hay calificaciones
- Sistemas de Control2 - Control6Documento7 páginasSistemas de Control2 - Control6Emilio ContrerasAún no hay calificaciones
- Manual Practica Laboratorio IiiDocumento7 páginasManual Practica Laboratorio IiiManuel CortesAún no hay calificaciones
- Tubos ConcentricosDocumento5 páginasTubos ConcentricosDany Daniel Cordero VegaAún no hay calificaciones
- Laboratorio 2 InformeDocumento13 páginasLaboratorio 2 InformeAlejandro Morales VelezAún no hay calificaciones
- Trabajo Cultura Del Agua - LaboratoriosDocumento7 páginasTrabajo Cultura Del Agua - LaboratoriosEstefania Angel ClavijoAún no hay calificaciones
- Control de PresiónDocumento8 páginasControl de PresiónEstefania Angel ClavijoAún no hay calificaciones
- Plantilla SimpleDocumento13 páginasPlantilla SimpleEstefania Angel ClavijoAún no hay calificaciones
- Presentación Análisis de AlternativasSPI1Documento19 páginasPresentación Análisis de AlternativasSPI1Estefania Angel ClavijoAún no hay calificaciones
- Poster SireasiDocumento4 páginasPoster SireasiEstefania Angel ClavijoAún no hay calificaciones
- Examen Parcial2019-2smarzo 16 de 2020Documento8 páginasExamen Parcial2019-2smarzo 16 de 2020Estefania Angel ClavijoAún no hay calificaciones
- Taller 1 ControlDocumento2 páginasTaller 1 ControlEstefania Angel ClavijoAún no hay calificaciones
- Taller Balances de Materia Sin RXN QuimicaDocumento2 páginasTaller Balances de Materia Sin RXN QuimicaEstefania Angel ClavijoAún no hay calificaciones
- Programa Balance de Materia y Energia 2022-2S Grupo 2Documento9 páginasPrograma Balance de Materia y Energia 2022-2S Grupo 2Estefania Angel ClavijoAún no hay calificaciones
- Diagrama de FlujoDocumento6 páginasDiagrama de FlujoPalomitajr XdAún no hay calificaciones
- Web DAV TheDocumento3 páginasWeb DAV TheF. V.Aún no hay calificaciones
- Informe Proyecto Redes Ind Primer Parcial PDFDocumento26 páginasInforme Proyecto Redes Ind Primer Parcial PDFSteeven TaipicañaAún no hay calificaciones
- CPLDDocumento6 páginasCPLDAdriana Elorza RamosAún no hay calificaciones
- Ejercicio 2Documento2 páginasEjercicio 2bba88304Aún no hay calificaciones
- Manual Burleteadora HGIT Es-EsDocumento39 páginasManual Burleteadora HGIT Es-EsGustavo KAún no hay calificaciones
- ALTECH Catalogo Mexico 2013Documento116 páginasALTECH Catalogo Mexico 2013etorin100% (1)
- Tipos de SisDDocumento4 páginasTipos de SisDCarlos AndradeAún no hay calificaciones
- Generador de Seales CKP y CMP - Compress PDFDocumento7 páginasGenerador de Seales CKP y CMP - Compress PDFmackAún no hay calificaciones
- Mapa ConceptualDocumento3 páginasMapa ConceptualAlejandra Polanco MejiaAún no hay calificaciones
- 3b - Subrasante de Suelo Seleccionado (Vers. 1.0)Documento7 páginas3b - Subrasante de Suelo Seleccionado (Vers. 1.0)Laboratorio DPV Entre Rios100% (1)
- Sup - Popocatepetl 1Documento5 páginasSup - Popocatepetl 1derwiing canoAún no hay calificaciones
- 8902501-039 Instalación y Uso Acceso Teclado Autónomo-CONTROL SIMONDocumento2 páginas8902501-039 Instalación y Uso Acceso Teclado Autónomo-CONTROL SIMONnedaclimaAún no hay calificaciones
- Ie-01 Primer Nivel-Alumbrado-Ie-1Documento1 páginaIe-01 Primer Nivel-Alumbrado-Ie-1Alexander DsiempreAún no hay calificaciones
- Radicacion de Numeros Reales 9 Grado 2021Documento4 páginasRadicacion de Numeros Reales 9 Grado 2021Sharick MonsalvoAún no hay calificaciones
- Organizador Grafico Historia Del InternetDocumento1 páginaOrganizador Grafico Historia Del InternetAna Suarez100% (2)
- Estrategias de Búsqueda de Información ConfiableDocumento2 páginasEstrategias de Búsqueda de Información ConfiableGerardo CarreñoAún no hay calificaciones
- Para Qué Sirven Las TICDocumento2 páginasPara Qué Sirven Las TICJade EscobarAún no hay calificaciones
- Ana María Del Cueto - Grupos, Instituciones y ComunidadesDocumento96 páginasAna María Del Cueto - Grupos, Instituciones y ComunidadesJuan Carlos ZordanAún no hay calificaciones
- HTML5 Video Streaming Desde Google Drive PDFDocumento21 páginasHTML5 Video Streaming Desde Google Drive PDFMiguel QuezadaAún no hay calificaciones
- Generar Curvas de Nivel A Partir de Un CSV QgisDocumento20 páginasGenerar Curvas de Nivel A Partir de Un CSV Qgisfemin49249Aún no hay calificaciones
- Ejercicios-Resueltos PseIntDocumento19 páginasEjercicios-Resueltos PseIntCelis Reinaldo Castro PonceAún no hay calificaciones
- Punta San Luis 2 (Septiembre 2018) v2 PDFDocumento1 páginaPunta San Luis 2 (Septiembre 2018) v2 PDFDaniel Carlos Reyes ReyesAún no hay calificaciones
- Tarea 2 - Laura Romero - 387Documento4 páginasTarea 2 - Laura Romero - 387Viiviiz RomeroAún no hay calificaciones
- Practica 6Documento10 páginasPractica 6Isaac Tonatiuh Ayala PérezAún no hay calificaciones
- TP-PASADO-1 (1) Solution CloudDocumento28 páginasTP-PASADO-1 (1) Solution Clouddavis suclleAún no hay calificaciones
- Entregable Ciclo de ConexiónDocumento34 páginasEntregable Ciclo de ConexiónJuana HuinchoAún no hay calificaciones
- Word N1Documento232 páginasWord N1Paula Andrea Jaramillo AAún no hay calificaciones
- Practica 3. Configuración de Un Servidor DNSDocumento2 páginasPractica 3. Configuración de Un Servidor DNSJAVIERAún no hay calificaciones
- Electrocardiógrafo PDFDocumento14 páginasElectrocardiógrafo PDFBautista Reyes Adela RianelAún no hay calificaciones
- La revolución de la glucosa: Equilibra tus niveles de glucosa y cambiarás tu salud y tu vidaDe EverandLa revolución de la glucosa: Equilibra tus niveles de glucosa y cambiarás tu salud y tu vidaCalificación: 5 de 5 estrellas5/5 (205)
- 50 técnicas de mindfulness para la ansiedad, la depresión, el estrés y el dolor: Mindfulness como terapiaDe Everand50 técnicas de mindfulness para la ansiedad, la depresión, el estrés y el dolor: Mindfulness como terapiaCalificación: 4 de 5 estrellas4/5 (37)
- Cómo Aprender por tu Cuenta: Los Secretos de los Mejores Autodidáctas para Acelerar tu Aprendizaje sin Depender de los DemásDe EverandCómo Aprender por tu Cuenta: Los Secretos de los Mejores Autodidáctas para Acelerar tu Aprendizaje sin Depender de los DemásCalificación: 4 de 5 estrellas4/5 (10)
- Cuerpo Tóxico: Como Liberar Tu Cuerpo De Las Toxinas Externas E Internas, Y Evitar Asi Los Efectos De Los Radicales LibresDe EverandCuerpo Tóxico: Como Liberar Tu Cuerpo De Las Toxinas Externas E Internas, Y Evitar Asi Los Efectos De Los Radicales LibresCalificación: 5 de 5 estrellas5/5 (2)
- Disciplina Mental: Técnicas infalibles para lograr todo lo que te propones y eliminar la pereza y la procrastinación de tu vida para siempreDe EverandDisciplina Mental: Técnicas infalibles para lograr todo lo que te propones y eliminar la pereza y la procrastinación de tu vida para siempreCalificación: 5 de 5 estrellas5/5 (3)
- El concepto Mulligan de terapia manual (Color)De EverandEl concepto Mulligan de terapia manual (Color)Calificación: 5 de 5 estrellas5/5 (3)
- Homo antecessor: El nacimiento de una especieDe EverandHomo antecessor: El nacimiento de una especieCalificación: 5 de 5 estrellas5/5 (1)
- PREM de Pediatría: capacitación para el ENARMDe EverandPREM de Pediatría: capacitación para el ENARMCalificación: 1 de 5 estrellas1/5 (1)
- La metamedicina. Cada síntoma es un mensaje: La curación a tu alcanceDe EverandLa metamedicina. Cada síntoma es un mensaje: La curación a tu alcanceCalificación: 5 de 5 estrellas5/5 (8)
- La invasión de la pseudociencia: Claves para orientarse en un mundo en donde casi todo es posibleDe EverandLa invasión de la pseudociencia: Claves para orientarse en un mundo en donde casi todo es posibleCalificación: 4.5 de 5 estrellas4.5/5 (15)
- Ondas de choque extracorpóreas radiales: Aplicación en patologías músculo esqueléticasDe EverandOndas de choque extracorpóreas radiales: Aplicación en patologías músculo esqueléticasCalificación: 5 de 5 estrellas5/5 (3)
- Manual de pruebas diagnósticas: Traumatología y ortopediaDe EverandManual de pruebas diagnósticas: Traumatología y ortopediaCalificación: 4 de 5 estrellas4/5 (3)
- Interpretación del ECG: Una Guía Práctica e Intuitiva para Aprender a Leer el ECG y Diagnosticar y Tratar ArritmiasDe EverandInterpretación del ECG: Una Guía Práctica e Intuitiva para Aprender a Leer el ECG y Diagnosticar y Tratar ArritmiasAún no hay calificaciones
- Confección de cojines y ropa de hogar. TCPF0309De EverandConfección de cojines y ropa de hogar. TCPF0309Aún no hay calificaciones
- Manual de ortopedia maxilar: Modelo diagnóstico de maloclusiones para pacientes en crecimientoDe EverandManual de ortopedia maxilar: Modelo diagnóstico de maloclusiones para pacientes en crecimientoCalificación: 4.5 de 5 estrellas4.5/5 (14)
- UF0054: APROVISIONAMIENTO DE MATERIAS PRIMAS EN COCINA (HOTR0108)De EverandUF0054: APROVISIONAMIENTO DE MATERIAS PRIMAS EN COCINA (HOTR0108)Aún no hay calificaciones
- El Método Agile: Lo que Necesita Saber Sobre Gestión de Proyectos Agile, el Proceso Kanban, Pensamiento Lean, y ScrumDe EverandEl Método Agile: Lo que Necesita Saber Sobre Gestión de Proyectos Agile, el Proceso Kanban, Pensamiento Lean, y ScrumCalificación: 5 de 5 estrellas5/5 (1)
- Batidos Verdes Depurativos y Antioxidantes: Aumenta tu Vitalidad con Smoothie Detox Durante 10 Días Para Adelgazar y Bajar de Peso: Aumenta tu vitalidad con smoothie detox durante 10 días para adelgazar y bajar de pesoDe EverandBatidos Verdes Depurativos y Antioxidantes: Aumenta tu Vitalidad con Smoothie Detox Durante 10 Días Para Adelgazar y Bajar de Peso: Aumenta tu vitalidad con smoothie detox durante 10 días para adelgazar y bajar de pesoCalificación: 5 de 5 estrellas5/5 (2)
- Liberación del trauma: Perdón y temblor es el caminoDe EverandLiberación del trauma: Perdón y temblor es el caminoCalificación: 4 de 5 estrellas4/5 (4)
- Anatomía del caballo: Guía práctica ilustradaDe EverandAnatomía del caballo: Guía práctica ilustradaCalificación: 4 de 5 estrellas4/5 (9)
- Sesgos Cognitivos: Una Fascinante Mirada dentro de la Psicología Humana y los Métodos para Evitar la Disonancia Cognitiva, Mejorar sus Habilidades para Resolver Problemas y Tomar Mejores DecisionesDe EverandSesgos Cognitivos: Una Fascinante Mirada dentro de la Psicología Humana y los Métodos para Evitar la Disonancia Cognitiva, Mejorar sus Habilidades para Resolver Problemas y Tomar Mejores DecisionesCalificación: 4.5 de 5 estrellas4.5/5 (13)