También podría gustarte
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109De EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Aún no hay calificaciones
- Curso moderno de máquinas eléctricas rotativas. Tomo II: Máquinas de corriente continuaDe EverandCurso moderno de máquinas eléctricas rotativas. Tomo II: Máquinas de corriente continuaAún no hay calificaciones
- ME 342 2019 05 Maquinas de CC 2 v1Documento27 páginasME 342 2019 05 Maquinas de CC 2 v1Daniel scanioAún no hay calificaciones
- ME 342 2019 05 Maquinas de CC 1 v1Documento101 páginasME 342 2019 05 Maquinas de CC 1 v1Rodrigo Mamani ApazaAún no hay calificaciones
- Motores Ca AlumnosDocumento19 páginasMotores Ca AlumnosAnakin Manjarrez ViverosAún no hay calificaciones
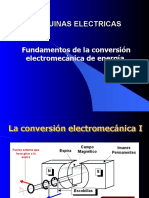
- Conversion ElectromecanicaDocumento26 páginasConversion ElectromecanicaCarlos Rudas RamirezAún no hay calificaciones
- Accionamientos ElectricosDocumento71 páginasAccionamientos ElectricosJEDPAún no hay calificaciones
- MAQUINAS DE CCDocumento22 páginasMAQUINAS DE CCValeriaAún no hay calificaciones
- Reciprocidad de Las Maquinas Sincronicas ObjetivosDocumento6 páginasReciprocidad de Las Maquinas Sincronicas ObjetivosJesus Manuel Tambo LimachiAún no hay calificaciones
- Motores DC: Funcionamiento y CaracterísticasDocumento23 páginasMotores DC: Funcionamiento y Característicasrodrigo mamani apazaAún no hay calificaciones
- S03 Jvital 2018 02Documento57 páginasS03 Jvital 2018 02Carlos Ivan Prado Gardini100% (1)
- Tema 4. DiodosDocumento44 páginasTema 4. DiodosPakillo ToreroAún no hay calificaciones
- EI2 Drives A3Documento22 páginasEI2 Drives A3vicentepresencia91Aún no hay calificaciones
- Convertidores DC DC No AisladosDocumento10 páginasConvertidores DC DC No AisladosAngelo Aco MendozaAún no hay calificaciones
- Máquinas Eléctricas Especiales Tema 7Documento18 páginasMáquinas Eléctricas Especiales Tema 7valeriaAún no hay calificaciones
- Amplificadores operacionales: Características y aplicacionesDocumento71 páginasAmplificadores operacionales: Características y aplicacionesMatias LicanqueoAún no hay calificaciones
- Mmee Maquinas ElectricasDocumento23 páginasMmee Maquinas ElectricasIvan OstaAún no hay calificaciones
- Transform AdoresDocumento48 páginasTransform AdoresElizabeth parraAún no hay calificaciones
- Ejercicios 3Documento15 páginasEjercicios 3nickolis58754Aún no hay calificaciones
- Motor Traccion DCDocumento19 páginasMotor Traccion DCPABLO MAURO100% (1)
- Explicacion TP N 3 Motor Asincronico TrifasicoDocumento12 páginasExplicacion TP N 3 Motor Asincronico TrifasicogracielaAún no hay calificaciones
- Semana 4 Máquinas EléctricasDocumento9 páginasSemana 4 Máquinas EléctricasDarwin ChicaizaAún no hay calificaciones
- TPL N°8 - Generador de CCDocumento17 páginasTPL N°8 - Generador de CCAnsnew ENgineAún no hay calificaciones
- Presentation MotoresDocumento84 páginasPresentation MotoresEsteban TobarAún no hay calificaciones
- Maquinas ElectricasDocumento29 páginasMaquinas ElectricasLuz Milagros Follegatti RomeroAún no hay calificaciones
- Ahorro de Energía Oferta Eaton DrivesDocumento100 páginasAhorro de Energía Oferta Eaton DrivesSilverio LeonAún no hay calificaciones
- PrepaPráctica6 Díaz Moreno Torres GR9Documento8 páginasPrepaPráctica6 Díaz Moreno Torres GR9Mateo TorresAún no hay calificaciones
- Presentacion Modulo Hibrido ToyotaDocumento29 páginasPresentacion Modulo Hibrido ToyotalholgadoAún no hay calificaciones
- Tema 8 Maquinas Electricas RotativasDocumento20 páginasTema 8 Maquinas Electricas RotativasPaolo Alessandro MarcoAún no hay calificaciones
- Máquinas Asincrónicas (Parte 2.1)Documento19 páginasMáquinas Asincrónicas (Parte 2.1)GIANAún no hay calificaciones
- Conversion y Maquina ContinuaDocumento29 páginasConversion y Maquina ContinuaLautiMussoAún no hay calificaciones
- Tema 02Documento79 páginasTema 02Farouk ElAún no hay calificaciones
- Reporte XI - El Motor Universal PDFDocumento9 páginasReporte XI - El Motor Universal PDFEdinson Cortes BallesterosAún no hay calificaciones
- Principios de conversión electromecánica de energía en máquinas eléctricasDocumento18 páginasPrincipios de conversión electromecánica de energía en máquinas eléctricasMalco BaldovinoAún no hay calificaciones
- MotorDocumento3 páginasMotorJohanna RiberoAún no hay calificaciones
- Arturo Lab 5 de MaquinasDocumento21 páginasArturo Lab 5 de MaquinasArturoAún no hay calificaciones
- Prot Sist Pot-Capitulo7Documento160 páginasProt Sist Pot-Capitulo7Jhuly AnaAún no hay calificaciones
- MOTORES ELÉCTRICOSDocumento16 páginasMOTORES ELÉCTRICOSSamuel Romero MorenoAún no hay calificaciones
- Laboratorio 05Documento11 páginasLaboratorio 05Jorge Enrique Laos PintoAún no hay calificaciones
- US PLUS General BeneficiosDocumento45 páginasUS PLUS General BeneficiosWilson Yesid Perez Castañeda50% (2)
- Instrumento ElectrodinámicoDocumento8 páginasInstrumento ElectrodinámicoMiguel sosaAún no hay calificaciones
- Maquinas T1Documento3 páginasMaquinas T1Kelinn RiveraaAún no hay calificaciones
- Amplificadores de Pequeña SeñalDocumento31 páginasAmplificadores de Pequeña Señalwilfredo aliagaAún no hay calificaciones
- Maquina DC y Maquina SincronaDocumento15 páginasMaquina DC y Maquina SincronaCarlos Eduardo Vásquez BolañosAún no hay calificaciones
- Cee-4 JoDocumento77 páginasCee-4 JoDiego ValdiviezoAún no hay calificaciones
- 09 Maquinas IiDocumento9 páginas09 Maquinas IiHernan Larraín FuentesAún no hay calificaciones
- Eficiencia Energetica Variadores de Frecuencia 2019Documento56 páginasEficiencia Energetica Variadores de Frecuencia 2019Sergio Andres Lagos Martinez100% (1)
- Lab. Maq. de C.C - WebDocumento16 páginasLab. Maq. de C.C - Webchati1491Aún no hay calificaciones
- Generador de Corriente Continua PDFDocumento13 páginasGenerador de Corriente Continua PDFJhonatan A OrzAún no hay calificaciones
- Wuolah Free TE1819 02 PCresueltoDocumento8 páginasWuolah Free TE1819 02 PCresueltoPaula SanzAún no hay calificaciones
- 1.3 AE EV - Sistema de Conversión de PotenciaDocumento13 páginas1.3 AE EV - Sistema de Conversión de PotenciaMatias GutierrezAún no hay calificaciones
- ResumenDocumento5 páginasResumenFranklin Vargas GòmezAún no hay calificaciones
- Simulador de módulos AC para pruebas y reparacionesDocumento21 páginasSimulador de módulos AC para pruebas y reparacionesBraulio PinedaAún no hay calificaciones
- Neradores de CDDocumento29 páginasNeradores de CDJonathan SilvaAún no hay calificaciones
- L1 - A2A - GRUPO - 4 - PERDOMO - MORALES - CALDERON - BELTRAN - PDF - Andres Felipe PerdomoDocumento5 páginasL1 - A2A - GRUPO - 4 - PERDOMO - MORALES - CALDERON - BELTRAN - PDF - Andres Felipe PerdomoAndres Felipe PerdomoAún no hay calificaciones
- Presentacion VariadoresDocumento36 páginasPresentacion VariadoresEsteban TobarAún no hay calificaciones
- PRACTICA No. 5 Motor de C.C Conexion PARALELODocumento7 páginasPRACTICA No. 5 Motor de C.C Conexion PARALELOAlejandro RGarciaAún no hay calificaciones
- Motores y Generadores Electricos 3bb PDFDocumento43 páginasMotores y Generadores Electricos 3bb PDFJonathan RuedaAún no hay calificaciones
- Unidad I Fundamentos Conceptuales y Parametros de Sistemas de PotenciaDocumento35 páginasUnidad I Fundamentos Conceptuales y Parametros de Sistemas de PotenciaEddy Farfan HuamangaAún no hay calificaciones
- Introducción de Maquinas EléctricasDocumento51 páginasIntroducción de Maquinas EléctricasEnrique Diaz RubioAún no hay calificaciones
- Neumática_P1_EII_2020Documento19 páginasNeumática_P1_EII_2020Daniel scanioAún no hay calificaciones
- SC_EGI 2021_T2Documento4 páginasSC_EGI 2021_T2Daniel scanioAún no hay calificaciones
- CAN BusDocumento5 páginasCAN BusDaniel scanioAún no hay calificaciones
- Neumática_P2_EII_2020Documento8 páginasNeumática_P2_EII_2020Daniel scanioAún no hay calificaciones
- SC_Sensores_2020Documento23 páginasSC_Sensores_2020Daniel scanioAún no hay calificaciones
- COMUNICACIONES. Medios para transmitir señales_ Conexión por lazo de corriente 4 20 ma. Transmisión analógica_ corriente proporcional a una magnitudDocumento24 páginasCOMUNICACIONES. Medios para transmitir señales_ Conexión por lazo de corriente 4 20 ma. Transmisión analógica_ corriente proporcional a una magnitudDaniel scanioAún no hay calificaciones
- Clase 4 AdministracionDocumento8 páginasClase 4 AdministracionFlorr WazowskiAún no hay calificaciones
- Soberanía Nacional Día 20 NoviembreDocumento2 páginasSoberanía Nacional Día 20 NoviembreAmpareli Oye100% (1)
- Can-Bus, protocolo comunicación automóvilDocumento9 páginasCan-Bus, protocolo comunicación automóvilCesar PacoriAún no hay calificaciones
- 7 TriacDocumento18 páginas7 TriacDaniel scanioAún no hay calificaciones
- Características de CI - 2da ParteDocumento30 páginasCaracterísticas de CI - 2da ParteDaniel scanioAún no hay calificaciones
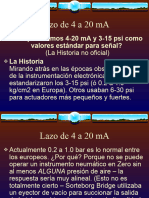
- Lazo_de_4_a_20_Ma_1_Documento26 páginasLazo_de_4_a_20_Ma_1_Daniel scanioAún no hay calificaciones
- Cómo Escribir Un BlogDocumento2 páginasCómo Escribir Un BlogDaniel scanioAún no hay calificaciones
- 17 de AgostoDocumento2 páginas17 de AgostoDaniel scanioAún no hay calificaciones
- PlanDocumento7 páginasPlanDaniel scanioAún no hay calificaciones
- Vender para no tener pérdidas: margen de contribución y punto de equilibrioDocumento8 páginasVender para no tener pérdidas: margen de contribución y punto de equilibrioDaniel scanioAún no hay calificaciones
- 2 Circuitos Con DiodosDocumento12 páginas2 Circuitos Con DiodosDaniel scanioAún no hay calificaciones
- Unidad 4Documento33 páginasUnidad 4Daniel scanioAún no hay calificaciones
- Resolucion 258 IESDocumento15 páginasResolucion 258 IESDaniel scanioAún no hay calificaciones
- Representación de números en sistemas binarios, octales y hexadecimalesDocumento31 páginasRepresentación de números en sistemas binarios, octales y hexadecimalesDaniel scanioAún no hay calificaciones
- 3 TransistoresDocumento15 páginas3 TransistoresDaniel scanioAún no hay calificaciones
- Material de Apoyo Guia de Aprendizaje 1xDocumento13 páginasMaterial de Apoyo Guia de Aprendizaje 1xDaniel scanioAún no hay calificaciones
- 1 DiodosDocumento11 páginas1 DiodosDaniel scanioAún no hay calificaciones
- Lenguaje CDocumento103 páginasLenguaje CDaniel scanioAún no hay calificaciones
- Resumen Unidad5Documento15 páginasResumen Unidad5Daniel scanioAún no hay calificaciones
- Resumen Unidad6Documento18 páginasResumen Unidad6Daniel scanioAún no hay calificaciones
- Ley de Gauss: Flujo eléctrico neto igual a carga neta entre superficie cerradaDocumento3 páginasLey de Gauss: Flujo eléctrico neto igual a carga neta entre superficie cerradaDaniel scanioAún no hay calificaciones
- Codificación de caracteres: De ASCII a UnicodeDocumento5 páginasCodificación de caracteres: De ASCII a UnicodeDaniel scanioAún no hay calificaciones
- Ejercicios en PsudocodigosDocumento6 páginasEjercicios en PsudocodigosDaniel scanioAún no hay calificaciones
- Solucion Taller de Resistencia de MaterialesDocumento47 páginasSolucion Taller de Resistencia de MaterialesRuben Dario Hernandez SalazarAún no hay calificaciones
- Taller 1 FundamentosDocumento2 páginasTaller 1 FundamentosMariana FlorezAún no hay calificaciones
- Pérdidas de energía por accesorios laboratorio hidráulicaDocumento9 páginasPérdidas de energía por accesorios laboratorio hidráulicaAlejandra AscencioAún no hay calificaciones
- Unidad II EDL de Orden SuperiorDocumento23 páginasUnidad II EDL de Orden SuperiorJesús Alberto Báez HigueraAún no hay calificaciones
- Carta de Presentacion de Cem Idustrial EirlDocumento3 páginasCarta de Presentacion de Cem Idustrial EirlAdalid EspinozaAún no hay calificaciones
- Diseño de un proyecto en Civil 3DDocumento24 páginasDiseño de un proyecto en Civil 3DAnder IAAún no hay calificaciones
- Física: MRU y MRUADocumento6 páginasFísica: MRU y MRUAxXmisshii misshiiXxAún no hay calificaciones
- Ciencias Naturales 8° JM y JT Semana 31 y 32Documento5 páginasCiencias Naturales 8° JM y JT Semana 31 y 32Michael Julian Prada QuinteroAún no hay calificaciones
- Lab Fisica 3 Practica 2 y 3Documento8 páginasLab Fisica 3 Practica 2 y 3Edson5826Aún no hay calificaciones
- Instituto Ecuatoriano de Normalización: Norma Técnica Ecuatoriana Nte Inen 2 322:2002Documento20 páginasInstituto Ecuatoriano de Normalización: Norma Técnica Ecuatoriana Nte Inen 2 322:2002antonio escuderoAún no hay calificaciones
- Ejercicios de HidrostáticaDocumento6 páginasEjercicios de HidrostáticaPaco Medina CondorAún no hay calificaciones
- Polaridad de transformadoresDocumento13 páginasPolaridad de transformadoresGabriel Condori PacoAún no hay calificaciones
- El AlternadorDocumento9 páginasEl AlternadorLimbert ChoqueAún no hay calificaciones
- TC Ib 20212 Pec1Documento9 páginasTC Ib 20212 Pec1BycrakerAún no hay calificaciones
- FRIGIDAIRE Códigos de ErrorDocumento11 páginasFRIGIDAIRE Códigos de Erroralfredo100% (1)
- Informe N°2 Equilibrio RotacionalDocumento7 páginasInforme N°2 Equilibrio RotacionalMarxus JPEAún no hay calificaciones
- Sistema FotovoltaicoDocumento23 páginasSistema FotovoltaicoxDarZonx viAún no hay calificaciones
- Pre-Informe 2 (Wildren)Documento8 páginasPre-Informe 2 (Wildren)E'nder GaonaAún no hay calificaciones
- Laboratorio de Reposicion 1era EpDocumento3 páginasLaboratorio de Reposicion 1era EpKevin Poma100% (1)
- Verificaciones Comprobaciones IntermediasDocumento12 páginasVerificaciones Comprobaciones IntermediascpinedaAún no hay calificaciones
- Practica Humidificacion y Secado-Labiii-Equipo-1Documento13 páginasPractica Humidificacion y Secado-Labiii-Equipo-1Diego Flores100% (1)
- ATV630D18N4 característicasDocumento14 páginasATV630D18N4 característicascamilo pallaresAún no hay calificaciones
- S04.s2 - Resolver EjerciciosDocumento2 páginasS04.s2 - Resolver EjerciciosJhonson Canchari0% (1)
- Plano TopograficoDocumento1 páginaPlano TopograficoFelipe NegretteAún no hay calificaciones
- MP-CA002 Politica Ensayos Aptitud 2Documento19 páginasMP-CA002 Politica Ensayos Aptitud 2Fernando FigueroaAún no hay calificaciones
- 3. DINÁMICA DE LA PARTÍCULADocumento2 páginas3. DINÁMICA DE LA PARTÍCULAotrascosas0027Aún no hay calificaciones
- S03.s1 - Ejes en Traslación, Componentes Tangencial y NormalDocumento39 páginasS03.s1 - Ejes en Traslación, Componentes Tangencial y Normaltania reynilda davila vilcaAún no hay calificaciones
- Revista Ciencias Técnicas Agropecuarias 1010-2760: Issn: Paneque@isch - Edu.cuDocumento6 páginasRevista Ciencias Técnicas Agropecuarias 1010-2760: Issn: Paneque@isch - Edu.cuCAROLINA ARDAYA NERYAún no hay calificaciones
- Magnetismo EjerciciosDocumento6 páginasMagnetismo EjerciciosLuli OcamposAún no hay calificaciones
- Fisica 22Documento3 páginasFisica 22melissa lopezAún no hay calificaciones
- BOBINADocumento8 páginasBOBINAVALENTINA JARAMILLO RAQUEJOAún no hay calificaciones