También podría gustarte
- PID DiscretizadoDocumento7 páginasPID DiscretizadoArmando UribeAún no hay calificaciones
- Examen de Lab ControlDocumento9 páginasExamen de Lab ControlTania Villanueva DiazAún no hay calificaciones
- Control PIDDocumento15 páginasControl PIDRicardo RamirezAún no hay calificaciones
- Tema2.1 - Introduccion Al Diseño de Sistemas de ControlDocumento47 páginasTema2.1 - Introduccion Al Diseño de Sistemas de ControlJuan Carlos Leon Martinez100% (1)
- Sintonización de Controlador PID Mediante Ziegler-NicholsDocumento25 páginasSintonización de Controlador PID Mediante Ziegler-Nicholsjessie rojas bonillaAún no hay calificaciones
- Control TemperaturaDocumento13 páginasControl TemperaturaMichael Hemar Mamani CalcinAún no hay calificaciones
- Optotransistor de Encapsulado RanuradoDocumento17 páginasOptotransistor de Encapsulado Ranuradoxxxdanielsss100% (1)
- Instrumentación de ProcesosDocumento10 páginasInstrumentación de ProcesosIsmael MinchalaAún no hay calificaciones
- Fase 4 - Carlos FigueroaDocumento5 páginasFase 4 - Carlos FigueroaJorman Manrique100% (1)
- CONTROLADORESDocumento12 páginasCONTROLADORESeduardo arcecruzAún no hay calificaciones
- Control de Flujo de Agua en Un TanqueDocumento9 páginasControl de Flujo de Agua en Un TanqueJHOJAN ARLEY VARELA CARABALIAún no hay calificaciones
- Semana 7 Ingenieria de Control Sesion 2Documento40 páginasSemana 7 Ingenieria de Control Sesion 2Nilton NiltonAún no hay calificaciones
- ME 6 ControladoresDocumento29 páginasME 6 ControladoresJorgeAún no hay calificaciones
- Informe Sistemas de Control 4Documento15 páginasInforme Sistemas de Control 4Gamer AllianceAún no hay calificaciones
- Análisis Dinámico de Un ControladorDocumento32 páginasAnálisis Dinámico de Un ControladorJuan Roldán Castillo100% (1)
- Quispillo 2158 Métodos de Control PidDocumento5 páginasQuispillo 2158 Métodos de Control PidLincoln MorenoAún no hay calificaciones
- Control Dos PosicionesDocumento27 páginasControl Dos Posicionesabigail camposAún no hay calificaciones
- Practica 1 EquipoDocumento9 páginasPractica 1 EquipoRICARDO PINA IBARRAAún no hay calificaciones
- Laboratori N°6 Sintonizacion Por Lazo CerradoDocumento20 páginasLaboratori N°6 Sintonizacion Por Lazo CerradoAlberto Miguel Quispe LimaAún no hay calificaciones
- Laboratorio 2 - Adquisicion Control On-Off Temperatura - BorisMeraDocumento14 páginasLaboratorio 2 - Adquisicion Control On-Off Temperatura - BorisMeraBoris Alexander Mera BautistaAún no hay calificaciones
- Quispillo 2158 Métodos de Control PidDocumento5 páginasQuispillo 2158 Métodos de Control PidLincoln MorenoAún no hay calificaciones
- Proyecto Final de ControlDocumento6 páginasProyecto Final de ControlAndres FelipeAún no hay calificaciones
- Posible Informe 4Documento14 páginasPosible Informe 4valentronicaAún no hay calificaciones
- Presentado ADocumento17 páginasPresentado AjohnAún no hay calificaciones
- Sistema Calefaccion Pid - ProteusDocumento12 páginasSistema Calefaccion Pid - ProteusSnaider Mendoza VillegasAún no hay calificaciones
- Ejercicios y Guia Del Método de Ziegler NicholsDocumento12 páginasEjercicios y Guia Del Método de Ziegler NicholsLuis LopezAún no hay calificaciones
- Sistemas de Control2 - Control6Documento7 páginasSistemas de Control2 - Control6Emilio ContrerasAún no hay calificaciones
- Informe Planta Piloto - Control Automático de ProcesosDocumento10 páginasInforme Planta Piloto - Control Automático de ProcesosSANTIAGO FIUMEAún no hay calificaciones
- Control PID Con Microcontrolador PICDocumento19 páginasControl PID Con Microcontrolador PICYovani De JesúsAún no hay calificaciones
- Lab 3Documento14 páginasLab 3williamAún no hay calificaciones
- Laboratorio Controladores PIDDocumento13 páginasLaboratorio Controladores PIDPablo MontaluisaAún no hay calificaciones
- Informe Ing de Control LoveraDocumento14 páginasInforme Ing de Control Loverajaime roca espinalAún no hay calificaciones
- ForoDocumento7 páginasForoNoemi Huancas CorreaAún no hay calificaciones
- Contralador Pid - ParametrosDocumento8 páginasContralador Pid - ParametrosRyuzon A. IncaAún no hay calificaciones
- Informe 4 Laboratorio de Sistemas de Control Abrahamsz, BriceñoDocumento11 páginasInforme 4 Laboratorio de Sistemas de Control Abrahamsz, BriceñoAlex o Drippyjeffrey, da igual.Aún no hay calificaciones
- Trabajo Control 1 - Criogenizacion (Obtencion Nitrogeno Liquido)Documento28 páginasTrabajo Control 1 - Criogenizacion (Obtencion Nitrogeno Liquido)Guillermo QuinterosAún no hay calificaciones
- Proyecto Final Con ArduinoDocumento50 páginasProyecto Final Con ArduinoGiordano GarcíaAún no hay calificaciones
- Método de Ziegler y NicholsDocumento12 páginasMétodo de Ziegler y Nicholsaaron linkinAún no hay calificaciones
- Control Lab08Documento11 páginasControl Lab08Jean CcAún no hay calificaciones
- U2 Modos de Control - Ejercicios ClaseDocumento8 páginasU2 Modos de Control - Ejercicios ClasejoseAún no hay calificaciones
- Guia 7Documento15 páginasGuia 7FabianBañoAún no hay calificaciones
- Controlador PidDocumento9 páginasControlador PidLuis Gabriel Martinez OrdoñezAún no hay calificaciones
- Control Del Nivel Del Líduido Del Segundo Tanque en Un Sistema de Dos TanquesDocumento4 páginasControl Del Nivel Del Líduido Del Segundo Tanque en Un Sistema de Dos TanquesChristian RamiroAún no hay calificaciones
- Informe 1 Instrumentación y Control de ProcesosDocumento13 páginasInforme 1 Instrumentación y Control de ProcesosKenny SalazarAún no hay calificaciones
- Laboratorio N°1 Control de ProcesosDocumento11 páginasLaboratorio N°1 Control de ProcesosNico PerezAún no hay calificaciones
- Laboratorio Cuatro Control 2eeeeDocumento9 páginasLaboratorio Cuatro Control 2eeeeEmilio LovatonAún no hay calificaciones
- Controladores PID NQSSlides PDFDocumento107 páginasControladores PID NQSSlides PDFsantiago alonso perilla lozanoAún no hay calificaciones
- Control PID TemperaturaDocumento39 páginasControl PID TemperaturaOscar Torres GonzAún no hay calificaciones
- Metodos de SintonizacionDocumento5 páginasMetodos de SintonizacionDanielQCAún no hay calificaciones
- Control de InvernaderoDocumento38 páginasControl de InvernaderoJulian GonzalezAún no hay calificaciones
- Modelado y Respuesta TemporalDocumento4 páginasModelado y Respuesta TemporalalbertwillyAún no hay calificaciones
- Maqueta de Control PID Con ArduinoDocumento15 páginasMaqueta de Control PID Con ArduinoElmar Montiel Jimenez100% (1)
- Lab Ing Control - Informe 01Documento23 páginasLab Ing Control - Informe 01Juan Jose Yagua HuamayalliAún no hay calificaciones
- Informe Controladores PidDocumento20 páginasInforme Controladores Pidgeorge elio elmerAún no hay calificaciones
- Practico 2 PLC Control PasteurizadorDocumento12 páginasPractico 2 PLC Control PasteurizadorLaurita Alvarez100% (1)
- Reporte de Investigación Unidad 4: ControladoresDocumento10 páginasReporte de Investigación Unidad 4: ControladoresIván OsorioAún no hay calificaciones
- Control de Instrumentacion PDFDocumento8 páginasControl de Instrumentacion PDFLania100% (1)
- Control DigitalDocumento23 páginasControl DigitalDeimy TorresAún no hay calificaciones
- Teoria de Control Automatico 1 InformeDocumento5 páginasTeoria de Control Automatico 1 InformeJordan Ordoño AguirreAún no hay calificaciones
- Investigación 2 de ElectronicaDocumento12 páginasInvestigación 2 de Electronicaana zuletaAún no hay calificaciones
- Inf1 Ih Ar GS AzDocumento5 páginasInf1 Ih Ar GS Azana zuletaAún no hay calificaciones
- DINAMICA APLICADA-LabDocumento19 páginasDINAMICA APLICADA-Labana zuletaAún no hay calificaciones
- Tarea N°6Documento2 páginasTarea N°6ana zuletaAún no hay calificaciones
- Investigación 1 de ElectronicaDocumento13 páginasInvestigación 1 de Electronicaana zuletaAún no hay calificaciones
- Asignación TurbomáquinasDocumento5 páginasAsignación Turbomáquinasana zuletaAún no hay calificaciones
- Act1 Fia 1im242 Ar AzDocumento9 páginasAct1 Fia 1im242 Ar Azana zuletaAún no hay calificaciones
- El ProyectoDocumento13 páginasEl Proyectoana zuletaAún no hay calificaciones
- Lab4-Ing ElectricaDocumento17 páginasLab4-Ing Electricaana zuletaAún no hay calificaciones
- Asginción de TurbomáquinasDocumento5 páginasAsginción de Turbomáquinasana zuletaAún no hay calificaciones
- Inf1 Ic Ac AzDocumento9 páginasInf1 Ic Ac Azana zuletaAún no hay calificaciones
- Lab 4 y 5 (Compresible) de Fluidos IIDocumento7 páginasLab 4 y 5 (Compresible) de Fluidos IIana zuletaAún no hay calificaciones
- Lab 2 (Compresible) de Fluidos IIDocumento8 páginasLab 2 (Compresible) de Fluidos IIana zuletaAún no hay calificaciones
- Formulas y Tablas Del Capitulo 10Documento15 páginasFormulas y Tablas Del Capitulo 10ana zuletaAún no hay calificaciones
- PolimerizaciónDocumento2 páginasPolimerizaciónana zuletaAún no hay calificaciones
- Dinámica Aplicada-AsigDocumento7 páginasDinámica Aplicada-Asigana zuletaAún no hay calificaciones
- Parcial 1-ManufacturaDocumento4 páginasParcial 1-Manufacturaana zuletaAún no hay calificaciones
- Procesamiento de Cerámicos: Jesús Rosales Elian Cerrud Alexis Gómez Jaime Fung-CasianoDocumento13 páginasProcesamiento de Cerámicos: Jesús Rosales Elian Cerrud Alexis Gómez Jaime Fung-Casianoana zuletaAún no hay calificaciones
- TAREAMANDocumento1 páginaTAREAMANana zuletaAún no hay calificaciones
- Quiz2 ManufacturaDocumento3 páginasQuiz2 Manufacturaana zuletaAún no hay calificaciones
- TEMA 12 - Estabilidad en El Dominio de La FrecuenciaDocumento35 páginasTEMA 12 - Estabilidad en El Dominio de La Frecuenciaana zuletaAún no hay calificaciones
- Examen Final Teo CTRLDocumento1 páginaExamen Final Teo CTRLana zuletaAún no hay calificaciones
- Tarea 3-Fluidos-Ana ZuletaDocumento1 páginaTarea 3-Fluidos-Ana Zuletaana zuletaAún no hay calificaciones
- Informe de GiraDocumento15 páginasInforme de Giraana zuletaAún no hay calificaciones
- Termo 1ii135 Lab1Documento6 páginasTermo 1ii135 Lab1ana zuletaAún no hay calificaciones
- Formulas-Semestral FluidosDocumento6 páginasFormulas-Semestral Fluidosana zuletaAún no hay calificaciones
- Laboratorio N°2-Ing - EléctricaDocumento13 páginasLaboratorio N°2-Ing - Eléctricaana zuletaAún no hay calificaciones
- Laboratorio 2-CIEN. DE LOS MATERIALESDocumento18 páginasLaboratorio 2-CIEN. DE LOS MATERIALESana zuletaAún no hay calificaciones
- Laboratorio2 - Mec. de Materiales - Grupo2Documento19 páginasLaboratorio2 - Mec. de Materiales - Grupo2ana zuletaAún no hay calificaciones
- Laboratorio 8-ElectricaDocumento12 páginasLaboratorio 8-Electricaana zuletaAún no hay calificaciones
- Monografia Final para Imprimir222222Documento37 páginasMonografia Final para Imprimir222222Waltergty Patzi RojasAún no hay calificaciones
- LIMITES Mecanica de SuelosDocumento8 páginasLIMITES Mecanica de SuelosKaren AlayoAún no hay calificaciones
- Direccion de MarketingDocumento12 páginasDireccion de MarketingKarenAún no hay calificaciones
- Administración de Las Comunidades Virtuales T3U2Documento21 páginasAdministración de Las Comunidades Virtuales T3U2Fanny Cedillo HidalgoAún no hay calificaciones
- Modulo 22 3Documento3 páginasModulo 22 3Ana GallegosAún no hay calificaciones
- Especificaciones y Dimensiones para El Armado de CajasDocumento4 páginasEspecificaciones y Dimensiones para El Armado de CajasNatalia ChallaAún no hay calificaciones
- Concreto AvanzadoDocumento11 páginasConcreto AvanzadoSayra Guadalupe Leal HuertaAún no hay calificaciones
- Gestion de AprendizajeDocumento1 páginaGestion de AprendizajeJulio Ayala EspinosaAún no hay calificaciones
- Guía de Dibujo Técnico DIN Y ASADocumento4 páginasGuía de Dibujo Técnico DIN Y ASAandreaAún no hay calificaciones
- Ficha Tecnica Ds-Ruckus-R720-Es PDFDocumento7 páginasFicha Tecnica Ds-Ruckus-R720-Es PDFNoe FalconesAún no hay calificaciones
- S01.01 - Material - PuertasDocumento26 páginasS01.01 - Material - PuertasMartin HerreraAún no hay calificaciones
- Inventario Inox 14 Abril 2020Documento8 páginasInventario Inox 14 Abril 2020katiuskaAún no hay calificaciones
- Guía de Aprendizaje Desescolarizada ENDDocumento7 páginasGuía de Aprendizaje Desescolarizada ENDElsy Biviana Muñoz MolanoAún no hay calificaciones
- Manual AdminDocumento24 páginasManual AdminAndrés ObandoAún no hay calificaciones
- AWAwDocumento1 páginaAWAwvictorAún no hay calificaciones
- Guia de Remplazo de Mangueras CaterpillarDocumento9 páginasGuia de Remplazo de Mangueras CaterpillarDiego VelezAún no hay calificaciones
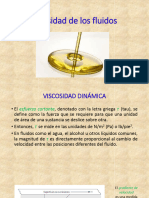
- Viscosidad de Los FluidosDocumento46 páginasViscosidad de Los FluidosDIEGO ALEXANDER CUEVA OBESOAún no hay calificaciones
- Tesis Marzo 2010 UruralGDocumento26 páginasTesis Marzo 2010 UruralGkarla bocoAún no hay calificaciones
- Tercero PaDocumento13 páginasTercero PaIsaura SanchezAún no hay calificaciones
- Descripción de PTW Programación Del 19 Al 25 de DiciembreDocumento4 páginasDescripción de PTW Programación Del 19 Al 25 de DiciembreandresAún no hay calificaciones
- Estrategia de Transformación Digital CooperativaDocumento2 páginasEstrategia de Transformación Digital CooperativaJose Luis Rodriguez SibajaAún no hay calificaciones
- INFORME PRÁCTICA 2 VectoresDocumento20 páginasINFORME PRÁCTICA 2 VectoresJUAN DAVID GONZALEZ TORRES100% (1)
- Act 4 Torres DiazDocumento9 páginasAct 4 Torres DiazCarlos Alberto Torres DíazAún no hay calificaciones
- PGD SabanagrandeDocumento28 páginasPGD SabanagrandeAlfredo Badillo De La CruzAún no hay calificaciones
- Ciencias Ambientales Avanzada PDFDocumento25 páginasCiencias Ambientales Avanzada PDFOscar BuitragoAún no hay calificaciones
- Rubrica de InformeDocumento1 páginaRubrica de InformeAriana Villar LopezAún no hay calificaciones
- CINDY GUADALUPE SALAZAR ESQUIVEL - ADA 1. 6°B Organizador Gráfico. WORD ARTDocumento5 páginasCINDY GUADALUPE SALAZAR ESQUIVEL - ADA 1. 6°B Organizador Gráfico. WORD ARTfigueroajuliocAún no hay calificaciones
- Qué Son Los PodcastDocumento9 páginasQué Son Los PodcastCrissAún no hay calificaciones
- Puntos Informe Instalacion AcometidasDocumento4 páginasPuntos Informe Instalacion AcometidasLeidy CamachoAún no hay calificaciones
- Ejercicios de ExcelDocumento23 páginasEjercicios de ExcelAlfredo Jair Salazar leónAún no hay calificaciones
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDe EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroCalificación: 4 de 5 estrellas4/5 (1)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- El Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenDe EverandEl Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenCalificación: 5 de 5 estrellas5/5 (8)
- El trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.De EverandEl trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.Calificación: 5 de 5 estrellas5/5 (1)
- Python Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWAREDe EverandPython Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWARECalificación: 4 de 5 estrellas4/5 (13)
- Cálculo integral: Técnicas de integraciónDe EverandCálculo integral: Técnicas de integraciónCalificación: 4 de 5 estrellas4/5 (8)
- Ciencia de datos: La serie de conocimientos esenciales de MIT PressDe EverandCiencia de datos: La serie de conocimientos esenciales de MIT PressCalificación: 5 de 5 estrellas5/5 (1)
- Sistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosDe EverandSistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosCalificación: 4 de 5 estrellas4/5 (16)
- Aprende a Modelar Aplicaciones con UML - Tercera EdiciónDe EverandAprende a Modelar Aplicaciones con UML - Tercera EdiciónCalificación: 2 de 5 estrellas2/5 (1)
- Electrónica básica: INGENIERÍA ELECTRÓNICA Y DE LAS COMUNICACIONESDe EverandElectrónica básica: INGENIERÍA ELECTRÓNICA Y DE LAS COMUNICACIONESCalificación: 5 de 5 estrellas5/5 (16)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteCalificación: 1 de 5 estrellas1/5 (1)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- Conquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesDe EverandConquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Cultura y clima: fundamentos para el cambio en la organizaciónDe EverandCultura y clima: fundamentos para el cambio en la organizaciónAún no hay calificaciones
- GuíaBurros: El controller de empresa: Cómo realizar el control total de tu empresaDe EverandGuíaBurros: El controller de empresa: Cómo realizar el control total de tu empresaAún no hay calificaciones
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Radiocomunicaciones: Teoría y principiosDe EverandRadiocomunicaciones: Teoría y principiosCalificación: 5 de 5 estrellas5/5 (3)
- Python Deep Learning: Introducción práctica con Keras y TensorFlow 2De EverandPython Deep Learning: Introducción práctica con Keras y TensorFlow 2Calificación: 3.5 de 5 estrellas3.5/5 (5)
- Inteligencia artificial: Una exploración filosófica sobre el futuro de la mente y la concienciaDe EverandInteligencia artificial: Una exploración filosófica sobre el futuro de la mente y la concienciaAna Isabel Sánchez DíezCalificación: 4 de 5 estrellas4/5 (3)
- Agile: Una guía para la Gestión de Proyectos Agile con Scrum, Kanban y LeanDe EverandAgile: Una guía para la Gestión de Proyectos Agile con Scrum, Kanban y LeanCalificación: 5 de 5 estrellas5/5 (1)
- Guía de aplicacion de la ISO 9001:2015De EverandGuía de aplicacion de la ISO 9001:2015Calificación: 5 de 5 estrellas5/5 (3)
- Toma de decisiones en las empresas: Entre el arte y la técnica: Metodologías, modelos y herramientasDe EverandToma de decisiones en las empresas: Entre el arte y la técnica: Metodologías, modelos y herramientasAún no hay calificaciones
- Gestión tecnológica hospitalaria: Un enfoque sistemicoDe EverandGestión tecnológica hospitalaria: Un enfoque sistemicoCalificación: 5 de 5 estrellas5/5 (3)