0% encontró este documento útil (0 votos)
95 vistas15 páginasControl PID en Sistemas de Control
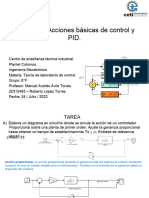
Este documento describe una práctica de laboratorio sobre sistemas de control PID. Se explican conceptos teóricos como lazo cerrado, retroalimentación, estabilidad e inestabilidad. Luego, se detalla el procedimiento experimental, donde se mide el comportamiento de un sistema sometido a disturbios en diferentes puntos, usando un controlador PID configurado con parámetros Kp, τI y τD. Finalmente, se analizan los resultados obtenidos y se concluye que el control PID es efectivo para estabilizar el sistema ante disturbios.
Cargado por
Gamer AllianceDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como DOCX, PDF, TXT o lee en línea desde Scribd
0% encontró este documento útil (0 votos)
95 vistas15 páginasControl PID en Sistemas de Control
Este documento describe una práctica de laboratorio sobre sistemas de control PID. Se explican conceptos teóricos como lazo cerrado, retroalimentación, estabilidad e inestabilidad. Luego, se detalla el procedimiento experimental, donde se mide el comportamiento de un sistema sometido a disturbios en diferentes puntos, usando un controlador PID configurado con parámetros Kp, τI y τD. Finalmente, se analizan los resultados obtenidos y se concluye que el control PID es efectivo para estabilizar el sistema ante disturbios.
Cargado por
Gamer AllianceDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como DOCX, PDF, TXT o lee en línea desde Scribd