También podría gustarte
- Previo 1 CEDocumento3 páginasPrevio 1 CEGutiérrez Carbajal AdrianAún no hay calificaciones
- Respuesta TemporalDocumento22 páginasRespuesta TemporalAnonymous BanTcoAún no hay calificaciones
- TRANSFERENCIA DE CALOR FormularioDocumento6 páginasTRANSFERENCIA DE CALOR FormularioÓscar Soto-GuaderramaAún no hay calificaciones
- Formula RioDocumento2 páginasFormula RioYONATHAN SANCHEZ BAILONAún no hay calificaciones
- ADA 3 Control de ProcesosDocumento13 páginasADA 3 Control de ProcesosCarlos EscobarAún no hay calificaciones
- Informe Sistema de ControlDocumento14 páginasInforme Sistema de ControlFelipeAlfonsoMuñozMorenoAún no hay calificaciones
- 11 - Error - EstableDocumento18 páginas11 - Error - EstableLuis AlccaAún no hay calificaciones
- Fórmulas Úteis - v2Documento1 páginaFórmulas Úteis - v2Project XAún no hay calificaciones
- ASIYSEG6E4RRTDocumento10 páginasASIYSEG6E4RRTDanae Guadalupe Perez NicolasAún no hay calificaciones
- Formulario Transformada de LaplaceDocumento1 páginaFormulario Transformada de LaplaceBrandon BeltranAún no hay calificaciones
- 11 - Error - EstableDocumento24 páginas11 - Error - EstableZkeiik Zaloo AlarconAún no hay calificaciones
- 11 Error EstableDocumento18 páginas11 Error EstableEslander CelisAún no hay calificaciones
- Formulario Unidad 2Documento3 páginasFormulario Unidad 2Juan Cristobal HdzAún no hay calificaciones
- Del Editor de Uso Ecuaciones en Microsoft WordDocumento1 páginaDel Editor de Uso Ecuaciones en Microsoft WordYaniris MendozaAún no hay calificaciones
- Del Editor de Uso Ecuaciones en Microsoft WordDocumento1 páginaDel Editor de Uso Ecuaciones en Microsoft WordYaniris MendozaAún no hay calificaciones
- Capitulo 3Documento28 páginasCapitulo 3Yecid MauricioAún no hay calificaciones
- Tarea 3 CompensadoresDocumento7 páginasTarea 3 Compensadorespapimentel01Aún no hay calificaciones
- Capitulo 3Documento28 páginasCapitulo 3Steeven CampañaAún no hay calificaciones
- Teoría Colas (Formulario)Documento1 páginaTeoría Colas (Formulario)Dulce María MedinaAún no hay calificaciones
- Control de Procesos No LinealesDocumento21 páginasControl de Procesos No LinealesJulianSanchezAún no hay calificaciones
- Modelado de Sistemas Térmicos, Hidráulicos y Analogías PDFDocumento34 páginasModelado de Sistemas Térmicos, Hidráulicos y Analogías PDFJENIFER RODRIGUEZ ROBAYOAún no hay calificaciones
- Formulario de FísicaDocumento7 páginasFormulario de FísicaDiego SegundoAún no hay calificaciones
- T.Fourier Propiedades 2Documento2 páginasT.Fourier Propiedades 2memes platinumAún no hay calificaciones
- Identidades Trigonometricas FundamentalesDocumento2 páginasIdentidades Trigonometricas FundamentalesJesus Nuñez CuevaAún no hay calificaciones
- Formulario DerivadasDocumento2 páginasFormulario Derivadasmelvin moralesAún no hay calificaciones
- Formulario Integracion 2.0Documento2 páginasFormulario Integracion 2.0Manuel Rafael Montalban AstudilloAún no hay calificaciones
- 05 Análisis de Fourier en Tiempo Continuo y DiscretoDocumento91 páginas05 Análisis de Fourier en Tiempo Continuo y DiscretoAlejandro Diaz BenavidezAún no hay calificaciones
- Cinética Química de Reacciones en EquilibrioDocumento7 páginasCinética Química de Reacciones en EquilibrioKevin GonzalesAún no hay calificaciones
- AntenasDocumento70 páginasAntenasAlejandra CardenasAún no hay calificaciones
- Formulario de CalculoDocumento1 páginaFormulario de CalculoErick Chávez BenavidesAún no hay calificaciones
- Formulas y Propiedades - Parcial N1Documento3 páginasFormulas y Propiedades - Parcial N1Agustin BarellaAún no hay calificaciones
- S05.s2 Trabajo de Clase 24 SepDocumento3 páginasS05.s2 Trabajo de Clase 24 Sepejac_ingAún no hay calificaciones
- Practica 4 ControlesDocumento20 páginasPractica 4 ControlesDavid LucasAún no hay calificaciones
- Taller 2 SensoresDocumento4 páginasTaller 2 SensoresGABRIELA PARADA BASTIDASAún no hay calificaciones
- Ejer Cici OsDocumento5 páginasEjer Cici Osalexandra perezAún no hay calificaciones
- Abrir P - MM1 - EJERCITARIO CARGA AXIAL 2024Documento19 páginasAbrir P - MM1 - EJERCITARIO CARGA AXIAL 2024j.silvaAún no hay calificaciones
- Actividad 6 Cureño Fuentes Adrian Jair 4AM1Documento10 páginasActividad 6 Cureño Fuentes Adrian Jair 4AM1Diegao PerezAún no hay calificaciones
- Hoja Formulas EFDocumento5 páginasHoja Formulas EFstefanyrsrAún no hay calificaciones
- DINAMICA DE SISTEMAS DE SEGUNDO ORDEN-fusionadoDocumento15 páginasDINAMICA DE SISTEMAS DE SEGUNDO ORDEN-fusionadoDlanorAún no hay calificaciones
- Dinámica en Sistemas: Hernández López Brandon Arturo Martínez Ayala Josué Guadalupe Reséndiz Meraz VanessaDocumento11 páginasDinámica en Sistemas: Hernández López Brandon Arturo Martínez Ayala Josué Guadalupe Reséndiz Meraz Vanessavanessa resendizAún no hay calificaciones
- Formulario Transformada de LaplaceDocumento3 páginasFormulario Transformada de LaplaceJairo Escobar100% (1)
- FORMULARIO 2 - Fis102 UltimoDocumento4 páginasFORMULARIO 2 - Fis102 UltimoNadina Aracely Gomez LicasAún no hay calificaciones
- Practica2 Grupo BDocumento9 páginasPractica2 Grupo BMauricio Jose Conza ArmijosAún no hay calificaciones
- Guía15 - PRQ500 - 3PDocumento9 páginasGuía15 - PRQ500 - 3PStanley Escobar AlanocaAún no hay calificaciones
- Aporte IndividualDocumento6 páginasAporte IndividualIsmael N. PucheAún no hay calificaciones
- Respuestas A Sistemas de Primer y Segundo Orden CompletoDocumento9 páginasRespuestas A Sistemas de Primer y Segundo Orden CompletoRUBEN EDUARDO TEJEDA QUIROZAún no hay calificaciones
- Clasificación de Funciones de TransferenciaDocumento4 páginasClasificación de Funciones de TransferenciaYhordan Smith Larico SanchezAún no hay calificaciones
- 1era PC Hidrodinamica NavalDocumento7 páginas1era PC Hidrodinamica NavalJOSE RAUL CUEVA ZIZOLDAún no hay calificaciones
- Metodo de Mallas, Nodos F.T.Documento11 páginasMetodo de Mallas, Nodos F.T.Gibran SilvaAún no hay calificaciones
- CursoMIMO Clase10-ControlabilidadObservabilidad P2Documento8 páginasCursoMIMO Clase10-ControlabilidadObservabilidad P2Juan Andrés Caballero MartínezAún no hay calificaciones
- HojadeecuacionesaDocumento1 páginaHojadeecuacionesaRocio VillalbaAún no hay calificaciones
- Formulario de SimulaciónDocumento2 páginasFormulario de SimulaciónashlyduartAún no hay calificaciones
- Función de Transferencia IDocumento2 páginasFunción de Transferencia IYUCRA SILVESTRE JOSE DENNISAún no hay calificaciones
- CC Modelo MatemáticoDocumento12 páginasCC Modelo MatemáticoLuis Fernando Cortez PeñuelasAún no hay calificaciones
- Tablas de TransformadasDocumento6 páginasTablas de TransformadasAndres Sebastian Parra EstebanAún no hay calificaciones
- Hoja de NovedadesDocumento1 páginaHoja de NovedadesAlejandroAún no hay calificaciones
- Informe 3 - TPP - XVDocumento18 páginasInforme 3 - TPP - XVAlejandroAún no hay calificaciones
- Indicadores Sostenibilidad Plan ElectrificacionDocumento105 páginasIndicadores Sostenibilidad Plan ElectrificacionAlejandroAún no hay calificaciones
- Proyecto Instrumentacion - Balanza DigitalDocumento10 páginasProyecto Instrumentacion - Balanza DigitalAlejandroAún no hay calificaciones
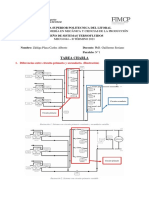
- Tarea 4 - Tarea CharlaDocumento2 páginasTarea 4 - Tarea CharlaAlejandroAún no hay calificaciones
- Examen de Primer Parcial de Estadística DescriptivaDocumento3 páginasExamen de Primer Parcial de Estadística DescriptivaAlejandroAún no hay calificaciones
- Proyecto TurbomaquinariaDocumento1 páginaProyecto TurbomaquinariaAlejandroAún no hay calificaciones
- Proyecto Mecánica de Fluidos II GRUPO 3Documento22 páginasProyecto Mecánica de Fluidos II GRUPO 3AlejandroAún no hay calificaciones
- Sistemas de Control Aplicados 22 ClaseDocumento14 páginasSistemas de Control Aplicados 22 ClaseAlejandroAún no hay calificaciones
- Sistemas de Control Aplicados 21 ClaseDocumento16 páginasSistemas de Control Aplicados 21 ClaseAlejandroAún no hay calificaciones
- Sistemas de Control Aplicados 23 ClaseDocumento15 páginasSistemas de Control Aplicados 23 ClaseAlejandroAún no hay calificaciones
- Informe #3 - TPP - MBMBDocumento17 páginasInforme #3 - TPP - MBMBAlejandroAún no hay calificaciones
- Sistemas de Control Aplicados 20 ClaseDocumento13 páginasSistemas de Control Aplicados 20 ClaseAlejandroAún no hay calificaciones
- Estudio Experimental de La Transferencia de Calor en Bancos de TubosDocumento128 páginasEstudio Experimental de La Transferencia de Calor en Bancos de TubosLuis Miguel Mamani ApazaAún no hay calificaciones
- Instrumentación: Práctica 1Documento6 páginasInstrumentación: Práctica 1Ignacio MoránAún no hay calificaciones
- Potencia Requerida Por Las BombasDocumento8 páginasPotencia Requerida Por Las BombasAlejandroAún no hay calificaciones
- Práctica 3 TPP Turbina de VaporDocumento60 páginasPráctica 3 TPP Turbina de VaporAlejandroAún no hay calificaciones
- Calculadora FrigoríficaDocumento2 páginasCalculadora FrigoríficaAlejandroAún no hay calificaciones
- Determinación de Errores ExperimentalesDocumento19 páginasDeterminación de Errores ExperimentalesJorgeAún no hay calificaciones
- 2 DoDocumento4 páginas2 DoCamila Nelida BernabeAún no hay calificaciones
- Proyecto 1 Lavadora FinalDocumento32 páginasProyecto 1 Lavadora FinalGustavo Chavez100% (1)
- Analisis Gato MecanicoDocumento3 páginasAnalisis Gato MecanicoMartin Ruiz Maldonado0% (2)
- Ensayo PDT 1 MatematicaDocumento15 páginasEnsayo PDT 1 MatematicaFrancisco Pérez ValenciaAún no hay calificaciones
- Meei - Apuntes TRTDocumento13 páginasMeei - Apuntes TRTJulian LPLAún no hay calificaciones
- Tarea 1 de MetodologiaDocumento5 páginasTarea 1 de MetodologiaManuelqAún no hay calificaciones
- ACTIVIDADocumento22 páginasACTIVIDACristian CamposAún no hay calificaciones
- Formulario Proyecto de Ingeniería (2) - ÓnixDocumento17 páginasFormulario Proyecto de Ingeniería (2) - ÓnixSelene SequeiraAún no hay calificaciones
- 16Documento8 páginas16carlosronquillo75% (4)
- CircuitosDocumento8 páginasCircuitosAnthony LLayqui LazoAún no hay calificaciones
- PC-1 Estadistica Inferencial (UNI-FC)Documento12 páginasPC-1 Estadistica Inferencial (UNI-FC)Andro Erick Valero MedinaAún no hay calificaciones
- MRU y MRUVDocumento1 páginaMRU y MRUVdaniel alexanderAún no hay calificaciones
- Simulacion PromodelDocumento57 páginasSimulacion PromodelMiguelChoqueLandivarAún no hay calificaciones
- Taller Colaborativo 2Documento3 páginasTaller Colaborativo 2JuliAn NavarRoAún no hay calificaciones
- TEMA31-Lechos BacterianosDocumento20 páginasTEMA31-Lechos BacterianosGuillermo García HernándezAún no hay calificaciones
- 05 Desafios ENE 2018Documento18 páginas05 Desafios ENE 2018Felipe Almada OrtegaAún no hay calificaciones
- Estatica ArmadurasDocumento5 páginasEstatica ArmadurasDelcioTR100% (4)
- T. Practico N°01 NatacionDocumento5 páginasT. Practico N°01 NatacionDadi DSAún no hay calificaciones
- Dasein y Puesta en AbismoDocumento430 páginasDasein y Puesta en AbismoJineth Ardila ArizaAún no hay calificaciones
- Teorema de BayesDocumento18 páginasTeorema de BayesMaria MachadoAún no hay calificaciones
- FT 950-EsDocumento132 páginasFT 950-Es10sd156Aún no hay calificaciones
- Mediciones Físicas Aplicadas en Un Experimento de Dimensiones FractalesDocumento6 páginasMediciones Físicas Aplicadas en Un Experimento de Dimensiones FractalesAngie ArroyaveAún no hay calificaciones
- PRACTICA RESUELTA r1Documento22 páginasPRACTICA RESUELTA r1Laura Margaret Salas SilesAún no hay calificaciones
- Manual Reporte ResidenciasDocumento7 páginasManual Reporte ResidenciasCarlos Hernandez RobleroAún no hay calificaciones
- Aq 12 2019-Ii UnmsmDocumento22 páginasAq 12 2019-Ii UnmsmmeryAún no hay calificaciones
- Clase2 SQLDocumento29 páginasClase2 SQLaaronAún no hay calificaciones
- Mantenimiento Preventivo A1Documento7 páginasMantenimiento Preventivo A1David ButrónAún no hay calificaciones
- Capitulo 11 GrooverDocumento85 páginasCapitulo 11 Groovermanu100% (1)
- Informe FinalDocumento8 páginasInforme FinalMatías Álvarez CáceresAún no hay calificaciones
- d.2. Cálculo de Trasvase - ReformuladoDocumento9 páginasd.2. Cálculo de Trasvase - ReformuladoLUIS_LIENDOAún no hay calificaciones