También podría gustarte
- Mantenimiento de sistemas auxiliares del motor de ciclo diésel. TMVG0409De EverandMantenimiento de sistemas auxiliares del motor de ciclo diésel. TMVG0409Aún no hay calificaciones
- Localización y Solución de ProblemasDocumento240 páginasLocalización y Solución de ProblemasWiLson Condori CalcinaAún no hay calificaciones
- Certificación de Motores Medianos CaterpillarDocumento35 páginasCertificación de Motores Medianos Caterpillargdar100% (4)
- Manual de DiéselDocumento115 páginasManual de DiéselMane Olvera100% (1)
- Libro Del Estudiante CDK0040Documento40 páginasLibro Del Estudiante CDK0040Juan Carlos Rivas100% (1)
- Actualizado - Calibracion de Valvula Inyector Motor c32 390 DLDocumento10 páginasActualizado - Calibracion de Valvula Inyector Motor c32 390 DLJose Miguel Castillo Sanchez100% (1)
- 3512C Ajuste de Los Inyectores de CombustibleDocumento6 páginas3512C Ajuste de Los Inyectores de CombustibleEsika Cyzone LbelAún no hay calificaciones
- ET Motor Participante 2013A PDFDocumento32 páginasET Motor Participante 2013A PDFMarcos Matias MedinaAún no hay calificaciones
- ARMADO DE CURSO DE MOTORES 3500 (Version 3)Documento83 páginasARMADO DE CURSO DE MOTORES 3500 (Version 3)Jose Mejias100% (2)
- C4.4 Bomba InyectoraDocumento4 páginasC4.4 Bomba InyectoraPabloMatiasC100% (2)
- DVR PDFDocumento20 páginasDVR PDFjulian sanchez100% (2)
- Caterpillar C11 12 07 2015 PDFDocumento14 páginasCaterpillar C11 12 07 2015 PDFCesar GongoraAún no hay calificaciones
- Guia de Motores CaterpillarDocumento4 páginasGuia de Motores CaterpillarRubén Carcausto QuispeAún no hay calificaciones
- Caterpillar Marine Controls Installation Guide (PDF, EnG, 7 MB) (091-130) .En - EsDocumento40 páginasCaterpillar Marine Controls Installation Guide (PDF, EnG, 7 MB) (091-130) .En - Esedgar luisAún no hay calificaciones
- 2019-07-19 Ejercicio Evaluacion Codigos 1000, 1180, 1510, 2160, 3010 Generadores C4 - 4 Revision001Documento34 páginas2019-07-19 Ejercicio Evaluacion Codigos 1000, 1180, 1510, 2160, 3010 Generadores C4 - 4 Revision001jordan navarro100% (6)
- Generador Cat c6.6Documento8 páginasGenerador Cat c6.6ricardoAún no hay calificaciones
- Motores Marinos CATDocumento86 páginasMotores Marinos CATJIMMY CHUNG PAIMA100% (4)
- 3116 Maintenance - En.esDocumento33 páginas3116 Maintenance - En.esEdgar MaldonadoAún no hay calificaciones
- Manual de Certificacion Motores 3500 CaterpillarDocumento31 páginasManual de Certificacion Motores 3500 Caterpillargdar100% (7)
- Motores Electronicos y Controles V2-0Documento82 páginasMotores Electronicos y Controles V2-0Stalin Paul Rodriguez Leon100% (2)
- Motor Generador Volvo Penta TAD1641GE 643hpDocumento2 páginasMotor Generador Volvo Penta TAD1641GE 643hpLázaro MartinAún no hay calificaciones
- Descripcion y Funcionamiento Del Motor Marino Caterpillar 3618Documento90 páginasDescripcion y Funcionamiento Del Motor Marino Caterpillar 3618Daniel NaVa RAún no hay calificaciones
- 3500 Esp TroubleshootingDocumento249 páginas3500 Esp TroubleshootingHeber100% (3)
- Modulos de Control Electrónico EcmDocumento10 páginasModulos de Control Electrónico EcmroqueAún no hay calificaciones
- Manual Del Estudiante Motores 3412CDocumento68 páginasManual Del Estudiante Motores 3412Cjoel100% (2)
- Libro Del Alumno Sistemas Electronicos de La Maquina FinalDocumento310 páginasLibro Del Alumno Sistemas Electronicos de La Maquina FinalClaudio Jofre Gordillo100% (4)
- Grupo Electrógeno Caterpillar 3412Documento11 páginasGrupo Electrógeno Caterpillar 3412Noelia GarcíaAún no hay calificaciones
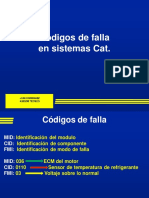
- Códigos de Falla en Sistemas CatDocumento14 páginasCódigos de Falla en Sistemas Catdarwin100% (4)
- Curso Basico Caterpillar-3500Documento32 páginasCurso Basico Caterpillar-3500Gabriel Andres Valencia100% (2)
- Curso Sistemas Electronicos Maquinas CaterpillarDocumento123 páginasCurso Sistemas Electronicos Maquinas CaterpillarJohnny Garcia100% (5)
- Curso de Sensores Caterpillar PDFDocumento11 páginasCurso de Sensores Caterpillar PDFadolfo88100% (1)
- Sicronización de ECM SincronizadorDocumento8 páginasSicronización de ECM Sincronizadorcristian100% (1)
- Torque de TornillosDocumento6 páginasTorque de Tornillosjose farias negrete100% (1)
- ECM Control MódulosDocumento17 páginasECM Control MódulosGustavo Vargas50% (2)
- Ajuste Superior (OBC)Documento20 páginasAjuste Superior (OBC)Carlos MontalvoAún no hay calificaciones
- 3412 - GGW - 35050-06 (2013)Documento18 páginas3412 - GGW - 35050-06 (2013)Jesus100% (1)
- Sistemas de inyección electrónica CaterpillarDocumento147 páginasSistemas de inyección electrónica CaterpillarconxatumadreAún no hay calificaciones
- Caterpillar 3500B PDFDocumento212 páginasCaterpillar 3500B PDFRoberto Tenemas100% (1)
- Manual Com Adapter 3Documento16 páginasManual Com Adapter 3Osvaldo VasquezAún no hay calificaciones
- Sistemas de Combustible en Motores ElectrónicosDocumento73 páginasSistemas de Combustible en Motores Electrónicosjhons24100% (31)
- Unidad 2-Control Electrónico de Motores PDFDocumento10 páginasUnidad 2-Control Electrónico de Motores PDFAnonymous NBWdLTgAún no hay calificaciones
- Caterpillar DiagramDocumento10 páginasCaterpillar DiagramManuel Blanco MendozaAún no hay calificaciones
- Caterpillar C15 SEGUNDA PARTE - En.esDocumento182 páginasCaterpillar C15 SEGUNDA PARTE - En.esjuan carlosAún no hay calificaciones
- Motor CATDocumento58 páginasMotor CATAurelio Hugo Ramos Mamani100% (1)
- Escaneo y Diagnostico - Motores Cat 3516C - RM Sur - 30.11.2019Documento10 páginasEscaneo y Diagnostico - Motores Cat 3516C - RM Sur - 30.11.2019davidph69100% (1)
- Material Del Estudiante (1) MOTORES FALLASDocumento62 páginasMaterial Del Estudiante (1) MOTORES FALLASIvan GomezAún no hay calificaciones
- Motor Caterpillar 3412 Diesel3Documento84 páginasMotor Caterpillar 3412 Diesel3Jhon Hever Benitez100% (3)
- Electricidad Avanzada Fining (Caterpillar)Documento107 páginasElectricidad Avanzada Fining (Caterpillar)Daniel Cisternas Cortes100% (1)
- Calibracion Motores 3500BDocumento20 páginasCalibracion Motores 3500BCarlos Terrones67% (3)
- Manual de ETDocumento37 páginasManual de ETAlcanfred Cte Bto100% (3)
- Localización de Fallas G-3500 EISDocumento23 páginasLocalización de Fallas G-3500 EISHamilton Sotero100% (1)
- PDF Manual 24v Caterpillar CompressDocumento29 páginasPDF Manual 24v Caterpillar CompressDavid LedeAún no hay calificaciones
- Curso de Iny. Elect - PP PDFDocumento69 páginasCurso de Iny. Elect - PP PDFVictor Hugo Huanca Bartolomé83% (6)
- Toaz - Info Manual 3412 Caterpillar PR - PDFDocumento77 páginasToaz - Info Manual 3412 Caterpillar PR - PDFRicardo Comesaña VicenteAún no hay calificaciones
- Lista Precios Motor Filter - Nov 26-12 - Actualización Abril 6-15 CorrectaDocumento7 páginasLista Precios Motor Filter - Nov 26-12 - Actualización Abril 6-15 CorrectachinnchinAún no hay calificaciones
- Boletin #3 Operacion de Sistema de Enfriamiento Motor Cat 3512Documento2 páginasBoletin #3 Operacion de Sistema de Enfriamiento Motor Cat 3512Eliecer DiazAún no hay calificaciones
- Calibrar Codigos de InyectorDocumento3 páginasCalibrar Codigos de InyectorCharles HornAún no hay calificaciones
- ZT18-90 Aif048 124Documento50 páginasZT18-90 Aif048 124Jose Joaquin Baeza Velueta100% (3)
- AtlascopoDocumento112 páginasAtlascopoiloalAún no hay calificaciones
- Flujo de refrigerante y enfriamiento de la celda de combustible en motores MEFIDocumento2 páginasFlujo de refrigerante y enfriamiento de la celda de combustible en motores MEFIEdgar MaldonadoAún no hay calificaciones
- D6 Group 30 Workshop Manual (161 200) .En - EsDocumento40 páginasD6 Group 30 Workshop Manual (161 200) .En - EsEdgar MaldonadoAún no hay calificaciones
- D6 Group 30 Workshop Manual (041 080) .En - EsDocumento41 páginasD6 Group 30 Workshop Manual (041 080) .En - EsEdgar MaldonadoAún no hay calificaciones
- Traducido del inglés al español - Códigos de avería motores Volvo PentaDocumento40 páginasTraducido del inglés al español - Códigos de avería motores Volvo PentaEdgar MaldonadoAún no hay calificaciones
- D6 Group 30 Workshop Manual (081 120) .En - EsDocumento40 páginasD6 Group 30 Workshop Manual (081 120) .En - EsEdgar MaldonadoAún no hay calificaciones
- Volvo Penta AQ125A - AQ145A Engine Unit Workshop Manual (En) (38-74) .En - EsDocumento37 páginasVolvo Penta AQ125A - AQ145A Engine Unit Workshop Manual (En) (38-74) .En - EsEdgar MaldonadoAún no hay calificaciones
- Volvo Ips Manual Del Usuario (001-042) .En - EsDocumento42 páginasVolvo Ips Manual Del Usuario (001-042) .En - EsEdgar Maldonado100% (1)
- Volvo Penta AQ125A - AQ145A Engine Unit Workshop Manual (En) (01-37) .En - EsDocumento37 páginasVolvo Penta AQ125A - AQ145A Engine Unit Workshop Manual (En) (01-37) .En - EsEdgar MaldonadoAún no hay calificaciones
- Motor Marino3126b.en - Es.en - EsDocumento33 páginasMotor Marino3126b.en - Es.en - EsEdgar MaldonadoAún no hay calificaciones
- 3116 Maintenance - En.esDocumento33 páginas3116 Maintenance - En.esEdgar MaldonadoAún no hay calificaciones
- D6 Group 30 Workshop Manual (001 040) .En - EsDocumento41 páginasD6 Group 30 Workshop Manual (001 040) .En - EsEdgar Maldonado100% (2)
- TT-1636 Installation Instructions - Kohler USB Utility - En.esDocumento4 páginasTT-1636 Installation Instructions - Kohler USB Utility - En.esEdgar Maldonado100% (1)
- Starting Systems LEBW4980-11.en - EsDocumento40 páginasStarting Systems LEBW4980-11.en - EsEdgar MaldonadoAún no hay calificaciones
- Cotizacion Planta KholerDocumento2 páginasCotizacion Planta KholerEdgar MaldonadoAún no hay calificaciones
- Trabajo Final de Uso de ContactoresDocumento10 páginasTrabajo Final de Uso de Contactoresricardob50d100% (1)
- Generadores KholerDocumento80 páginasGeneradores KholerEdgar MaldonadoAún no hay calificaciones
- Manual Kohler TP 6774 (001-040) .En - EsDocumento40 páginasManual Kohler TP 6774 (001-040) .En - EsEdgar Maldonado100% (2)
- Manual Kohler TP 6774 (001-040) .En - EsDocumento40 páginasManual Kohler TP 6774 (001-040) .En - EsEdgar Maldonado100% (2)
- Cursos RefrilavadorasDocumento33 páginasCursos RefrilavadorasEdgar MaldonadoAún no hay calificaciones
- Manual Kohler TP 6774 (041-080) .En - EsDocumento40 páginasManual Kohler TP 6774 (041-080) .En - EsEdgar MaldonadoAún no hay calificaciones
- Manual de Instalacion Generador Kholer 11kwDocumento56 páginasManual de Instalacion Generador Kholer 11kwEdgar MaldonadoAún no hay calificaciones
- Manual Kohler TP 6774 (081-120) .En - EsDocumento40 páginasManual Kohler TP 6774 (081-120) .En - EsEdgar Maldonado100% (1)
- Manual Kohler TP 6774 (041-080) .En - EsDocumento40 páginasManual Kohler TP 6774 (041-080) .En - EsEdgar MaldonadoAún no hay calificaciones
- Componetes Electronicos Cat (056-109) .En - EsDocumento54 páginasComponetes Electronicos Cat (056-109) .En - EsEdgar MaldonadoAún no hay calificaciones
- Signature Isx - En.esDocumento20 páginasSignature Isx - En.esEdgar MaldonadoAún no hay calificaciones
- Componetes Electronicos Cat (001-055) .En - EsDocumento55 páginasComponetes Electronicos Cat (001-055) .En - EsEdgar Maldonado100% (1)
- Manual Lavatorre Use and Care Guide COL Torres de Lavado V2 1Documento32 páginasManual Lavatorre Use and Care Guide COL Torres de Lavado V2 1Ana Virginia FernándezAún no hay calificaciones
- CUENTA DE COBRO No5Documento2 páginasCUENTA DE COBRO No5Edgar MaldonadoAún no hay calificaciones
- Componetes Electronicos Cat (056-109) .En - EsDocumento54 páginasComponetes Electronicos Cat (056-109) .En - EsEdgar MaldonadoAún no hay calificaciones
- Actividad Sopa de Letras Costos...Documento3 páginasActividad Sopa de Letras Costos...ñolo100% (1)
- Curriculum-Vitae Franklin Riera OlaDocumento4 páginasCurriculum-Vitae Franklin Riera OlaJunior SzcAún no hay calificaciones
- Planificación anual Filosofía-Psicología 2015Documento3 páginasPlanificación anual Filosofía-Psicología 2015Jose Alfredo RodriguezAún no hay calificaciones
- Guía para El Informe de FCT 4Documento7 páginasGuía para El Informe de FCT 4Dalys LucasAún no hay calificaciones
- Asignación Actividad 1 Módulo 2 - INFOTEPDocumento5 páginasAsignación Actividad 1 Módulo 2 - INFOTEPPaola DulucAún no hay calificaciones
- EmpowermentDocumento7 páginasEmpowermentluz perez100% (1)
- T1 Levantamiento Catastral - 1Documento72 páginasT1 Levantamiento Catastral - 1Jesus D. Hernandez QAún no hay calificaciones
- Riesgo ElectricoDocumento2 páginasRiesgo ElectricoTatiana CaicedoAún no hay calificaciones
- Diseños Organizacionales TradicionalesDocumento12 páginasDiseños Organizacionales TradicionalesEverAún no hay calificaciones
- Simulador químico Virtual LabDocumento2 páginasSimulador químico Virtual LabLaura PérezAún no hay calificaciones
- Recuperación MejoradaDocumento20 páginasRecuperación MejoradaMario Oscar Jauregui Caballero100% (7)
- Listado de Aspectos e Impactos AmbientalesDocumento1 páginaListado de Aspectos e Impactos AmbientalesDamalpa LopezAún no hay calificaciones
- Lista Escapes Moto (Ritmo-Spr) Abril 2019Documento16 páginasLista Escapes Moto (Ritmo-Spr) Abril 2019German MottoAún no hay calificaciones
- Analisis Vertical y Razones Financieras EcopetrolDocumento6 páginasAnalisis Vertical y Razones Financieras EcopetrolLuz Stela PeraltaAún no hay calificaciones
- Prevención de riesgos laborales con desengrasante químicoDocumento3 páginasPrevención de riesgos laborales con desengrasante químicoMontana MariaAún no hay calificaciones
- Bpa Buenas Prácticas Agricolas para Palma AceiteraDocumento8 páginasBpa Buenas Prácticas Agricolas para Palma AceiteraAndreaAún no hay calificaciones
- Decreto Supremo Que Modifica El Cronograma de Regularizacion Decreto Supremo N 018 2022 MTC 2119569 6Documento2 páginasDecreto Supremo Que Modifica El Cronograma de Regularizacion Decreto Supremo N 018 2022 MTC 2119569 6Paola FerrerAún no hay calificaciones
- FCC - U1 - 2do Grado - Sesion 04Documento5 páginasFCC - U1 - 2do Grado - Sesion 04Elena Campos Candela0% (1)
- Tabla de evaluación tecnológicaDocumento4 páginasTabla de evaluación tecnológicaLuis DiazAún no hay calificaciones
- BombasDocumento16 páginasBombasJavier DellOrto TagliapietraAún no hay calificaciones
- FT TabimaxDocumento3 páginasFT TabimaxGabo CastilloAún no hay calificaciones
- Poster Formaldehido 22 PDFDocumento1 páginaPoster Formaldehido 22 PDFLeandro GonzalezAún no hay calificaciones
- Metodología de La Investigación ASSTDocumento5 páginasMetodología de La Investigación ASSTAna Maria Diaz BelloAún no hay calificaciones
- Análisis de experimentos anidados y factoriales anidadosDocumento14 páginasAnálisis de experimentos anidados y factoriales anidadosjoselynAún no hay calificaciones
- app-transporte-android-analisis-financieroDocumento9 páginasapp-transporte-android-analisis-financieroISRAEL MANFRED CONDORI ROCHAAún no hay calificaciones
- Ejemplo de DatawarehouseDocumento4 páginasEjemplo de DatawarehouseGus MtzAún no hay calificaciones
- 3dsmax Modelado 06 IbeDocumento58 páginas3dsmax Modelado 06 Ibeb3rcebalAún no hay calificaciones
- LA NOCHE DE LOS CRISTALES DE 1938 Por Ingrid WeckertDocumento31 páginasLA NOCHE DE LOS CRISTALES DE 1938 Por Ingrid WeckertGustavo RassoAún no hay calificaciones
- Identificación y documentación requerida empresa contratistaDocumento2 páginasIdentificación y documentación requerida empresa contratistaJean Gatica RojasAún no hay calificaciones
- Cap III Estrategia Nacional Prevencion de La Violencia y El Delito PDF (Trabajo Grupal)Documento14 páginasCap III Estrategia Nacional Prevencion de La Violencia y El Delito PDF (Trabajo Grupal)Ceci BernalAún no hay calificaciones
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- LAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.De EverandLAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.Calificación: 4.5 de 5 estrellas4.5/5 (54)
- ¿Cómo piensan las máquinas?: Inteligencia artificial para humanosDe Everand¿Cómo piensan las máquinas?: Inteligencia artificial para humanosCalificación: 5 de 5 estrellas5/5 (1)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteCalificación: 1 de 5 estrellas1/5 (1)
- Proyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadDe EverandProyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadCalificación: 5 de 5 estrellas5/5 (1)
- Cómo hacer aviones de papel y otros objetos voladoresDe EverandCómo hacer aviones de papel y otros objetos voladoresAún no hay calificaciones
- Machine Learning y Deep Learning: Usando Python, Scikit y KerasDe EverandMachine Learning y Deep Learning: Usando Python, Scikit y KerasAún no hay calificaciones
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasDe EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Excel 2021 y 365 Paso a Paso: Paso a PasoDe EverandExcel 2021 y 365 Paso a Paso: Paso a PasoCalificación: 5 de 5 estrellas5/5 (12)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- El mito de la inteligencia artificial: Por qué las máquinas no pueden pensar como nosotros lo hacemosDe EverandEl mito de la inteligencia artificial: Por qué las máquinas no pueden pensar como nosotros lo hacemosCalificación: 5 de 5 estrellas5/5 (2)
- Curso básico de Python: La guía para principiantes para una introducción en la programación con PythonDe EverandCurso básico de Python: La guía para principiantes para una introducción en la programación con PythonAún no hay calificaciones
- EL PLAN DE NEGOCIOS DE UNA FORMA SENCILLA. La guía práctica que ayuda a poner en marcha nuevos proyectos e ideas empresariales.De EverandEL PLAN DE NEGOCIOS DE UNA FORMA SENCILLA. La guía práctica que ayuda a poner en marcha nuevos proyectos e ideas empresariales.Calificación: 4 de 5 estrellas4/5 (20)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónDe EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- Lógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosDe EverandLógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosCalificación: 3.5 de 5 estrellas3.5/5 (7)
- El dilema humano: Del Homo sapiens al Homo techDe EverandEl dilema humano: Del Homo sapiens al Homo techCalificación: 4 de 5 estrellas4/5 (1)
- Fundamentos de Programación: Diagramas de flujo, Diagramas N-S, Pseudocódigo y JavaDe EverandFundamentos de Programación: Diagramas de flujo, Diagramas N-S, Pseudocódigo y JavaAún no hay calificaciones
- Ciberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialDe EverandCiberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialCalificación: 4.5 de 5 estrellas4.5/5 (11)
- Design Thinking para principiantes: La innovación como factor para el éxito empresarialDe EverandDesign Thinking para principiantes: La innovación como factor para el éxito empresarialCalificación: 4.5 de 5 estrellas4.5/5 (10)
- Metodología básica de instrumentación industrial y electrónicaDe EverandMetodología básica de instrumentación industrial y electrónicaCalificación: 4 de 5 estrellas4/5 (12)
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosDe EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosCalificación: 5 de 5 estrellas5/5 (5)