También podría gustarte
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Lab2 Control de Sistema TermicoDocumento6 páginasLab2 Control de Sistema TermicoSergio Andrés RodríguezAún no hay calificaciones
- Labo N°1 - Sistema de ControlDocumento18 páginasLabo N°1 - Sistema de ControljuliocrispinAún no hay calificaciones
- Control automático aplicado: Prácticas de laboratorio 2da. EdiciónDe EverandControl automático aplicado: Prácticas de laboratorio 2da. EdiciónCalificación: 3.5 de 5 estrellas3.5/5 (5)
- Laboratorio1 Diagrama Bloques Simulink V2Documento8 páginasLaboratorio1 Diagrama Bloques Simulink V2AndresChangoluisaAún no hay calificaciones
- Control PlantaDocumento10 páginasControl Plantaanyelo_08Aún no hay calificaciones
- Sistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208De EverandSistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208Aún no hay calificaciones
- Laboratorio1 Diagrama Bloques SimulinkDocumento9 páginasLaboratorio1 Diagrama Bloques SimulinkMiguel CorreaAún no hay calificaciones
- Actividad Integradora Robotica Unidad 5Documento5 páginasActividad Integradora Robotica Unidad 5Alejandro GarciaAún no hay calificaciones
- Laboratorio5 Ajuste de Ganancia Lugar RaicesDocumento16 páginasLaboratorio5 Ajuste de Ganancia Lugar RaicesBryam FajardoAún no hay calificaciones
- Análisis y Diseño de Controladores en El TiempoDocumento23 páginasAnálisis y Diseño de Controladores en El Tiemporoberto roblesAún no hay calificaciones
- Laboratorio - 4Documento5 páginasLaboratorio - 4Maria Jose Aparicio MantillaAún no hay calificaciones
- Laboratorio1 Diagrama Bloques Simulink V2 (Realizado1) 2Documento14 páginasLaboratorio1 Diagrama Bloques Simulink V2 (Realizado1) 2Andres UchoAún no hay calificaciones
- Laboratorio de Control PidDocumento12 páginasLaboratorio de Control PidCarlos RamosAún no hay calificaciones
- Modelo MatematicosDocumento10 páginasModelo MatematicosJairo Alonso Ojeda AriasAún no hay calificaciones
- Informe Final 6 Sistemas de Control I ANALISIS DE ESTABILIDADDocumento9 páginasInforme Final 6 Sistemas de Control I ANALISIS DE ESTABILIDADCarlos Silva EspinozaAún no hay calificaciones
- ControladoresDocumento25 páginasControladoresutghstghsAún no hay calificaciones
- Tarea4 BrayanAguirre IgnacioArriagada CharlyContreras DanielVega 1Documento17 páginasTarea4 BrayanAguirre IgnacioArriagada CharlyContreras DanielVega 1Matias Eduardo Fuentealba PizarroAún no hay calificaciones
- Practica 4 PIDDocumento11 páginasPractica 4 PIDCristhiam Flores ZavalaAún no hay calificaciones
- Sistema de Control Eva4 Casi TerminadoDocumento22 páginasSistema de Control Eva4 Casi TerminadoNicolas HidalgoAún no hay calificaciones
- Laboratorio2 Control2Documento23 páginasLaboratorio2 Control20632021011Aún no hay calificaciones
- Lab5 ControlDocumento31 páginasLab5 ControlNoéArguetaAún no hay calificaciones
- Sanchez MorochoDocumento18 páginasSanchez MorochoWilson MorochoAún no hay calificaciones
- Trabajo Autonomo4 Sistemas de ControlDocumento5 páginasTrabajo Autonomo4 Sistemas de ControlEzequiel CalleAún no hay calificaciones
- Tarea 2 Control Automatico FullDocumento33 páginasTarea 2 Control Automatico FullSergio Enrique Berrios GonzalezAún no hay calificaciones
- Informe de ControlDocumento28 páginasInforme de ControlLuis Naranjo TipánAún no hay calificaciones
- Informe de Laboratorio 9 - Identificacion de SistemasDocumento31 páginasInforme de Laboratorio 9 - Identificacion de SistemasLuis Alexander Juarez MercedesAún no hay calificaciones
- L6 Implementación PID Control DigitalDocumento10 páginasL6 Implementación PID Control DigitalDIONEL ROPERO TORRESAún no hay calificaciones
- Reporte de Practica #8Documento9 páginasReporte de Practica #8Rafael Garcia IbarraAún no hay calificaciones
- Controladores Industriales 4Documento29 páginasControladores Industriales 4sebastian riquelme100% (2)
- Guia Lab 6 y 7 - 2021.2Documento12 páginasGuia Lab 6 y 7 - 2021.2Jim Fabián GonzalesAún no hay calificaciones
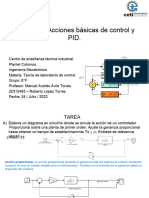
- TAREA 3.1 Acciones Básicas de Control y PIDDocumento20 páginasTAREA 3.1 Acciones Básicas de Control y PIDRoberto Lopez TorresAún no hay calificaciones
- Previo 7 TCyRDocumento5 páginasPrevio 7 TCyRJan GarcíaAún no hay calificaciones
- Informacion de Referencia ISE6 1 2Documento5 páginasInformacion de Referencia ISE6 1 2MatiasAún no hay calificaciones
- Guía de LaboratorioDocumento30 páginasGuía de LaboratorioYilber RoaAún no hay calificaciones
- Informe Lab 3Documento3 páginasInforme Lab 3jancarlos bermudezAún no hay calificaciones
- Guia Lab 02 CI 2020Documento43 páginasGuia Lab 02 CI 2020Liam Siles NuñezAún no hay calificaciones
- Sistema de Control de Posición de Bola y Barra Empleando Labview PDFDocumento8 páginasSistema de Control de Posición de Bola y Barra Empleando Labview PDFAbraham JaimeAún no hay calificaciones
- Etapa 3 - Grupo 17 - Edinson NuñezDocumento25 páginasEtapa 3 - Grupo 17 - Edinson Nuñezedinson nunez100% (1)
- Informe Final 3Documento9 páginasInforme Final 3Edwin ContrerasAún no hay calificaciones
- Practicas ControlDocumento11 páginasPracticas ControlFreddy RosasAún no hay calificaciones
- Informe Examen FinalDocumento15 páginasInforme Examen FinalGustavo CeccarelliAún no hay calificaciones
- Informe Laboratorios 4 y 5 ControlDocumento10 páginasInforme Laboratorios 4 y 5 ControlAlejandro Rincon MaldonadoAún no hay calificaciones
- Practica #5 PID Lab Sistemas de ControlDocumento12 páginasPractica #5 PID Lab Sistemas de ControlWalter MosqueraAún no hay calificaciones
- TA5Documento5 páginasTA5HM FERNANAún no hay calificaciones
- Controlador PIDDocumento5 páginasControlador PIDAlfredo TepanAún no hay calificaciones
- Prácticas CADocumento12 páginasPrácticas CAAvi Ramirez CervantesAún no hay calificaciones
- Guia VI - Sistemas de Control IDocumento3 páginasGuia VI - Sistemas de Control IIngridJasminTafurBecerraAún no hay calificaciones
- Práctica 9 - Controladores Proporcional e Integral.Documento3 páginasPráctica 9 - Controladores Proporcional e Integral.Jimmy Arias (JimmyStron)Aún no hay calificaciones
- Controles 3Documento14 páginasControles 3Humberto RanioloAún no hay calificaciones
- Proyecto CT II 20201 PDFDocumento9 páginasProyecto CT II 20201 PDFDaniel BoteroAún no hay calificaciones
- Actividad 2 AutomatizacionDocumento15 páginasActividad 2 AutomatizacionJonathan OmarAún no hay calificaciones
- Informe ControlDocumento4 páginasInforme Controldavid idroboAún no hay calificaciones
- Ca Act1 RQCDocumento12 páginasCa Act1 RQCMagaly BetancourtAún no hay calificaciones
- 100000I38N Sistemas de Control Digital Guía N 2 - Rev0001Documento7 páginas100000I38N Sistemas de Control Digital Guía N 2 - Rev0001marcoAún no hay calificaciones
- Factor de FormaDocumento43 páginasFactor de FormaLeoVelitaEspinozaAún no hay calificaciones
- IE3041 - Lab 8, GuíaDocumento3 páginasIE3041 - Lab 8, Guíaangelomachorro6Aún no hay calificaciones
- P3 CdiscretoDocumento7 páginasP3 CdiscretoLuis AmendañoAún no hay calificaciones
- Introducción A La Energía Solar Fotovoltaica PDFDocumento14 páginasIntroducción A La Energía Solar Fotovoltaica PDFFabian QuinteroAún no hay calificaciones
- 3 Informe Leer La FacturaDocumento11 páginas3 Informe Leer La FacturaFabian QuinteroAún no hay calificaciones
- Paper Control Lab 1 Fabian PDFDocumento8 páginasPaper Control Lab 1 Fabian PDFFabian QuinteroAún no hay calificaciones
- Laboratorio #4Documento5 páginasLaboratorio #4Fabian QuinteroAún no hay calificaciones
- Actividad 2Documento6 páginasActividad 2Fabian QuinteroAún no hay calificaciones
- Informe Comunicaciones MatlabDocumento5 páginasInforme Comunicaciones MatlabFabian QuinteroAún no hay calificaciones
- Modulacion AM Con MatlabDocumento5 páginasModulacion AM Con MatlabFabian QuinteroAún no hay calificaciones
- Taller Tipo Examen Sistemas de Comunicaciones I - 2018Documento2 páginasTaller Tipo Examen Sistemas de Comunicaciones I - 2018Fabian QuinteroAún no hay calificaciones
- Paper Laboratorio 5 B1 - IEDocumento6 páginasPaper Laboratorio 5 B1 - IEFabian QuinteroAún no hay calificaciones
- Automatizacion Planta Piloto Intercambiador Capitulo2Documento6 páginasAutomatizacion Planta Piloto Intercambiador Capitulo2Fabian QuinteroAún no hay calificaciones
- Antecedentes Históricos Del PERT CPMDocumento2 páginasAntecedentes Históricos Del PERT CPMJoca20Aún no hay calificaciones
- Guia Acc Edif PublicoDocumento140 páginasGuia Acc Edif PublicoTAMARA BENAVENT VIDALAún no hay calificaciones
- Contadores DigitalesDocumento7 páginasContadores DigitalesEspinosa Mendoza Diana Lucero0% (1)
- Analisis Numerico Burde 9 Edicion EspañorDocumento22 páginasAnalisis Numerico Burde 9 Edicion EspañorRonaldo PoyónAún no hay calificaciones
- Semana 14 Clase ModulosRecursividad CRMDocumento16 páginasSemana 14 Clase ModulosRecursividad CRMYoshilu Yolanda Abregu CortesAún no hay calificaciones
- TC-COT-2022-024 - Ensayos de Laboratorio - Ing. Martin TorresDocumento1 páginaTC-COT-2022-024 - Ensayos de Laboratorio - Ing. Martin TorresChristian Martin Torres DelgadoAún no hay calificaciones
- 2 - 1 - 2 - Usando Tipos de Datos LOB en Bloques PLSQLDocumento42 páginas2 - 1 - 2 - Usando Tipos de Datos LOB en Bloques PLSQLel lecheroAún no hay calificaciones
- SondeoDocumento2 páginasSondeoDayan Cely100% (1)
- 18 Planos AcotadosDocumento28 páginas18 Planos AcotadoschoclogloriaAún no hay calificaciones
- Convocatoria 2009Documento289 páginasConvocatoria 2009JOSEAún no hay calificaciones
- Conociendo Al Mercado ForexDocumento49 páginasConociendo Al Mercado ForexHenry InfanteAún no hay calificaciones
- Cambio IPs MGW - MGU en MX-ONEDocumento5 páginasCambio IPs MGW - MGU en MX-ONEMoises ReznikAún no hay calificaciones
- GematríaDocumento3 páginasGematríaFelipe MosseAún no hay calificaciones
- Memorias RamDocumento14 páginasMemorias RamMarty Marioneta GutierrezAún no hay calificaciones
- Optimizador OracleDocumento34 páginasOptimizador OracleRoberto Porto Solano0% (1)
- Punta Lógica TTL CMOS InstructivoDocumento3 páginasPunta Lógica TTL CMOS InstructivoNicolas DominguezAún no hay calificaciones
- Practica 5 Electrónica de PotenciaDocumento4 páginasPractica 5 Electrónica de PotenciaSebastian CdlmAún no hay calificaciones
- CurpDocumento1 páginaCurpAXELAún no hay calificaciones
- Las TI y Su Relación Con La Creación de Valor - Una Aplicación Empírica en MéxicoDocumento24 páginasLas TI y Su Relación Con La Creación de Valor - Una Aplicación Empírica en MéxicoJulieta K GarciaAún no hay calificaciones
- Inteligencia de Negocios y Software de GestionDocumento6 páginasInteligencia de Negocios y Software de Gestionfrancisca nieto garciaAún no hay calificaciones
- Unidad 4 Comunicación EfectivaDocumento27 páginasUnidad 4 Comunicación EfectivazaydaAún no hay calificaciones
- Practica 8, Estudio Del TrabajoDocumento19 páginasPractica 8, Estudio Del Trabajofernando miguel torres zevallosAún no hay calificaciones
- Manual Odoo 9 POSMicromercadoDocumento27 páginasManual Odoo 9 POSMicromercadokamoniac100% (1)
- Guia PERT - CPMDocumento5 páginasGuia PERT - CPMwoodenlyAún no hay calificaciones
- PAUTA DE EVALUACI+ôN DE JUEGODocumento2 páginasPAUTA DE EVALUACI+ôN DE JUEGOJoseline Medel Briones100% (1)
- Traduccion ARIESDocumento285 páginasTraduccion ARIESJerry Rdz88% (8)
- Homo TuristicusDocumento26 páginasHomo TuristicusMarianaBiancoAún no hay calificaciones
- Craft004 Instrucciones de Armado de Las Manualidades en Foamy Fieltro y Otros MaterialesDocumento4 páginasCraft004 Instrucciones de Armado de Las Manualidades en Foamy Fieltro y Otros MaterialesIme GuzmanAún no hay calificaciones
- Manual Del Usuario Centrales de DeteccioDocumento4 páginasManual Del Usuario Centrales de DeteccioJesucristoAún no hay calificaciones