También podría gustarte
- 4.2 Modos de Control Aplicados en InstrumentaciónDocumento11 páginas4.2 Modos de Control Aplicados en InstrumentaciónJung Angy Lee100% (1)
- Manual ElectrotecniaDocumento13 páginasManual ElectrotecniaWalter Enrique BocelAún no hay calificaciones
- Informe Final SciiDocumento60 páginasInforme Final SciiLuis HerediaAún no hay calificaciones
- Inspección de Arnés y Línea de VidaDocumento1 páginaInspección de Arnés y Línea de VidaDemetria Snider67% (3)
- 4.1.5. Acción Proporcional e IntegralDocumento52 páginas4.1.5. Acción Proporcional e IntegraldanielAún no hay calificaciones
- Unidad 3Documento53 páginasUnidad 3abelino2Aún no hay calificaciones
- Reporte 8 IntegralDocumento16 páginasReporte 8 IntegralDavid HernandezAún no hay calificaciones
- Sistemas de Control Lazo CerradoDocumento36 páginasSistemas de Control Lazo CerradoMARRU. CAún no hay calificaciones
- Unidad 4. Modo de Control ProporcionalDocumento31 páginasUnidad 4. Modo de Control Proporcionalcristhian reyesAún no hay calificaciones
- 0 Sistemas de ControlDocumento48 páginas0 Sistemas de ControlCristian Martinez RamirezAún no hay calificaciones
- Conceptos Basicos de Control PidDocumento7 páginasConceptos Basicos de Control PidSergioAún no hay calificaciones
- Equipo 1 - UNIDAD 4 - Control On-Off y ProporcionalDocumento20 páginasEquipo 1 - UNIDAD 4 - Control On-Off y ProporcionalPako XrossAún no hay calificaciones
- Control Proporcional, Integral y DerivativoDocumento6 páginasControl Proporcional, Integral y DerivativoGery LópezAún no hay calificaciones
- Control ProporcionalDocumento20 páginasControl Proporcionaljuan camiloAún no hay calificaciones
- 4.2 Modos de Control Aplicados en InstrumentaciónDocumento19 páginas4.2 Modos de Control Aplicados en InstrumentaciónMartin GomezAún no hay calificaciones
- ControladoresDocumento15 páginasControladoresAntony TorrezAún no hay calificaciones
- 3.3 Control ProporcionalDocumento10 páginas3.3 Control ProporcionalKevin mejiaAún no hay calificaciones
- Controlador OffDocumento6 páginasControlador OffJhonathan CLAún no hay calificaciones
- Tipos de ControlDocumento5 páginasTipos de ControlYennifer Giselle MartinezAún no hay calificaciones
- PID - MijailDocumento9 páginasPID - MijailAlex GonzalesAún no hay calificaciones
- ControladoresDocumento17 páginasControladoresHugo CarhuallanquiAún no hay calificaciones
- Control AdoresDocumento16 páginasControl AdoresOnfireF SAún no hay calificaciones
- Modos de Control MDocumento21 páginasModos de Control MMariana Gim100% (1)
- Controladores ProporcionalesDocumento8 páginasControladores ProporcionalesKevin Alexis Toalombo BustamanteAún no hay calificaciones
- Modo de Control Proporcional y Proporcional Con ReajusteDocumento6 páginasModo de Control Proporcional y Proporcional Con ReajusteNemesi De L'amourAún no hay calificaciones
- PID2Documento42 páginasPID2Kevin LopezAún no hay calificaciones
- Modos de ControladorDocumento23 páginasModos de ControladorMaria De Los Angeles De la CAún no hay calificaciones
- Controlador Proporcional IntegrativoDocumento9 páginasControlador Proporcional IntegrativoKevin FlorezAún no hay calificaciones
- Trabajo 3 Osward OlivaresDocumento23 páginasTrabajo 3 Osward OlivaresOOSWARDAún no hay calificaciones
- 03 - Porque Hace Falta Control ProporcionalDocumento15 páginas03 - Porque Hace Falta Control Proporcionalpep figueresAún no hay calificaciones
- Servo Mecanismos Rev ADocumento53 páginasServo Mecanismos Rev AScribd_TorontoAún no hay calificaciones
- Controladores Automaticos PDFDocumento35 páginasControladores Automaticos PDFLinktloztpAún no hay calificaciones
- Reporte de Investigación Unidad 4: ControladoresDocumento10 páginasReporte de Investigación Unidad 4: ControladoresIván OsorioAún no hay calificaciones
- Control Proporcional IntegralDocumento6 páginasControl Proporcional Integralfredery garciaAún no hay calificaciones
- Modo de Control Proporcional - InvestigacionDocumento5 páginasModo de Control Proporcional - InvestigacionDaniel GSAún no hay calificaciones
- Control Solo ProporcionalDocumento18 páginasControl Solo ProporcionalFrancisco GalindoAún no hay calificaciones
- Guia Control OnOff HisteresisDocumento8 páginasGuia Control OnOff HisteresisPablo SanchezAún no hay calificaciones
- 10 PidDocumento26 páginas10 PidTona Glez Herrera100% (1)
- Modos de Control MDocumento20 páginasModos de Control MRichardCumbicosAún no hay calificaciones
- Control ProporcionalDocumento6 páginasControl ProporcionalRoberth Martinez HaroAún no hay calificaciones
- Control AdoresDocumento10 páginasControl AdoresAngélica Rodríguez CarrascoAún no hay calificaciones
- Diagramas de BloquesDocumento5 páginasDiagramas de BloquesAna Fernanda De JesusAún no hay calificaciones
- EXA IC R.CarlosYañezBDocumento7 páginasEXA IC R.CarlosYañezBAlex SalinasAún no hay calificaciones
- Acciones Básicas de ControlDocumento13 páginasAcciones Básicas de ControljavichapAún no hay calificaciones
- Control ProporcionalDocumento13 páginasControl ProporcionalPlinio SuarezAún no hay calificaciones
- CONCEPTOS BASICOS DE CONTROL P, PI, PID y OtrosDocumento8 páginasCONCEPTOS BASICOS DE CONTROL P, PI, PID y OtrosViktOr GarciaAún no hay calificaciones
- Cuadro Comparativo TEORIA DE CONTROLDocumento4 páginasCuadro Comparativo TEORIA DE CONTROLRomanAún no hay calificaciones
- Taller Control de ProcesosDocumento2 páginasTaller Control de ProcesosFernando PadillaAún no hay calificaciones
- Control de NivelDocumento14 páginasControl de Nivelrginstalaciones2caAún no hay calificaciones
- Modo de Control ProporcionalDocumento7 páginasModo de Control ProporcionalMiguel ZepedaAún no hay calificaciones
- Controladores Tecnicas de ControlDocumento10 páginasControladores Tecnicas de ControlYervis Acevedo DiazAún no hay calificaciones
- Problemas y Acciones de ControlDocumento39 páginasProblemas y Acciones de ControlAlbertina OlivaresAún no hay calificaciones
- Tipo de Controladores en Servomecanismo y ServosDocumento6 páginasTipo de Controladores en Servomecanismo y ServosVictor Ivan M BAún no hay calificaciones
- Acciones de ControlDocumento55 páginasAcciones de ControlPaolo Andrés Pancho Ramírez0% (1)
- Acción de Control ProporcionalDocumento18 páginasAcción de Control Proporcionalingjuanc1971Aún no hay calificaciones
- Angela Serrano Sars CONTROLADORES P, I, D, PIDDocumento4 páginasAngela Serrano Sars CONTROLADORES P, I, D, PIDSinahi ScAún no hay calificaciones
- Modos de ControlDocumento17 páginasModos de ControlFanny Plaza100% (1)
- Practica 3 Control de La Planta de Nivel Por Medio de Un Pid (Javier Acosta Diego Bravo)Documento31 páginasPractica 3 Control de La Planta de Nivel Por Medio de Un Pid (Javier Acosta Diego Bravo)Sebastián VivasAún no hay calificaciones
- Unidad 4 InstrumentacionDocumento14 páginasUnidad 4 InstrumentacionJoselyn TorcuatoAún no hay calificaciones
- 2991-Texto Del Artículo-3923-1-10-20140403Documento9 páginas2991-Texto Del Artículo-3923-1-10-20140403Pedro Lucas Pires DamascenoAún no hay calificaciones
- Alimentacion y DeporteDocumento3 páginasAlimentacion y DeporteAndreaAún no hay calificaciones
- EVALEC 2 Cuaderno PDFDocumento16 páginasEVALEC 2 Cuaderno PDFPamela Allende VargasAún no hay calificaciones
- Borne de Conexión Fichas TecnicasDocumento6 páginasBorne de Conexión Fichas TecnicasKarina valenzuelaAún no hay calificaciones
- Resane de PlanchasDocumento6 páginasResane de Planchasfreddy.sucuytanaAún no hay calificaciones
- Algoritmos SVADocumento5 páginasAlgoritmos SVAEnrique Salvador Padial RamosAún no hay calificaciones
- Coeficientes Especiales de Correlación Est-IDocumento38 páginasCoeficientes Especiales de Correlación Est-IMariana Rivas Guardia100% (1)
- Prospecto de Guia Didactica Quimica-1Documento79 páginasProspecto de Guia Didactica Quimica-1Benito VillacisAún no hay calificaciones
- Biografia de Agustina RoblesDocumento8 páginasBiografia de Agustina RoblesFernando Cardenas RoblesAún no hay calificaciones
- Trptico 1Documento2 páginasTrptico 1Marito MoranAún no hay calificaciones
- Higado y Vias BiliaresDocumento31 páginasHigado y Vias Biliaresluis mumaAún no hay calificaciones
- Visión Integral (Introducción)Documento11 páginasVisión Integral (Introducción)Jose AraujoAún no hay calificaciones
- 2 Mandrioni AntropologiaDocumento38 páginas2 Mandrioni AntropologiaQuique BianchiAún no hay calificaciones
- Vitale, Joe - Mercadotecnia EspiritualDocumento73 páginasVitale, Joe - Mercadotecnia EspiritualJose Alvaro Becerra PérezAún no hay calificaciones
- Mecanica de Suelos y Diseño de PavimentosDocumento42 páginasMecanica de Suelos y Diseño de PavimentosvecanxAún no hay calificaciones
- Los Medios de ComunicacionDocumento2 páginasLos Medios de Comunicacionmonica lopezAún no hay calificaciones
- Cuaderno de La Oración Guia Practica Sobre La Oracion EficazDocumento95 páginasCuaderno de La Oración Guia Practica Sobre La Oracion EficazRv Jorge Gustavo HerreraAún no hay calificaciones
- T1 Back Panel - Ana Paula ParraDocumento4 páginasT1 Back Panel - Ana Paula ParraCarlos MorenoAún no hay calificaciones
- Ejercicios BioinformaticaDocumento9 páginasEjercicios BioinformaticaMailyn Stephany Porras GarciaAún no hay calificaciones
- Programa de Limpieza y Sanitizacion para Industria de Jugos de Fruta ElikathDocumento31 páginasPrograma de Limpieza y Sanitizacion para Industria de Jugos de Fruta Elikathabzg5Aún no hay calificaciones
- Actividad Análisis Numérico 3er Corte. Abraham PirelaDocumento16 páginasActividad Análisis Numérico 3er Corte. Abraham Pirelaabraham pirelaAún no hay calificaciones
- 2 Evaluacion Preguntas Tipo Test Resueltas Técnicas de Radiología EspecialDocumento7 páginas2 Evaluacion Preguntas Tipo Test Resueltas Técnicas de Radiología EspecialFernando Quintero Gómez100% (1)
- Actividad4 Álgebra LinealDocumento6 páginasActividad4 Álgebra LinealJesusJorgeRosasAún no hay calificaciones
- Bryan S Turner "Los Avances Recientes en La Teoría Del Cuerpo" (Resumen)Documento10 páginasBryan S Turner "Los Avances Recientes en La Teoría Del Cuerpo" (Resumen)BarbaMalatesta100% (1)
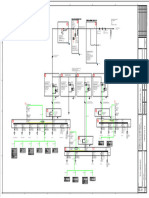
- Diagrama Unifilar Actualizado - Tr1Documento1 páginaDiagrama Unifilar Actualizado - Tr1miguelAún no hay calificaciones
- 1853 Mecanizado de PlasticosDocumento229 páginas1853 Mecanizado de Plasticosnicolas jarabaAún no hay calificaciones
- La Señalización TurísticaDocumento5 páginasLa Señalización TurísticaOperadora Puriq AimlessAún no hay calificaciones
- Aplicación Del Modelo Heckscher-OhlinDocumento20 páginasAplicación Del Modelo Heckscher-OhlinKem TellesAún no hay calificaciones