También podría gustarte
- Manual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)De EverandManual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)Calificación: 2 de 5 estrellas2/5 (1)
- UF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasDe EverandUF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasCalificación: 2.5 de 5 estrellas2.5/5 (3)
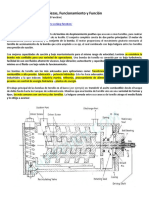
- Bombas de Tornillo - Sus Piezas - Funcionamiento y FunciónDocumento7 páginasBombas de Tornillo - Sus Piezas - Funcionamiento y FunciónRicardo ViloriaAún no hay calificaciones
- Instrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108De EverandInstrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108Calificación: 4.5 de 5 estrellas4.5/5 (8)
- UF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasDe EverandUF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasCalificación: 5 de 5 estrellas5/5 (1)
- Control y verificación de productos fabricados. FMEE0108De EverandControl y verificación de productos fabricados. FMEE0108Aún no hay calificaciones
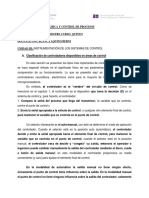
- Tipos de ControladoresDocumento10 páginasTipos de Controladoresefec7267% (9)
- Fabricación in situ vigas postensadas Puente San Julián IDocumento32 páginasFabricación in situ vigas postensadas Puente San Julián IMiguel Morgan Diaz100% (7)
- Tipos de ControladoresDocumento15 páginasTipos de ControladoresJose LopezAún no hay calificaciones
- Acertijos Matemáticos para Secundaria (I) SolucionesDocumento17 páginasAcertijos Matemáticos para Secundaria (I) SolucionesAnonymous wALlbbAún no hay calificaciones
- 3 Estrategias de ControlDocumento30 páginas3 Estrategias de ControlLuis Landeo Alva63% (8)
- Equipo y Herramienta de Pesca PruebaDocumento21 páginasEquipo y Herramienta de Pesca PruebaManuel CauichAún no hay calificaciones
- Eficiencia energética en las instalaciones de calefacción y acs en los edificios. ENAC0108De EverandEficiencia energética en las instalaciones de calefacción y acs en los edificios. ENAC0108Aún no hay calificaciones
- Control Semana 2 12Documento9 páginasControl Semana 2 12mikelitoo1Aún no hay calificaciones
- Modos de Control MDocumento21 páginasModos de Control MMariana Gim100% (1)
- Tarea 1 - ControladoresDocumento9 páginasTarea 1 - ControladoresHéctor SandovalAún no hay calificaciones
- Astm D2216 EspañolDocumento8 páginasAstm D2216 EspañolJoseph EspinozaAún no hay calificaciones
- Laboratorio de Instrumentacion y ControlDocumento16 páginasLaboratorio de Instrumentacion y ControlUriel CeballosAún no hay calificaciones
- ControladoresDocumento15 páginasControladoresAntony TorrezAún no hay calificaciones
- Acción de Control de Dos Posiciones o de Encendido y ApagadoDocumento5 páginasAcción de Control de Dos Posiciones o de Encendido y ApagadoEvelyn ArredondoAún no hay calificaciones
- Práctica Control de Temperatura de Un Reactor en Lazo Cerrado, Con Etapa de PrecalentamientoDocumento18 páginasPráctica Control de Temperatura de Un Reactor en Lazo Cerrado, Con Etapa de PrecalentamientoMichel Sánchez ColinAún no hay calificaciones
- Unidad 4 ControladoresDocumento18 páginasUnidad 4 ControladoresGlobos LugrimAún no hay calificaciones
- Resumen de Los Subtema 4.2 Al 4.5 ConcepcionDocumento13 páginasResumen de Los Subtema 4.2 Al 4.5 ConcepcionJose JimenezAún no hay calificaciones
- Modos de Control Aplicados en InstrumentaciónDocumento5 páginasModos de Control Aplicados en InstrumentaciónVictor Mares0% (1)
- Reporte de Investigación Unidad 4: ControladoresDocumento10 páginasReporte de Investigación Unidad 4: ControladoresIván OsorioAún no hay calificaciones
- PDF Reporte de Investigacion Unidad 4 ControladoresDocumento16 páginasPDF Reporte de Investigacion Unidad 4 ControladoresRicardo Hernandez bustosAún no hay calificaciones
- Control AdoresDocumento10 páginasControl AdoresAngélica Rodríguez CarrascoAún no hay calificaciones
- Controlador PidDocumento9 páginasControlador PidLuis Gabriel Martinez OrdoñezAún no hay calificaciones
- Informe Final SciiDocumento60 páginasInforme Final SciiLuis HerediaAún no hay calificaciones
- Calibración y Aplicación de Los Principios de Elevación y Supresión de Cero en Instrumentos Transmisores Eléctricos Del Laboratorio de Control de Procesos Químicos.Documento14 páginasCalibración y Aplicación de Los Principios de Elevación y Supresión de Cero en Instrumentos Transmisores Eléctricos Del Laboratorio de Control de Procesos Químicos.EldrysAún no hay calificaciones
- Control ProporcionalDocumento10 páginasControl ProporcionalKike DersúAún no hay calificaciones
- Problemas y Acciones de ControlDocumento39 páginasProblemas y Acciones de ControlAlbertina OlivaresAún no hay calificaciones
- Acciones Básicas de ControlDocumento13 páginasAcciones Básicas de ControljavichapAún no hay calificaciones
- T04 TapiazarateluisDocumento19 páginasT04 TapiazarateluisLuis TapiaAún no hay calificaciones
- Investigación Unidad 4 InstrumentacionDocumento27 páginasInvestigación Unidad 4 InstrumentacionDanna LopezAún no hay calificaciones
- Acciones Basicas de ControlDocumento36 páginasAcciones Basicas de Controlcarlitrosgimeneza100% (5)
- Instrumentacion MadisonDocumento41 páginasInstrumentacion MadisonMadison Arévalo LópezAún no hay calificaciones
- Control industrial: Introducción a los sistemas de control y tipos de acciones de controlDocumento13 páginasControl industrial: Introducción a los sistemas de control y tipos de acciones de controlfederico_farias_2Aún no hay calificaciones
- Controladores Tecnicas de ControlDocumento10 páginasControladores Tecnicas de ControlYervis Acevedo DiazAún no hay calificaciones
- Cadesimu Manual de de Funcionamiento2Documento21 páginasCadesimu Manual de de Funcionamiento2LeninAún no hay calificaciones
- Acciones Basicas de ControlDocumento18 páginasAcciones Basicas de ControlMiriam Vanessa Huanca CruzAún no hay calificaciones
- Acciones de Control ProporcionalDocumento4 páginasAcciones de Control ProporcionalLucssssAún no hay calificaciones
- PDFDocumento11 páginasPDFFlores KuAún no hay calificaciones
- Proyecto de Control AnalogoDocumento24 páginasProyecto de Control AnalogoMónik TelloAún no hay calificaciones
- Practica 8 Laboratorio de Sistemas de ControlDocumento12 páginasPractica 8 Laboratorio de Sistemas de ControlJanierAún no hay calificaciones
- Preinforme ControlDocumento7 páginasPreinforme ControlJuan CortésAún no hay calificaciones
- Esquema de Un Sistema de ControlDocumento9 páginasEsquema de Un Sistema de Controlmalcala__salazarAún no hay calificaciones
- 7.tipos de Control y SintoniaDocumento14 páginas7.tipos de Control y SintoniaSteven VargasAún no hay calificaciones
- Servo Mecanismos Rev ADocumento53 páginasServo Mecanismos Rev AScribd_TorontoAún no hay calificaciones
- Sistemas de Control Lazo Abierto y Lazo CerradoDocumento3 páginasSistemas de Control Lazo Abierto y Lazo CerradoJuan MiguelAún no hay calificaciones
- Sistemas de Control Lazo Abierto y Lazo CerradoDocumento3 páginasSistemas de Control Lazo Abierto y Lazo CerradoALAAN89Aún no hay calificaciones
- Control procesos dinámicaDocumento13 páginasControl procesos dinámicaYessica Von StreberAún no hay calificaciones
- Laboratorio 2 - Controladores de ProcesosDocumento6 páginasLaboratorio 2 - Controladores de Procesosgeiner peraltaAún no hay calificaciones
- Unidad 4 Acciones Bc3a1sicas de ControlDocumento37 páginasUnidad 4 Acciones Bc3a1sicas de ControlDaniel Eduardo JrzAún no hay calificaciones
- Banda ProporcionalDocumento13 páginasBanda ProporcionalGustavoBbtÜAún no hay calificaciones
- Introducción Al Control AutomáticoDocumento6 páginasIntroducción Al Control AutomáticoLisandro Antonio Sanchez SolarAún no hay calificaciones
- Control de Procesos QuimicosDocumento21 páginasControl de Procesos QuimicosRafael Quintero Sevilla100% (1)
- Tarea 4 - Martínez Rodríguez Luis EnriqueDocumento8 páginasTarea 4 - Martínez Rodríguez Luis Enriquecerdaperez13Aún no hay calificaciones
- Controladores: Sistemas de lazo abierto y cerradoDocumento17 páginasControladores: Sistemas de lazo abierto y cerradoRICARDO ROMEROAún no hay calificaciones
- ControladoresDocumento5 páginasControladoresJordi AlorAún no hay calificaciones
- Control Por Realimentacion o FeedbackDocumento27 páginasControl Por Realimentacion o FeedbackDiego Dt100% (2)
- Regulador de PID 2Documento10 páginasRegulador de PID 2Diego GuzmanAún no hay calificaciones
- Unidad 4 Diseño de CompensadoresDocumento13 páginasUnidad 4 Diseño de Compensadoresirma soriano silvaAún no hay calificaciones
- Unidad 4 (Recuperado Automáticamente)Documento12 páginasUnidad 4 (Recuperado Automáticamente)Flores KuAún no hay calificaciones
- Acción de Dos PosicionesDocumento9 páginasAcción de Dos PosicionesAngel BelloAún no hay calificaciones
- Estructuras GeologicasDocumento17 páginasEstructuras GeologicasJoselyn TorcuatoAún no hay calificaciones
- Ensayo U5 Geologia LaloDocumento4 páginasEnsayo U5 Geologia LaloJoselyn TorcuatoAún no hay calificaciones
- Ensayo U5 Geologia LaloDocumento4 páginasEnsayo U5 Geologia LaloJoselyn TorcuatoAún no hay calificaciones
- Instituto Tecnologico Superior de Villa La VentaDocumento25 páginasInstituto Tecnologico Superior de Villa La VentaJoselyn TorcuatoAún no hay calificaciones
- 5.1 Sistema de ElevacionDocumento8 páginas5.1 Sistema de ElevacionJoselyn TorcuatoAún no hay calificaciones
- Separadores Goyo ClaseDocumento2 páginasSeparadores Goyo ClaseJoselyn TorcuatoAún no hay calificaciones
- Fundamentos de PetroleraDocumento22 páginasFundamentos de PetroleraJoselyn TorcuatoAún no hay calificaciones
- Examen Unidad 2Documento2 páginasExamen Unidad 2Joselyn TorcuatoAún no hay calificaciones
- Tarea 2 Flujo Multifasico EXCEL CarlosSB 6PDocumento11 páginasTarea 2 Flujo Multifasico EXCEL CarlosSB 6PJoselyn TorcuatoAún no hay calificaciones
- PP EquipoDocumento22 páginasPP EquipoJoselyn TorcuatoAún no hay calificaciones
- Propiedades Del Agua CongenitaDocumento18 páginasPropiedades Del Agua CongenitaJoselyn TorcuatoAún no hay calificaciones
- Cálculo de Propiedades Pseudocríticas de Mezclas de Gases.Documento8 páginasCálculo de Propiedades Pseudocríticas de Mezclas de Gases.Joselyn TorcuatoAún no hay calificaciones
- Practica 1 InstrumentacionDocumento16 páginasPractica 1 InstrumentacionJoselyn TorcuatoAún no hay calificaciones
- Propues de Manejo de Residuos de Recortes de PerforaciónDocumento56 páginasPropues de Manejo de Residuos de Recortes de PerforaciónJoselyn Torcuato100% (1)
- Practica 1 InstrumentacionDocumento16 páginasPractica 1 InstrumentacionJoselyn TorcuatoAún no hay calificaciones
- Ejercicios de Herramientas EstadisticasDocumento18 páginasEjercicios de Herramientas EstadisticasJoselyn TorcuatoAún no hay calificaciones
- Cuestionario U6Documento13 páginasCuestionario U6Joselyn TorcuatoAún no hay calificaciones
- Tarea 1 PRESENTACION CARECESTAYDINA LZIBETDocumento6 páginasTarea 1 PRESENTACION CARECESTAYDINA LZIBETJoselyn TorcuatoAún no hay calificaciones
- Separación Gas-Líquido Ii (2023)Documento45 páginasSeparación Gas-Líquido Ii (2023)Joselyn TorcuatoAún no hay calificaciones
- Flujo Mult ClaseDocumento9 páginasFlujo Mult ClaseJoselyn TorcuatoAún no hay calificaciones
- RESUMEN U5-2-11 - MergedDocumento11 páginasRESUMEN U5-2-11 - MergedJoselyn TorcuatoAún no hay calificaciones
- Contratos de Servicio PemexDocumento32 páginasContratos de Servicio PemexJoselyn TorcuatoAún no hay calificaciones
- Formato de Evaluacion de Residencia Matrículas 2014 y AnterioresDocumento2 páginasFormato de Evaluacion de Residencia Matrículas 2014 y AnterioresJoselyn TorcuatoAún no hay calificaciones
- Cuestionario U6Documento13 páginasCuestionario U6Joselyn TorcuatoAún no hay calificaciones
- Tema 1.5 Al 1.8 DiapoDocumento24 páginasTema 1.5 Al 1.8 DiapoJoselyn TorcuatoAún no hay calificaciones
- Introduccion y 2.5.3 - 055202Documento11 páginasIntroduccion y 2.5.3 - 055202Joselyn TorcuatoAún no hay calificaciones
- Tabla FelixDocumento1 páginaTabla FelixJoselyn TorcuatoAún no hay calificaciones
- Ejercicio 1 PDFDocumento2 páginasEjercicio 1 PDFJoselyn TorcuatoAún no hay calificaciones
- Ejercicio 1 PDFDocumento2 páginasEjercicio 1 PDFJoselyn TorcuatoAún no hay calificaciones
- Clasificacion de PAEVDocumento17 páginasClasificacion de PAEVFredy RaulAún no hay calificaciones
- Ejemplos Flujo de Gas NaturalDocumento2 páginasEjemplos Flujo de Gas NaturalJose Barrientos OrtizAún no hay calificaciones
- Urea y CreatininaDocumento27 páginasUrea y CreatininaJamyl Javier EchegarayAún no hay calificaciones
- Epoxy Terrazo Matrix-A&BDocumento2 páginasEpoxy Terrazo Matrix-A&BdiegoAún no hay calificaciones
- Tecno 2Documento63 páginasTecno 2Lean MirandaAún no hay calificaciones
- Viii-Introduccion A Cartas Asm Reducido Quinta ParteDocumento14 páginasViii-Introduccion A Cartas Asm Reducido Quinta ParteunEstudianteMasAún no hay calificaciones
- DJI Mavic 2 Enterprise DualDocumento3 páginasDJI Mavic 2 Enterprise DualSergio CaballeroAún no hay calificaciones
- Numero 49Documento38 páginasNumero 49maria__luceroAún no hay calificaciones
- Mantenimiento de Cámaras de Refrigeración y Congelación.Documento23 páginasMantenimiento de Cámaras de Refrigeración y Congelación.LuisAlbertoMartínezAún no hay calificaciones
- Cómo Invertir Rentablemente en CompresoresDocumento104 páginasCómo Invertir Rentablemente en CompresoresAldref78Aún no hay calificaciones
- AlgoritmosDocumento4 páginasAlgoritmosJorge YpAún no hay calificaciones
- El trasvase de oxígeno entre Hb y Mb gracias al hierro (FeDocumento6 páginasEl trasvase de oxígeno entre Hb y Mb gracias al hierro (FeCelia MartinezAún no hay calificaciones
- El TornoDocumento25 páginasEl TornoNorbertoEsparzaAún no hay calificaciones
- Informe 2do Control IbuprofenoDocumento11 páginasInforme 2do Control IbuprofenoKarla Quiñones RufinoAún no hay calificaciones
- No13 Grado 6 Caracterizacion de Una Variable CualitativaDocumento6 páginasNo13 Grado 6 Caracterizacion de Una Variable Cualitativadeciret fandino gameroAún no hay calificaciones
- PrefisiologiaDocumento17 páginasPrefisiologiaEnrique Alfonso Salinas HurtadoAún no hay calificaciones
- 4.3 Celdas Combustible Alcohol DirectoDocumento23 páginas4.3 Celdas Combustible Alcohol DirectoRonald Leandro GuzmanAún no hay calificaciones
- TALLER IC y PHDocumento4 páginasTALLER IC y PHlocoflow100% (1)
- HospAislaDocumento14 páginasHospAislaJorge Armando Lezama GavanchoAún no hay calificaciones
- Cuestionario Gestion de La ProduccionDocumento4 páginasCuestionario Gestion de La ProduccionAnonymous 0Qs8nkeZokAún no hay calificaciones
- Cónicas y CuádricasDocumento16 páginasCónicas y CuádricasFanny Algo100% (1)
- GestarDocumento21 páginasGestarAngel VidalAún no hay calificaciones
- Geometria Descriptiva-Unidad 3 y 4Documento25 páginasGeometria Descriptiva-Unidad 3 y 4Yorman MoralesAún no hay calificaciones
- Informe Tecnico Post Voladura 15Documento9 páginasInforme Tecnico Post Voladura 15Marcos MonfortAún no hay calificaciones
- 02 - Unidad I - Módulo DTE1 - CadesimuDocumento13 páginas02 - Unidad I - Módulo DTE1 - CadesimuFede BerniAún no hay calificaciones