También podría gustarte
- ControladoresDocumento95 páginasControladoresMicaela Guzman BolivarAún no hay calificaciones
- Modos de Control MDocumento21 páginasModos de Control MMariana Gim100% (1)
- Unidad 4. Modo de Control ProporcionalDocumento31 páginasUnidad 4. Modo de Control Proporcionalcristhian reyesAún no hay calificaciones
- 03 - Porque Hace Falta Control ProporcionalDocumento15 páginas03 - Porque Hace Falta Control Proporcionalpep figueresAún no hay calificaciones
- 0 Sistemas de ControlDocumento48 páginas0 Sistemas de ControlCristian Martinez RamirezAún no hay calificaciones
- 4.2 Modos de Control Aplicados en InstrumentaciónDocumento11 páginas4.2 Modos de Control Aplicados en InstrumentaciónJung Angy Lee100% (1)
- Control PIDDocumento21 páginasControl PIDOscarAdarveLoresAún no hay calificaciones
- Modo de Control ProporcionalDocumento7 páginasModo de Control ProporcionalMiguel ZepedaAún no hay calificaciones
- Expo InstrumentaciónDocumento24 páginasExpo Instrumentaciónv5yxy47vw4Aún no hay calificaciones
- 4.2 Modos de Control Aplicados en InstrumentaciónDocumento19 páginas4.2 Modos de Control Aplicados en InstrumentaciónMartin GomezAún no hay calificaciones
- 4.2.2 Control Proporcional: InstrumentaciónDocumento6 páginas4.2.2 Control Proporcional: InstrumentaciónStarkream28Aún no hay calificaciones
- Tipos de ControladoresDocumento10 páginasTipos de ControladoresCrisabel GAún no hay calificaciones
- 4.2 InstrumentacionDocumento11 páginas4.2 InstrumentacionRichard MedinaAún no hay calificaciones
- Control Solo ProporcionalDocumento18 páginasControl Solo ProporcionalFrancisco GalindoAún no hay calificaciones
- Prueba 2Documento50 páginasPrueba 2gisellescaAún no hay calificaciones
- Tipo de Controladores en Servomecanismo y ServosDocumento6 páginasTipo de Controladores en Servomecanismo y ServosVictor Ivan M BAún no hay calificaciones
- Acción de Control ProporcionalDocumento18 páginasAcción de Control Proporcionalingjuanc1971Aún no hay calificaciones
- Tipos de ControlDocumento5 páginasTipos de ControlYennifer Giselle MartinezAún no hay calificaciones
- Control ProporcionalDocumento20 páginasControl Proporcionaljuan camiloAún no hay calificaciones
- Tipos de Sistemas de Control Aplicados A ProcesosDocumento35 páginasTipos de Sistemas de Control Aplicados A Procesosdanielaherondale1357Aún no hay calificaciones
- Control Por Realimentacion o FeedbackDocumento27 páginasControl Por Realimentacion o FeedbackDiego Dt100% (2)
- Informe Final SciiDocumento60 páginasInforme Final SciiLuis HerediaAún no hay calificaciones
- Actividad 4 Control de 1,2 y 3 ElementosDocumento6 páginasActividad 4 Control de 1,2 y 3 ElementosAlvaro Alberto Teoba HernandezAún no hay calificaciones
- Controladores Por RetroalimentacionDocumento16 páginasControladores Por RetroalimentacionMoises MartinezAún no hay calificaciones
- TEORÍA DE CONTROL, UNIDAD VLLDocumento28 páginasTEORÍA DE CONTROL, UNIDAD VLLJocelyn TovarAún no hay calificaciones
- Unidad 5 - Sistemas de Medida e Regulación (Cast.)Documento15 páginasUnidad 5 - Sistemas de Medida e Regulación (Cast.)pedroAún no hay calificaciones
- Actividad 4 Control de 1,2 y 3 ElementosDocumento5 páginasActividad 4 Control de 1,2 y 3 ElementosAlvaro Alberto Teoba HernandezAún no hay calificaciones
- Controladores ProporcionalesDocumento8 páginasControladores ProporcionalesKevin Alexis Toalombo BustamanteAún no hay calificaciones
- Modos de ControlDocumento17 páginasModos de ControlFanny Plaza100% (1)
- Control ProporcionalDocumento10 páginasControl ProporcionalKike DersúAún no hay calificaciones
- Control AdoresDocumento10 páginasControl AdoresAngélica Rodríguez CarrascoAún no hay calificaciones
- Practica 5. On-OffDocumento10 páginasPractica 5. On-OffCelene LiraAún no hay calificaciones
- Controlador Proporcional IntegrativoDocumento9 páginasControlador Proporcional IntegrativoKevin FlorezAún no hay calificaciones
- ControladoresDocumento15 páginasControladoresAntony TorrezAún no hay calificaciones
- Reporte 8 IntegralDocumento16 páginasReporte 8 IntegralDavid HernandezAún no hay calificaciones
- Acciones de Control ProporcionalDocumento4 páginasAcciones de Control ProporcionalLucssssAún no hay calificaciones
- U4 IntegralDocumento16 páginasU4 IntegralCorrea Orta MiguelAún no hay calificaciones
- Tipos de ControlDocumento6 páginasTipos de ControlEdgar Iván Marcelo LópezAún no hay calificaciones
- Presentación Libreta Aesthetic Lila PastelDocumento5 páginasPresentación Libreta Aesthetic Lila PastelJonathan PerezAún no hay calificaciones
- Ajuste de ControladoresDocumento15 páginasAjuste de Controladoreschem.luisjimenezAún no hay calificaciones
- Taller Control de ProcesosDocumento2 páginasTaller Control de ProcesosFernando PadillaAún no hay calificaciones
- Controladores Automaticos PDFDocumento35 páginasControladores Automaticos PDFLinktloztpAún no hay calificaciones
- 3.3 Control ProporcionalDocumento10 páginas3.3 Control ProporcionalKevin mejiaAún no hay calificaciones
- PID - MijailDocumento9 páginasPID - MijailAlex GonzalesAún no hay calificaciones
- Tipos de ControladoresDocumento10 páginasTipos de ControladoresDaniel Amador0% (1)
- Equipo 1 - UNIDAD 4 - Control On-Off y ProporcionalDocumento20 páginasEquipo 1 - UNIDAD 4 - Control On-Off y ProporcionalPako XrossAún no hay calificaciones
- Control de Proceso LibroDocumento4 páginasControl de Proceso LibroDenis CZAún no hay calificaciones
- Controlador Proporcional VVDocumento4 páginasControlador Proporcional VVangela delgadoAún no hay calificaciones
- Control Proporcional, Integral y DerivativoDocumento6 páginasControl Proporcional, Integral y DerivativoGery LópezAún no hay calificaciones
- Modo de Control Proporcional y Proporcional Con ReajusteDocumento6 páginasModo de Control Proporcional y Proporcional Con ReajusteNemesi De L'amourAún no hay calificaciones
- Conceptos Basicos de Control PidDocumento7 páginasConceptos Basicos de Control PidSergioAún no hay calificaciones
- Control ProporcionalDocumento11 páginasControl ProporcionalFrankAún no hay calificaciones
- ControladoresDocumento69 páginasControladoresDeivid Quinde ConstanteAún no hay calificaciones
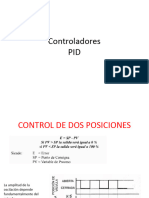
- Dos PosicionesDocumento5 páginasDos PosicionesLuis Felipe RodriguezAún no hay calificaciones
- 7 Tipos de Control y SintoníaDocumento13 páginas7 Tipos de Control y SintoníaGustavo CasasAún no hay calificaciones
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Errores en ModelaheDocumento1 páginaErrores en ModelaheRichardCumbicosAún no hay calificaciones
- Fichas de ProcesosDocumento2 páginasFichas de ProcesosRichardCumbicosAún no hay calificaciones
- Guia Virtual #6 para Practica de Laboratorio de Instrumentación Industrial IIDocumento15 páginasGuia Virtual #6 para Practica de Laboratorio de Instrumentación Industrial IIRichardCumbicosAún no hay calificaciones
- Perturbaciones Entrada de ProcesoDocumento1 páginaPerturbaciones Entrada de ProcesoRichardCumbicosAún no hay calificaciones
- Controlador Mimo No Lineal Tarea de RegulaciónDocumento1 páginaControlador Mimo No Lineal Tarea de RegulaciónRichardCumbicosAún no hay calificaciones
- Practica 4Documento25 páginasPractica 4RichardCumbicosAún no hay calificaciones
- Mullo Grace Practica Entorno TemperaturaDocumento13 páginasMullo Grace Practica Entorno TemperaturaRichardCumbicosAún no hay calificaciones
- Ejercicio 1 20220101 Cumbicos RichardDocumento10 páginasEjercicio 1 20220101 Cumbicos RichardRichardCumbicosAún no hay calificaciones
- Ejercicio 5 20220101 Cumbicos RichardDocumento13 páginasEjercicio 5 20220101 Cumbicos RichardRichardCumbicosAún no hay calificaciones
- Trabajo en Clase Equipos de ProcesosDocumento1 páginaTrabajo en Clase Equipos de ProcesosRichardCumbicosAún no hay calificaciones
- Ejercicio 3 20220101 Cumbicos RichardDocumento6 páginasEjercicio 3 20220101 Cumbicos RichardRichardCumbicosAún no hay calificaciones
- Ejercicio 2 20220101 Cumbicos RichardDocumento12 páginasEjercicio 2 20220101 Cumbicos RichardRichardCumbicosAún no hay calificaciones
- Ejercicio 4 20220101 Cumbicos RichardDocumento9 páginasEjercicio 4 20220101 Cumbicos RichardRichardCumbicosAún no hay calificaciones
- Planificacion de PistonDocumento3 páginasPlanificacion de PistonRichardCumbicosAún no hay calificaciones
- Tarea1 - PROGRAMACION - AWL - SUMBADocumento14 páginasTarea1 - PROGRAMACION - AWL - SUMBARichardCumbicosAún no hay calificaciones
- Ups - KT00019Documento202 páginasUps - KT00019Karla GabrielAún no hay calificaciones
- Tarea 3 - PROGRAMACION - FUP - SUMBADocumento17 páginasTarea 3 - PROGRAMACION - FUP - SUMBARichardCumbicosAún no hay calificaciones
- Ejercicio PLCDocumento2 páginasEjercicio PLCRichardCumbicosAún no hay calificaciones
- Tarea - 2 - PROGRAMACION KOP - SUMBADocumento20 páginasTarea - 2 - PROGRAMACION KOP - SUMBARichardCumbicosAún no hay calificaciones
- Tarea 5 Control de Motores TrifásicosDocumento14 páginasTarea 5 Control de Motores TrifásicosRichardCumbicosAún no hay calificaciones
- Tarea 9Documento11 páginasTarea 9Andtres C Pulloquinga CAún no hay calificaciones
- Programacion KOPDocumento14 páginasProgramacion KOPRichardCumbicosAún no hay calificaciones
- Arco ElectricoDocumento4 páginasArco ElectricoRichardCumbicosAún no hay calificaciones
- Torres Michael PruebaDocumento1 páginaTorres Michael PruebaRichardCumbicosAún no hay calificaciones
- 8 6 2021Documento16 páginas8 6 2021RichardCumbicosAún no hay calificaciones
- 28 05 2021Documento4 páginas28 05 2021RichardCumbicosAún no hay calificaciones
- Informe EjemploDocumento35 páginasInforme EjemploRichardCumbicosAún no hay calificaciones
- 2 Intr Accionam Maq ElectrDocumento9 páginas2 Intr Accionam Maq ElectrRichardCumbicosAún no hay calificaciones
- 3 Criterios Selec ComponentesDocumento36 páginas3 Criterios Selec ComponentesRichardCumbicosAún no hay calificaciones
- Tabulación Encuesta BeneficiariosDocumento4 páginasTabulación Encuesta BeneficiariosRichardCumbicosAún no hay calificaciones
- InformeDocumento5 páginasInformebryan lozanoAún no hay calificaciones
- Guia de Practica 07Documento3 páginasGuia de Practica 07Milita RamosAún no hay calificaciones
- Principio de Operación y Parámetros de Rendimiento de Inversores Alejandra AraqueDocumento3 páginasPrincipio de Operación y Parámetros de Rendimiento de Inversores Alejandra AraqueAlejandra AraqueAún no hay calificaciones
- 8 Lista de Precios Cercos Electricos Enero-2023 - VFDocumento3 páginas8 Lista de Precios Cercos Electricos Enero-2023 - VFjuan pablo segura pizarroAún no hay calificaciones
- Aplicacions Motion Na IndustriaDocumento54 páginasAplicacions Motion Na IndustriaYOHAN ALEXANDER SALAMANCA ARBOLEDAAún no hay calificaciones
- Enfoque Funcional y Estructural de Una ComputadoraDocumento1 páginaEnfoque Funcional y Estructural de Una Computadoracatalina velasquez suarezAún no hay calificaciones
- Ejercicios ResueltosDocumento21 páginasEjercicios ResueltosPedro ArayaAún no hay calificaciones
- TALLER1Documento3 páginasTALLER1Oswaldo Enrique Cassiani IriarteAún no hay calificaciones
- Examen Primer ParcialDocumento6 páginasExamen Primer ParcialMARCO ARCOSAún no hay calificaciones
- Ventajas y Desventajas de Windows 7Documento6 páginasVentajas y Desventajas de Windows 7Andres ArroyoAún no hay calificaciones
- Informe 06 de Circuitos ElectrónicosDocumento12 páginasInforme 06 de Circuitos ElectrónicosAndrés VásquezAún no hay calificaciones
- Lenguajes Automatas Programacion Sistemas PsDocumento31 páginasLenguajes Automatas Programacion Sistemas Pskmilo710Aún no hay calificaciones
- Catalogo Julio 2020Documento11 páginasCatalogo Julio 2020Andrés Saldaña SánchezAún no hay calificaciones
- Interruptores PotenciaDocumento196 páginasInterruptores PotenciaPablo GonzalesAún no hay calificaciones
- Como Hacer Una Instalación SilenciosaDocumento4 páginasComo Hacer Una Instalación SilenciosamarcohumerezAún no hay calificaciones
- Qué Es Un SGBDDocumento6 páginasQué Es Un SGBDCarmenAún no hay calificaciones
- Tutorial Instalaciã N Audaces 2Documento23 páginasTutorial Instalaciã N Audaces 2Lady SanchezAún no hay calificaciones
- Spiceworks (Administración de La Función Informática)Documento11 páginasSpiceworks (Administración de La Función Informática)José Cruz DelgadoAún no hay calificaciones
- Formato1 de Prueba Diagnostica IDocumento4 páginasFormato1 de Prueba Diagnostica Iweko poniente50% (2)
- 03 - Topologías de RedDocumento31 páginas03 - Topologías de RedBeatriz GrimaldiAún no hay calificaciones
- Creación de Aplicaciones PDFDocumento13 páginasCreación de Aplicaciones PDFAulaperu TicAún no hay calificaciones
- Clase 1 - Diseño Mecatrónico IIDocumento11 páginasClase 1 - Diseño Mecatrónico IIjirosiAún no hay calificaciones
- ISI504 Apunte Semana7 2022Documento21 páginasISI504 Apunte Semana7 2022Carlos Eduardo Pérez CastroAún no hay calificaciones
- Lista de Comandos CMD en WindowsDocumento6 páginasLista de Comandos CMD en WindowsJesus Antonio Ortega PeñaAún no hay calificaciones
- Informe 1 ArduinoDocumento10 páginasInforme 1 ArduinoGerardo BayasAún no hay calificaciones
- INFORME TICS Maquina Virtual UbuntuDocumento12 páginasINFORME TICS Maquina Virtual Ubuntunasly sanchezAún no hay calificaciones
- A08 RamosDocumento3 páginasA08 RamosJorgeAún no hay calificaciones
- Semana 06 Desarrollo de Aplicaciones WebDocumento7 páginasSemana 06 Desarrollo de Aplicaciones WebJose CastilloAún no hay calificaciones
- Ic-7300 - Manual Español FullDocumento172 páginasIc-7300 - Manual Español FullAlexander AeromodelistaAún no hay calificaciones
- Memoria USBDocumento15 páginasMemoria USBCayoja Anabe LeoAún no hay calificaciones