También podría gustarte
- Instrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108De EverandInstrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108Calificación: 4.5 de 5 estrellas4.5/5 (8)
- Comprobar pesadora: Revolucionando el control de calidad con la visión por computadoraDe EverandComprobar pesadora: Revolucionando el control de calidad con la visión por computadoraAún no hay calificaciones
- Actividad 4 Control de 1,2 y 3 ElementosDocumento6 páginasActividad 4 Control de 1,2 y 3 ElementosAlvaro Alberto Teoba HernandezAún no hay calificaciones
- Actividad 4 Control de 1,2 y 3 ElementosDocumento5 páginasActividad 4 Control de 1,2 y 3 ElementosAlvaro Alberto Teoba HernandezAún no hay calificaciones
- Tipos de ControladoresDocumento10 páginasTipos de ControladoresDaniel Amador0% (1)
- Tipos de ControlDocumento20 páginasTipos de ControlKatherine TorresAún no hay calificaciones
- Tipos de ControladoresDocumento10 páginasTipos de ControladoresCrisabel GAún no hay calificaciones
- Prueba 2Documento50 páginasPrueba 2gisellescaAún no hay calificaciones
- ControladoresDocumento95 páginasControladoresMicaela Guzman BolivarAún no hay calificaciones
- 7.2 Modos de Control Rev-00Documento36 páginas7.2 Modos de Control Rev-00Ma Laura ZweedykAún no hay calificaciones
- Modos de Control MDocumento21 páginasModos de Control MMariana Gim100% (1)
- Tipos de ControlDocumento5 páginasTipos de ControlYennifer Giselle MartinezAún no hay calificaciones
- Taller Control de ProcesosDocumento2 páginasTaller Control de ProcesosFernando PadillaAún no hay calificaciones
- 4.2 Modos de Control Aplicados en InstrumentaciónDocumento11 páginas4.2 Modos de Control Aplicados en InstrumentaciónJung Angy Lee100% (1)
- 4.2 Modos de Control Aplicados en InstrumentaciónDocumento19 páginas4.2 Modos de Control Aplicados en InstrumentaciónMartin GomezAún no hay calificaciones
- Capitulo 9 Regulacion AutomaticaDocumento5 páginasCapitulo 9 Regulacion AutomaticaFavio Cardoso VelascoAún no hay calificaciones
- Teoria de Control UlaDocumento12 páginasTeoria de Control Ulamalc1989Aún no hay calificaciones
- Acciones de ControlDocumento6 páginasAcciones de ControlRigoberto AEAún no hay calificaciones
- Retardo de ProcesoDocumento7 páginasRetardo de ProcesoAlejandro RiveraAún no hay calificaciones
- APUNTES Control de ProcesosDocumento67 páginasAPUNTES Control de ProcesosLuis Enrique Valencia100% (1)
- Control de Dos PosicionesDocumento14 páginasControl de Dos Posicionesluis charco100% (1)
- Regulacion en TurbinasDocumento6 páginasRegulacion en TurbinasMisael GómezAún no hay calificaciones
- Teoría de ControlDocumento12 páginasTeoría de ControlYajaira VidalAún no hay calificaciones
- Cuestionario Instrumentacion y ControlDocumento26 páginasCuestionario Instrumentacion y ControlJonathan Olivier Salgado Nesbet100% (5)
- Tarea 4 Control de Procesos - MoralesRuiz-310332 PDFDocumento6 páginasTarea 4 Control de Procesos - MoralesRuiz-310332 PDFAna Paola SámanoAún no hay calificaciones
- Entonación de Controladores PidDocumento6 páginasEntonación de Controladores Pidluces_hot21Aún no hay calificaciones
- Control Semana 2 12Documento9 páginasControl Semana 2 12mikelitoo1Aún no hay calificaciones
- Diapositivas CONTROL DE PROCESOS II UNIDAD I PDFDocumento58 páginasDiapositivas CONTROL DE PROCESOS II UNIDAD I PDFDina BolañosAún no hay calificaciones
- Proceso InestableDocumento5 páginasProceso InestableAngelQuispeAún no hay calificaciones
- Procesos DiscontinuosDocumento2 páginasProcesos DiscontinuosWinkel Malanio Perez SeguraAún no hay calificaciones
- Control de Gama DivididaDocumento7 páginasControl de Gama DivididaSergio HidalgoAún no hay calificaciones
- Clase 1Documento6 páginasClase 1Alejandro RojasAún no hay calificaciones
- Examen Control Lunes MontesDocumento6 páginasExamen Control Lunes MontesEliezer Silverio AcostaAún no hay calificaciones
- Control SelectivoDocumento6 páginasControl SelectivoJohn Gavilanez100% (1)
- TÉCNICAS DE CONTROL PopoopoDocumento24 páginasTÉCNICAS DE CONTROL Popoopoponzuponzu840Aún no hay calificaciones
- Sintonización de Controladores PidDocumento9 páginasSintonización de Controladores PidGreycy VenturaAún no hay calificaciones
- Tipos de Sistemas de Control Aplicados A ProcesosDocumento35 páginasTipos de Sistemas de Control Aplicados A Procesosdanielaherondale1357Aún no hay calificaciones
- Modos de Control en Sistemas de ControlDocumento90 páginasModos de Control en Sistemas de ControlLuis VargasAún no hay calificaciones
- Apuntes Control AutomaticoDocumento13 páginasApuntes Control Automaticofederico_farias_2Aún no hay calificaciones
- Tarea 4 - Martínez Rodríguez Luis EnriqueDocumento8 páginasTarea 4 - Martínez Rodríguez Luis Enriquecerdaperez13Aún no hay calificaciones
- UT6 ELEMENTOS FINALES Componentes TecnologicosDocumento33 páginasUT6 ELEMENTOS FINALES Componentes TecnologicosMaya GuerraAún no hay calificaciones
- Control de Gama DivididaDocumento7 páginasControl de Gama DivididaVanesska SerranoAún no hay calificaciones
- 4.1 Control de RelacionDocumento23 páginas4.1 Control de RelacionKarla Torres100% (1)
- Unidad 4. InstrumentacionDocumento65 páginasUnidad 4. InstrumentacionCortazar CesarAún no hay calificaciones
- Unidad 4 Diseño de CompensadoresDocumento13 páginasUnidad 4 Diseño de Compensadoresirma soriano silvaAún no hay calificaciones
- Control de Procesos QuimicosDocumento21 páginasControl de Procesos QuimicosRafael Quintero Sevilla100% (1)
- Parte Regulacion AutomaticaDocumento7 páginasParte Regulacion AutomaticaAngelica GonzalezAún no hay calificaciones
- 4.2 Control en CascadaDocumento3 páginas4.2 Control en CascadaPedro Manzanilla100% (1)
- Practica 8 Laboratorio de Sistemas de ControlDocumento12 páginasPractica 8 Laboratorio de Sistemas de ControlJanierAún no hay calificaciones
- Tema 7. Control de Procesos. VálvulasDocumento66 páginasTema 7. Control de Procesos. Válvulaslaura gaitan100% (2)
- Equipo 1 Problema OverrideDocumento5 páginasEquipo 1 Problema OverrideDavid Camilo Guerrero GonzalezAún no hay calificaciones
- Estrategias de Control de Procesos - 1Documento52 páginasEstrategias de Control de Procesos - 1lindafioAún no hay calificaciones
- 3.4 Control de ProcesosDocumento24 páginas3.4 Control de ProcesosgiusseppeAún no hay calificaciones
- Evaluacion Del Modulo de Control de NivelDocumento4 páginasEvaluacion Del Modulo de Control de NivelSusey Madelit Apaza MamaniAún no hay calificaciones
- Unidad 4. Aplicaciones de ControlDocumento26 páginasUnidad 4. Aplicaciones de ControlArnold Vasquez0% (1)
- Introducción Al Control AutomáticoDocumento6 páginasIntroducción Al Control AutomáticoLisandro Antonio Sanchez SolarAún no hay calificaciones
- Proyecto VALVULASDocumento29 páginasProyecto VALVULASOmar Yulian LeonAún no hay calificaciones
- T04 TapiazarateluisDocumento19 páginasT04 TapiazarateluisLuis TapiaAún no hay calificaciones
- Equilibrios de Fases y Transiciones de Fases: Parte IDe EverandEquilibrios de Fases y Transiciones de Fases: Parte IAún no hay calificaciones
- Modelamiento y casos especiales de la cinética química heterogéneaDe EverandModelamiento y casos especiales de la cinética química heterogéneaCalificación: 3 de 5 estrellas3/5 (1)
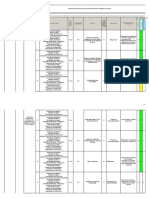
- Copia de Fssig021 v2 - Identificación de Peligros Evaluacion de Riesgos Oap ChancayDocumento57 páginasCopia de Fssig021 v2 - Identificación de Peligros Evaluacion de Riesgos Oap Chancaywilmer guerra peñaAún no hay calificaciones
- Practica 10 2014 - Densidad PDFDocumento25 páginasPractica 10 2014 - Densidad PDFCesar Omar VasquezAún no hay calificaciones
- TOPOGRAFIADocumento46 páginasTOPOGRAFIAWashington Merma Ccarhuarupay100% (1)
- Explicación Principios Ley 152 de 1994Documento2 páginasExplicación Principios Ley 152 de 1994leonardo yanezAún no hay calificaciones
- Cuestionarios AminoácidosDocumento4 páginasCuestionarios Aminoácidosilyu 10100% (2)
- Estudio Del AdjetivoDocumento6 páginasEstudio Del AdjetivoZUÑIGA'S LIBRERÍA Y TECNOLOGÍAAún no hay calificaciones
- Clase Cardio 2 Usmp 2019 PDFDocumento47 páginasClase Cardio 2 Usmp 2019 PDFrobertoAún no hay calificaciones
- Investigacion 1 FluidosDocumento5 páginasInvestigacion 1 FluidosVarela JulianAún no hay calificaciones
- Aprendiendo JlexDocumento17 páginasAprendiendo JlexCristian FiremanAún no hay calificaciones
- Programación Didáctica 2º Bachillerato. Economía de La Empresa. Navarra.Documento41 páginasProgramación Didáctica 2º Bachillerato. Economía de La Empresa. Navarra.pepita1979Aún no hay calificaciones
- Métodos de Estudio Estudio de Tema y TopicoDocumento7 páginasMétodos de Estudio Estudio de Tema y TopicoHugo ArcuriAún no hay calificaciones
- 7 Al 10 de FebreroDocumento11 páginas7 Al 10 de FebreroXiomara Perea AlvarezAún no hay calificaciones
- Manual Crecl Bomberos EscobarDocumento104 páginasManual Crecl Bomberos EscobarCesar Rivas100% (5)
- Calculo de Presiones Del Yacimiento PDFDocumento9 páginasCalculo de Presiones Del Yacimiento PDFHernsMartinezAún no hay calificaciones
- TransformadoresDocumento24 páginasTransformadoresIan Rios F.Aún no hay calificaciones
- Fac 1Documento2 páginasFac 1lolo loopAún no hay calificaciones
- Principios Del MIPGDocumento2 páginasPrincipios Del MIPGCÉSAR SALCEDOAún no hay calificaciones
- Inglés 1 Unidades 1, 2 y de IntegraciónDocumento72 páginasInglés 1 Unidades 1, 2 y de IntegraciónjanetAún no hay calificaciones
- LactantesDocumento7 páginasLactantesLuis Lopez RevelesAún no hay calificaciones
- Primer Examen Parte Práctica B3Documento2 páginasPrimer Examen Parte Práctica B3Henry Díaz ManosalvaAún no hay calificaciones
- Wischmeier, W. H., and Smith, D.D. 1978 - ESPDocumento67 páginasWischmeier, W. H., and Smith, D.D. 1978 - ESPcarlos imbaquingoAún no hay calificaciones
- Ses-Mierc-Mat-Conocemos La División de Números DecimalesDocumento6 páginasSes-Mierc-Mat-Conocemos La División de Números DecimalesKattia Mishell Barrantes Saavedra100% (1)
- Corporeidad de La ManoDocumento2 páginasCorporeidad de La ManoJesicaAún no hay calificaciones
- Estrategia Regional de Cambio Climático AncashDocumento84 páginasEstrategia Regional de Cambio Climático AncashBryanMendezReynosoAún no hay calificaciones
- La Linguistica de Eugenio Coseriu. Aport PDFDocumento25 páginasLa Linguistica de Eugenio Coseriu. Aport PDFPedro Elías RincónAún no hay calificaciones
- Drogueria Farma Éxito Sas 1Documento11 páginasDrogueria Farma Éxito Sas 1MARIA CAÑASAún no hay calificaciones
- Formato UniversalDocumento1 páginaFormato UniversalAlejandra MoránAún no hay calificaciones
- Zonificacion Ecologica Economica OllerosDocumento72 páginasZonificacion Ecologica Economica OllerosNilton Freddy Osorio MejiaAún no hay calificaciones
- SC1073 2022 2015 06321 01Documento42 páginasSC1073 2022 2015 06321 01Laura Moreno RestrepoAún no hay calificaciones
- ES - Asamblea Regional Del 2022 Busquen La Paz Sábado MañanaDocumento31 páginasES - Asamblea Regional Del 2022 Busquen La Paz Sábado MañanaDiego FernandezAún no hay calificaciones