También podría gustarte
- Controlador PIDDocumento10 páginasControlador PIDFiliberto Tlalpa ValdezAún no hay calificaciones
- Control PID para Un Motor DC Controlado Por ArmaduraDocumento17 páginasControl PID para Un Motor DC Controlado Por ArmaduraRicharson OchoaAún no hay calificaciones
- Practica 10 Sistemas de ControlDocumento15 páginasPractica 10 Sistemas de ControlluisalfonsootalvaropaezAún no hay calificaciones
- Modos de ControlDocumento17 páginasModos de ControlFanny Plaza100% (1)
- Sistemas de ControlDocumento21 páginasSistemas de Controlsaint1386Aún no hay calificaciones
- Informe Proyecto Final Teoria de Control IDocumento9 páginasInforme Proyecto Final Teoria de Control IFanny FloresAún no hay calificaciones
- ControladoresDocumento15 páginasControladoresAntony TorrezAún no hay calificaciones
- Informe Examen FinalDocumento15 páginasInforme Examen FinalGustavo CeccarelliAún no hay calificaciones
- 1 Unidad Conceptos Básicos de ControlDocumento9 páginas1 Unidad Conceptos Básicos de ControlluizAún no hay calificaciones
- Lectura Clase 1 UT1Documento10 páginasLectura Clase 1 UT1C. Ponce F.Aún no hay calificaciones
- Investigacion Documental Unidad 2 Control 2Documento10 páginasInvestigacion Documental Unidad 2 Control 2Miguel GarciaAún no hay calificaciones
- Diagrama de BloquesDocumento12 páginasDiagrama de BloquesNorberto SisoAún no hay calificaciones
- Diseño de CompensadoresDocumento22 páginasDiseño de Compensadoresirma soriano silvaAún no hay calificaciones
- Control Avanzado Lab2 InformeDocumento20 páginasControl Avanzado Lab2 InformeBranco Costa OrtegaAún no hay calificaciones
- Controladores AutomaticosDocumento10 páginasControladores AutomaticoslourdesreginagimenezAún no hay calificaciones
- Control ProporcionalDocumento11 páginasControl ProporcionalFrankAún no hay calificaciones
- P9 ICI Hernandez Gonzalez Karla Alejandra Ju1416Documento6 páginasP9 ICI Hernandez Gonzalez Karla Alejandra Ju1416Arthur Santiago TostadoAún no hay calificaciones
- Introducción A Los Controladores PIDDocumento24 páginasIntroducción A Los Controladores PIDVictor ReyesAún no hay calificaciones
- Sistema de ControlDocumento10 páginasSistema de ControlArismendy Estevez Nuñez100% (1)
- Análisis y Diseño de Controladores en El TiempoDocumento23 páginasAnálisis y Diseño de Controladores en El Tiemporoberto roblesAún no hay calificaciones
- Aplicación de Controlador PD A Planta de Segundo OrdenDocumento8 páginasAplicación de Controlador PD A Planta de Segundo OrdenKevin HerreraAún no hay calificaciones
- PID2Documento42 páginasPID2Kevin LopezAún no hay calificaciones
- Sistema de Control Eva4 Casi TerminadoDocumento22 páginasSistema de Control Eva4 Casi TerminadoNicolas HidalgoAún no hay calificaciones
- Analogica Control PIDDocumento33 páginasAnalogica Control PIDSandra ChachaAún no hay calificaciones
- PD, Pi, PidDocumento8 páginasPD, Pi, PidAngel Garcia GalindoAún no hay calificaciones
- Unidad 1 - Introducción A Los Sistemas de ControlDocumento10 páginasUnidad 1 - Introducción A Los Sistemas de Controlangel9021Aún no hay calificaciones
- Acciones Basicas de ControlDocumento20 páginasAcciones Basicas de ControlrichardlivAún no hay calificaciones
- Teoria de ControlDocumento15 páginasTeoria de ControlGabriela Abigail Lazo de la CruzAún no hay calificaciones
- Regulación Preguntas ResueltasDocumento17 páginasRegulación Preguntas ResueltasAntonio MolaAún no hay calificaciones
- Angela Serrano Sars CONTROLADORES P, I, D, PIDDocumento4 páginasAngela Serrano Sars CONTROLADORES P, I, D, PIDSinahi ScAún no hay calificaciones
- CONTROLADORES y Acciones de ControlDocumento8 páginasCONTROLADORES y Acciones de ControlHaide GarciaAún no hay calificaciones
- Proyecto CT II 20201 PDFDocumento9 páginasProyecto CT II 20201 PDFDaniel BoteroAún no hay calificaciones
- Sistema de Control AndreaDocumento11 páginasSistema de Control AndreaAndrea RugamaAún no hay calificaciones
- Lab 12Documento17 páginasLab 12richard ccahuana laymeAún no hay calificaciones
- Unidad 4 Acciones Bc3a1sicas de ControlDocumento37 páginasUnidad 4 Acciones Bc3a1sicas de ControlDaniel Eduardo JrzAún no hay calificaciones
- Reporte de Investigación Unidad 4: ControladoresDocumento10 páginasReporte de Investigación Unidad 4: ControladoresIván OsorioAún no hay calificaciones
- Modos de ControlDocumento12 páginasModos de ControlAnonymous qjfLLSHo100% (1)
- Acciones de Control ProporcionalDocumento4 páginasAcciones de Control ProporcionalLucssssAún no hay calificaciones
- Informe Teoria de Control 3Documento19 páginasInforme Teoria de Control 3edison matiasAún no hay calificaciones
- 6cv1 García Aguilar Brian Controladores PidDocumento18 páginas6cv1 García Aguilar Brian Controladores PidChino MalverdeAún no hay calificaciones
- Cuad. Control I PDFDocumento67 páginasCuad. Control I PDFedu hermartAún no hay calificaciones
- Control PidDocumento18 páginasControl PidMiguelSalgadoAún no hay calificaciones
- Practica SERVOMECANISMO NEUMÁTICODocumento10 páginasPractica SERVOMECANISMO NEUMÁTICOClara CastilloAún no hay calificaciones
- Examen ControlDocumento4 páginasExamen ControlDavidGonzálezAún no hay calificaciones
- Control AdoresDocumento10 páginasControl AdoresAngélica Rodríguez CarrascoAún no hay calificaciones
- Tipos de ControladoresDocumento8 páginasTipos de ControladoresKathya Cano PeraltaAún no hay calificaciones
- Unidad 4 ControladoresDocumento18 páginasUnidad 4 ControladoresGlobos LugrimAún no hay calificaciones
- Instrumentacion MadisonDocumento41 páginasInstrumentacion MadisonMadison Arévalo LópezAún no hay calificaciones
- Control ProporcionalDocumento10 páginasControl ProporcionalKike DersúAún no hay calificaciones
- Diagrama de BloquesDocumento27 páginasDiagrama de BloquesMariel GTAún no hay calificaciones
- Bucla TípicaDocumento6 páginasBucla TípicaJuan David SandovalAún no hay calificaciones
- Estrategias de Control de ProcesosDocumento6 páginasEstrategias de Control de ProcesosChRiss CarvajalAún no hay calificaciones
- Sumativa 2 Laboratorio Control II Hermes ChavezDocumento26 páginasSumativa 2 Laboratorio Control II Hermes ChavezGlenda Ureña de ChavezAún no hay calificaciones
- Controlador Proporcional IntegrativoDocumento9 páginasControlador Proporcional IntegrativoKevin FlorezAún no hay calificaciones
- Conceptos Basicos de Control PidDocumento7 páginasConceptos Basicos de Control PidSergioAún no hay calificaciones
- Técnicas de Diseño de ControladoresDocumento4 páginasTécnicas de Diseño de ControladoresJavier OrtizAún no hay calificaciones
- Sistemas de Controlador ProporcionalDocumento5 páginasSistemas de Controlador ProporcionalRoberto Squertz LiveAún no hay calificaciones
- ControladoresDocumento32 páginasControladoresKelvin MartínezAún no hay calificaciones
- Informacion AceitesDocumento1 páginaInformacion AceitesEdgar Iván Marcelo LópezAún no hay calificaciones
- Unidad I Introducción A La Manufactura AvanzadaDocumento10 páginasUnidad I Introducción A La Manufactura AvanzadaEdgar Iván Marcelo LópezAún no hay calificaciones
- Estado de Arte - Equipo 2Documento14 páginasEstado de Arte - Equipo 2Edgar Iván Marcelo LópezAún no hay calificaciones
- Maquina ExpendedoraDocumento23 páginasMaquina ExpendedoraEdgar Iván Marcelo LópezAún no hay calificaciones
- Práctica 2. Mando Directo para Un Actuador de Simple EfectoDocumento10 páginasPráctica 2. Mando Directo para Un Actuador de Simple EfectoEdgar Iván Marcelo LópezAún no hay calificaciones
- Informacion GrasasDocumento1 páginaInformacion GrasasEdgar Iván Marcelo LópezAún no hay calificaciones
- Práctica 4. Mando Indirecto para Un Actuador de Simple Efecto y Uno de Doble EfectoDocumento11 páginasPráctica 4. Mando Indirecto para Un Actuador de Simple Efecto y Uno de Doble EfectoEdgar Iván Marcelo LópezAún no hay calificaciones
- Conceptos Básicos de TermodinámicaDocumento8 páginasConceptos Básicos de TermodinámicaEdgar Iván Marcelo LópezAún no hay calificaciones
- Justificación LevaDocumento1 páginaJustificación LevaEdgar Iván Marcelo LópezAún no hay calificaciones
- 1.3 Propiedades de Los Fluidos - PresentacionDocumento28 páginas1.3 Propiedades de Los Fluidos - PresentacionEdgar Iván Marcelo LópezAún no hay calificaciones
- 2.1 Medición de Presión - PresentacionDocumento19 páginas2.1 Medición de Presión - PresentacionEdgar Iván Marcelo LópezAún no hay calificaciones
- 1.3 Propiedades de Los Fluidos - PresentacionDocumento10 páginas1.3 Propiedades de Los Fluidos - PresentacionEdgar Iván Marcelo LópezAún no hay calificaciones
- Libreta de Apuntes Edgar Ivan Marcelo LopezDocumento49 páginasLibreta de Apuntes Edgar Ivan Marcelo LopezEdgar Iván Marcelo LópezAún no hay calificaciones
- CISIC2017 La Importancia de La InformaticaDocumento19 páginasCISIC2017 La Importancia de La InformaticaEdgar Iván Marcelo LópezAún no hay calificaciones
- Avance Proyecto Final Equipo 1Documento26 páginasAvance Proyecto Final Equipo 1Edgar Iván Marcelo LópezAún no hay calificaciones
- Serie de Ejercicios Propios ResueltosDocumento41 páginasSerie de Ejercicios Propios ResueltosEdgar Iván Marcelo LópezAún no hay calificaciones
- Manual para Vincular Los Datos A Tu Hoja de Excel en La Maquina de TrabajoDocumento4 páginasManual para Vincular Los Datos A Tu Hoja de Excel en La Maquina de TrabajoEdgar Iván Marcelo LópezAún no hay calificaciones
- Actividad 3 - U1 - MTC1008 Dinámica G1Documento5 páginasActividad 3 - U1 - MTC1008 Dinámica G1Edgar Iván Marcelo LópezAún no hay calificaciones
- Actividad Formulario Edgar Ivan MLDocumento5 páginasActividad Formulario Edgar Ivan MLEdgar Iván Marcelo LópezAún no hay calificaciones
- Experiment Template Format IEEEDocumento5 páginasExperiment Template Format IEEEEdgar Iván Marcelo LópezAún no hay calificaciones
- 1.1 Conceptos Basicos - PresentacionDocumento17 páginas1.1 Conceptos Basicos - PresentacionEdgar Iván Marcelo LópezAún no hay calificaciones
- A - 1.1 - Curva de Un Diodo EIMLDocumento7 páginasA - 1.1 - Curva de Un Diodo EIMLEdgar Iván Marcelo LópezAún no hay calificaciones
- PracticaDocumento3 páginasPracticaEdgar Iván Marcelo LópezAún no hay calificaciones
- Actividad 2, Entropia Edgar Ivan MLDocumento5 páginasActividad 2, Entropia Edgar Ivan MLEdgar Iván Marcelo LópezAún no hay calificaciones
- Actividad Leyes de Los Gases Ideales EIMLDocumento14 páginasActividad Leyes de Los Gases Ideales EIMLEdgar Iván Marcelo López100% (2)
- Actividad Leyes de Los Gases Ideales EIMLDocumento14 páginasActividad Leyes de Los Gases Ideales EIMLEdgar Iván Marcelo López100% (2)
- Evaluacion Diagnostica Circuitos Electricos EimlDocumento10 páginasEvaluacion Diagnostica Circuitos Electricos EimlEdgar Iván Marcelo López100% (1)
- Movimiento Rectilíneo Uniforme - MTC1008 Dinámica G1Documento1 páginaMovimiento Rectilíneo Uniforme - MTC1008 Dinámica G1Edgar Iván Marcelo LópezAún no hay calificaciones
- 5.2.1 Constitución Política de Los Estados Unidos MexicanosDocumento3 páginas5.2.1 Constitución Política de Los Estados Unidos MexicanosEdgar Iván Marcelo LópezAún no hay calificaciones
- El Estado Como Regulador Del DesarrolloDocumento4 páginasEl Estado Como Regulador Del DesarrolloEdgar Iván Marcelo LópezAún no hay calificaciones
- 01 - Información de Mantenimiento Atego WDB, 9BMDocumento2 páginas01 - Información de Mantenimiento Atego WDB, 9BMAngelica Puebla Labarca100% (1)
- Guia de Actividades y Rúbrica de Evaluación - Unidad 1 - Tarea 2 - Historia y Teorías de La AdministraciónDocumento7 páginasGuia de Actividades y Rúbrica de Evaluación - Unidad 1 - Tarea 2 - Historia y Teorías de La Administraciónana milena zuñiga gonzalezAún no hay calificaciones
- TopoDocumento9 páginasTopoVladimirIvanZavalaRiverosAún no hay calificaciones
- Informe de Laboratorio N°1Documento6 páginasInforme de Laboratorio N°1Karen NathaliaAún no hay calificaciones
- A - 3 Alianzas EstratégicasDocumento5 páginasA - 3 Alianzas EstratégicaspaoAún no hay calificaciones
- Naturales: CienciasDocumento84 páginasNaturales: CienciasCristina Micaela CasimiroAún no hay calificaciones
- Trabajo Final de Rocas II Mina ParedonesDocumento163 páginasTrabajo Final de Rocas II Mina ParedonesPool Antoni Peralta RodasAún no hay calificaciones
- Practica 3 - Certificado Medico ForenseDocumento6 páginasPractica 3 - Certificado Medico ForenseJuliana BrandãoAún no hay calificaciones
- Exámen Naturales EcosisemasDocumento4 páginasExámen Naturales Ecosisemaspedroaguedamiguel22Aún no hay calificaciones
- Ep3. AmefDocumento4 páginasEp3. AmefALEJANDRO LOZANO GORZOAún no hay calificaciones
- Bies-Lectura 1Documento15 páginasBies-Lectura 1Adriana TAún no hay calificaciones
- 1Documento6 páginas1brenda ruizAún no hay calificaciones
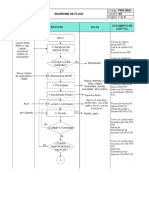
- Pro-Da01-Diagrama de Flujo V.03Documento3 páginasPro-Da01-Diagrama de Flujo V.03loida callisayaAún no hay calificaciones
- Causas de La Migración Interna en MéxicoDocumento3 páginasCausas de La Migración Interna en MéxicoERICKAún no hay calificaciones
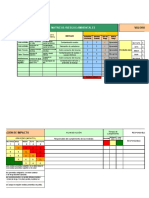
- MATRIZ de RIESGOS Ambientales EjemploDocumento3 páginasMATRIZ de RIESGOS Ambientales EjemploLiz M. Barahona ValladaresAún no hay calificaciones
- Modulo IV ZONIFICACIONDocumento14 páginasModulo IV ZONIFICACIONDavid Hugo Urzagaste GuzmanAún no hay calificaciones
- Boletín 45: Sociedad Ictiologíca Mexicana, A.CDocumento23 páginasBoletín 45: Sociedad Ictiologíca Mexicana, A.CSirma VegaAún no hay calificaciones
- Conceptos Básicos de Análisis Estructural-1Documento12 páginasConceptos Básicos de Análisis Estructural-1Wilson PanchanaAún no hay calificaciones
- 100 SociologosDocumento47 páginas100 SociologosWilmar OrtizAún no hay calificaciones
- Planeacion Programa Nacional de Convivencia EscolarDocumento33 páginasPlaneacion Programa Nacional de Convivencia EscolarNallely Solano100% (1)
- RT PCRDocumento4 páginasRT PCRMaria Del Mar FernándezAún no hay calificaciones
- Auditoria Ambiental Informe 631Documento15 páginasAuditoria Ambiental Informe 631wilfredo100% (1)
- 213T1004 Elizabeth Arias Osorio U1 A6Documento10 páginas213T1004 Elizabeth Arias Osorio U1 A6Ely OsorioAún no hay calificaciones
- Manual R1 2008 PDFDocumento108 páginasManual R1 2008 PDFFrancisco Javier Villahermosa ChavesAún no hay calificaciones
- JoanMorazaS4.T4.1 Boletin InformativoDocumento4 páginasJoanMorazaS4.T4.1 Boletin Informativolexy artilesAún no hay calificaciones
- Modelo de Negocio Sustentable PetStarDocumento8 páginasModelo de Negocio Sustentable PetStarJose Miguel Diaz GonzalezAún no hay calificaciones
- Vocabulary Related To TourismDocumento20 páginasVocabulary Related To Tourism4llyciaAún no hay calificaciones
- Instrucciones de Montajemanual Grua Hiab 009t2 PDFDocumento74 páginasInstrucciones de Montajemanual Grua Hiab 009t2 PDFwymjlb100% (1)
- Sismica MarinaDocumento29 páginasSismica Marinasalvador altez palominoAún no hay calificaciones
- Fase 2 - Modelacion Ambiental CONSOLIDADODocumento21 páginasFase 2 - Modelacion Ambiental CONSOLIDADOVivianaGaitanAún no hay calificaciones