También podría gustarte
- 5° Ficha Ept. Unidad 02 Actv 01Documento5 páginas5° Ficha Ept. Unidad 02 Actv 01Hipolito Crispin SalcedoAún no hay calificaciones
- Ideas de Negocio Sara MolinaDocumento20 páginasIdeas de Negocio Sara Molinasara molinaAún no hay calificaciones
- EmprendedorDocumento7 páginasEmprendedorEdith Hernandez BailonAún no hay calificaciones
- PREPARANDO EXPOSICIÓN DE MI PROYECTO - 4toDocumento3 páginasPREPARANDO EXPOSICIÓN DE MI PROYECTO - 4toFabio HinostrozaAún no hay calificaciones
- EPT 3y 4 Eval. - Diagnostica - ComputacionDocumento4 páginasEPT 3y 4 Eval. - Diagnostica - ComputacionNANCY FLORES ESPINOZAAún no hay calificaciones
- EmprendimientoDocumento30 páginasEmprendimientoMopi HerculesAún no hay calificaciones
- A. Entrevista de ExploraciónDocumento5 páginasA. Entrevista de ExploraciónLuis Jesus HphAún no hay calificaciones
- LAXANTEDocumento11 páginasLAXANTEShaoranX1000 XDAún no hay calificaciones
- Guía de Entrevista - Guía PrototipoDocumento6 páginasGuía de Entrevista - Guía PrototipoLuis Jesus HphAún no hay calificaciones
- 4° Areas ComplementariasDocumento20 páginas4° Areas ComplementariasJhoan Coronel ChasqueroAún no hay calificaciones
- Práctica 4. Solución Creativa de Problemas I - Grupo 2Documento6 páginasPráctica 4. Solución Creativa de Problemas I - Grupo 2José Rafael GuillénAún no hay calificaciones
- Ideas ActivadorasDocumento4 páginasIdeas ActivadorasYamlet ColoradoAún no hay calificaciones
- Trabajofinal2 PDFDocumento28 páginasTrabajofinal2 PDFbasiledfAún no hay calificaciones
- Guía Práctica #13Documento19 páginasGuía Práctica #13FELITA JAZMIN ANTON VALVERDEAún no hay calificaciones
- Tarea Viernes Idea Publicitaria GrupalDocumento5 páginasTarea Viernes Idea Publicitaria GrupalINES MARLENE CALLIZAYA VILLALBAAún no hay calificaciones
- EmpatizarDocumento3 páginasEmpatizarherix castro de la cruzAún no hay calificaciones
- Semana12 IdearDocumento11 páginasSemana12 Idearedmundo12344Aún no hay calificaciones
- 1° SEM. 13.8.21. CyTDocumento5 páginas1° SEM. 13.8.21. CyTSamuel Benigno Balcázar LozanoAún no hay calificaciones
- Sesion Marin Com 19-06-19Documento6 páginasSesion Marin Com 19-06-19Marisol Pariona VillaverdeAún no hay calificaciones
- Práctica 4. CreativadDocumento8 páginasPráctica 4. CreativadJoel TabareAún no hay calificaciones
- Validación o Creación de La Idea de Negocio.Documento19 páginasValidación o Creación de La Idea de Negocio.Kelly ForeroAún no hay calificaciones
- Proyecto Emprendedor FinalDocumento19 páginasProyecto Emprendedor FinalIsabel Linares PanduroAún no hay calificaciones
- Actividad 22 y 23Documento13 páginasActividad 22 y 23David PraviaAún no hay calificaciones
- Formato de Plan de NegociosDocumento25 páginasFormato de Plan de NegociosDAYANNE ABIGAIL SANTAMARIA MOLINAAún no hay calificaciones
- Calidad JaponesaDocumento4 páginasCalidad JaponesarkiyamaAún no hay calificaciones
- Ficha de Emprendimiento, Desing Thinking 2°Documento3 páginasFicha de Emprendimiento, Desing Thinking 2°Lea Miranda RemigioAún no hay calificaciones
- Condicionamiento en Un PerroDocumento19 páginasCondicionamiento en Un PerroDeliaGlezAún no hay calificaciones
- Hábitos: Hábitos Poderosos De Confianza Exitosa Cómo Desarrollar Hábitos Mentales Y HábitosDe EverandHábitos: Hábitos Poderosos De Confianza Exitosa Cómo Desarrollar Hábitos Mentales Y HábitosAún no hay calificaciones
- Proyectos Hechos en Design ThinkingDocumento6 páginasProyectos Hechos en Design ThinkingDamiana Cueva ManchegoAún no hay calificaciones
- EPTDocumento15 páginasEPTAna SofiaAún no hay calificaciones
- Ta1 IntegradorDocumento8 páginasTa1 IntegradorJean PiereAún no hay calificaciones
- ACTIVIDAD 01 3° y 4°-6ta ExpDocumento9 páginasACTIVIDAD 01 3° y 4°-6ta ExpRomel SanchezAún no hay calificaciones
- Emprendimiento DescripcionDocumento4 páginasEmprendimiento DescripcionPaulina CarriónAún no hay calificaciones
- EXPERIENCIA VI - ANEXO 1 - 1°y 2°Documento4 páginasEXPERIENCIA VI - ANEXO 1 - 1°y 2°Elvita ReyesAún no hay calificaciones
- Grupo 1 EPT 3ºBDocumento9 páginasGrupo 1 EPT 3ºBleandro lucanaAún no hay calificaciones
- EmbriológicoDocumento10 páginasEmbriológicoedwinsalgueromariaAún no hay calificaciones
- Actividad 8. Consolidación de La Idea de NegocioDocumento15 páginasActividad 8. Consolidación de La Idea de Negociomaria cristina arango fonnegraAún no hay calificaciones
- Los 5 secretos mejor guardados de las personas productivasDe EverandLos 5 secretos mejor guardados de las personas productivasCalificación: 1 de 5 estrellas1/5 (1)
- Informe de Proyecto PrimariaDocumento25 páginasInforme de Proyecto PrimariaELIZABETH DE LA CRUZ LIBERATOAún no hay calificaciones
- Portafolio Proyecto de Emprendimiento Hamburguesas Categoría A ServiciosDocumento6 páginasPortafolio Proyecto de Emprendimiento Hamburguesas Categoría A ServiciosDiego RivasAún no hay calificaciones
- Pensar para aprender: Cómo transformar el aprendizaje en el aula con el TBLDe EverandPensar para aprender: Cómo transformar el aprendizaje en el aula con el TBLAún no hay calificaciones
- Innovación y Diseños de Productos y ServiciosDocumento5 páginasInnovación y Diseños de Productos y ServiciosAlfonsoAún no hay calificaciones
- Respuestas Cuadernillo GIN Parte 1Documento10 páginasRespuestas Cuadernillo GIN Parte 1Ignacio WalterosAún no hay calificaciones
- CARPETA Documento de Ruth Liz Barra SarmientoDocumento27 páginasCARPETA Documento de Ruth Liz Barra SarmientoAdrianaFriasMarcaAún no hay calificaciones
- Fase 1 - Empatizar - Sesión 6 HorasDocumento8 páginasFase 1 - Empatizar - Sesión 6 HorasFiorella Sosa TapiaAún no hay calificaciones
- EF Etapa de InvestigaciónDocumento9 páginasEF Etapa de InvestigaciónAndres espinozaAún no hay calificaciones
- Eda 5-Semana 24.actividad 1-3 y 4to AñoDocumento17 páginasEda 5-Semana 24.actividad 1-3 y 4to AñoYuriko RosalesAún no hay calificaciones
- Experiencia 06 Aprendo en CasaDocumento5 páginasExperiencia 06 Aprendo en CasaMARIOAún no hay calificaciones
- ¿Cuál Es El Problema?: 1°, 2°, 3°, 4° y 5° Grado: EDUCACIÓN PARA EL TRABAJODocumento5 páginas¿Cuál Es El Problema?: 1°, 2°, 3°, 4° y 5° Grado: EDUCACIÓN PARA EL TRABAJOAngie Brigitte Alva EscobarAún no hay calificaciones
- Boletin Agosto 2020Documento27 páginasBoletin Agosto 2020Are MoralesAún no hay calificaciones
- Exp 6Documento5 páginasExp 6María MamaniAún no hay calificaciones
- Guía Práctica #13 (1) Corregir 1Documento18 páginasGuía Práctica #13 (1) Corregir 1eduardoferminvasquezvelasquezAún no hay calificaciones
- 1.2 Actividad 1 para Estudiantes - 3º-4ºgradoDocumento4 páginas1.2 Actividad 1 para Estudiantes - 3º-4ºgradolimhi sariahAún no hay calificaciones
- Actividad 1Documento5 páginasActividad 1Efrain Choque CarreonAún no hay calificaciones
- Semana 4 - Grado 10 - JMDocumento19 páginasSemana 4 - Grado 10 - JMKEHIDY JULIANA URREGO MORERAAún no hay calificaciones
- CARPETA DE RECUPERACION DE EPT 3ro.Documento27 páginasCARPETA DE RECUPERACION DE EPT 3ro.Sarita Yanina Yucra TaipeAún no hay calificaciones
- Informe Proyecto de Emprendimiento e InnovaciónDocumento12 páginasInforme Proyecto de Emprendimiento e InnovaciónJaviera JoplinAún no hay calificaciones
- Carpeta Recuperacion EPT 1º y 2º Mas InteresantesDocumento21 páginasCarpeta Recuperacion EPT 1º y 2º Mas Interesantesjazsuley2602Aún no hay calificaciones
- Problemas Con Los TipsDocumento17 páginasProblemas Con Los TipsJHONY YANCHAPAXIAún no hay calificaciones
- Rutina de Maki ZeninDocumento4 páginasRutina de Maki Zeninxohap8576088% (16)
- L1 - MaterialesDocumento7 páginasL1 - Materialesxohap85760Aún no hay calificaciones
- L4 - SombrasDocumento8 páginasL4 - Sombrasxohap85760Aún no hay calificaciones
- L3 - IluminaciónDocumento8 páginasL3 - Iluminaciónxohap85760Aún no hay calificaciones
- L1 - CámarasDocumento9 páginasL1 - Cámarasxohap85760Aún no hay calificaciones
- L2 - EncuadresDocumento6 páginasL2 - Encuadresxohap85760Aún no hay calificaciones
- Tarea Foro 1 - INF Edison NuñezDocumento2 páginasTarea Foro 1 - INF Edison NuñezFrancisco GarciaAún no hay calificaciones
- DACS4 EjerciciosDocumento5 páginasDACS4 EjerciciosJonathan Torija AguilarAún no hay calificaciones
- COMPROBANTESDocumento30 páginasCOMPROBANTESBarajas ChavezAún no hay calificaciones
- Manual de Usuario Ultrasonido Fujifilm Sonosite IvizDocumento205 páginasManual de Usuario Ultrasonido Fujifilm Sonosite IvizAlex CeballosAún no hay calificaciones
- Instalación de Un Servidor Xampp en Una Maquina Virtual LinuxDocumento9 páginasInstalación de Un Servidor Xampp en Una Maquina Virtual LinuxSoniaFernandezSapenaAún no hay calificaciones
- Capitulo 07 Plan de MedidasDocumento31 páginasCapitulo 07 Plan de MedidasLaura BertainaAún no hay calificaciones
- Protocolo República de CubaDocumento17 páginasProtocolo República de CubaIvan Velazquez AguileraAún no hay calificaciones
- Sistema de Informaacion para Compras y AbastecimientosDocumento61 páginasSistema de Informaacion para Compras y AbastecimientosGerardo Esparza100% (1)
- Diagrama de VibracionDocumento14 páginasDiagrama de Vibracionyoselin gilAún no hay calificaciones
- Modelo de Examen Del Segundo ParcialDocumento3 páginasModelo de Examen Del Segundo ParcialEstefania OrtizAún no hay calificaciones
- CARTILLA EDUCACION TECNOLOGICA 2do Año (1) FavaloroDocumento32 páginasCARTILLA EDUCACION TECNOLOGICA 2do Año (1) FavaloroCüervä AvtAún no hay calificaciones
- Tema 2. AlgoritmosDocumento16 páginasTema 2. AlgoritmosCarla AguirreAún no hay calificaciones
- 04 Arquitectura ISADocumento21 páginas04 Arquitectura ISADany MaldonadoAún no hay calificaciones
- Informe 01 William Torres00000000000000000000000000000Documento10 páginasInforme 01 William Torres00000000000000000000000000000Ni AnAún no hay calificaciones
- Resumen de La LeyDocumento16 páginasResumen de La LeyNoa Piñeiro LópezAún no hay calificaciones
- Guía+registro de Proveedores PCV3Documento10 páginasGuía+registro de Proveedores PCV3rubenAún no hay calificaciones
- Matriz To BeDocumento3 páginasMatriz To BeBryan Enrique Preciado MagallanesAún no hay calificaciones
- Cuaderno de InformesDocumento24 páginasCuaderno de InformesJuan DominguezAún no hay calificaciones
- Trabajo de InglesDocumento2 páginasTrabajo de InglesEdyllyanisAún no hay calificaciones
- Importancia de La MecatrónicaDocumento4 páginasImportancia de La MecatrónicaBaltazar234Aún no hay calificaciones
- Fallas y Soluciones Comentadas de Fuentes de PC AtxDocumento6 páginasFallas y Soluciones Comentadas de Fuentes de PC AtxJoseph Hernandez100% (1)
- Meso Ayerdi - Un Nuevo Tipo de Profesional Llama A Las Puertas Del PeriodismoDocumento16 páginasMeso Ayerdi - Un Nuevo Tipo de Profesional Llama A Las Puertas Del PeriodismoAlfredoHugoMarioCeciseAún no hay calificaciones
- Digitalización de Las PymesDocumento11 páginasDigitalización de Las PymesJavier Z.Aún no hay calificaciones
- Component Type-Approval Certificate in Respect of Non-Original Exhaust System For A Type of Motorcycle According To Directive 97/24/ec - Chap IxDocumento1 páginaComponent Type-Approval Certificate in Respect of Non-Original Exhaust System For A Type of Motorcycle According To Directive 97/24/ec - Chap IxJoan AymerichAún no hay calificaciones
- 1908EM-CON-PTC-121 Rev.01 PROCEDIMIENTO PARA LA INSTALACIÓN DE TUBERÍA CORRUGADA HDSDocumento5 páginas1908EM-CON-PTC-121 Rev.01 PROCEDIMIENTO PARA LA INSTALACIÓN DE TUBERÍA CORRUGADA HDSjesus gutierrezAún no hay calificaciones
- Taller UnoDocumento15 páginasTaller Unojohn hernandezAún no hay calificaciones
- Competencia de XiaomiDocumento2 páginasCompetencia de XiaomiPaola Joselin Jimenez VargasAún no hay calificaciones
- OTC2 Centrifuga Separadora para El Tratamiento de Liquidos A Base de Aceite ESDocumento4 páginasOTC2 Centrifuga Separadora para El Tratamiento de Liquidos A Base de Aceite ESCarlosAún no hay calificaciones
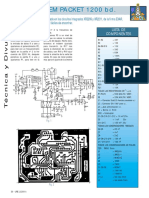
- Modem Packet 1200 BaudiosDocumento2 páginasModem Packet 1200 BaudiosExperiment BarthAún no hay calificaciones
- TCP IpDocumento12 páginasTCP IpveracespedesAún no hay calificaciones