También podría gustarte
- Tensor trifocal: Explorando la profundidad, el movimiento y la estructura en visión por computadoraDe EverandTensor trifocal: Explorando la profundidad, el movimiento y la estructura en visión por computadoraAún no hay calificaciones
- Flujos de Señal en Sistemas de Control ModernoDocumento9 páginasFlujos de Señal en Sistemas de Control ModernoEduardo Lopez AntonioAún no hay calificaciones
- Transformación lineal directa: Aplicaciones prácticas y técnicas en visión por computadora.De EverandTransformación lineal directa: Aplicaciones prácticas y técnicas en visión por computadora.Aún no hay calificaciones
- Sistemas de Control TallerDocumento16 páginasSistemas de Control TallerCarlos SideregtsAún no hay calificaciones
- Introducción a la geometría analíticaDe EverandIntroducción a la geometría analíticaCalificación: 4 de 5 estrellas4/5 (1)
- LAB3 Jaderd Urbina 20152006798Documento21 páginasLAB3 Jaderd Urbina 20152006798carlos andres montesAún no hay calificaciones
- U2 Diagrama de Bloques de ControlDocumento21 páginasU2 Diagrama de Bloques de ControlDavid Ferrusca MartinezAún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Modelo Matematico en Control de ProcesosDocumento8 páginasModelo Matematico en Control de ProcesosSebas SebasAún no hay calificaciones
- Estabilidad Practica 3Documento11 páginasEstabilidad Practica 3Sussell Ruiz RamirezAún no hay calificaciones
- Diagrama de BloquesDocumento29 páginasDiagrama de BloquesRoxana Martínez RodríguezAún no hay calificaciones
- Diagrama de BloquesDocumento29 páginasDiagrama de Bloquescaceresccp100% (3)
- Algoritmo de la línea de Bresenham: Representación eficiente de líneas con píxeles perfectos para visión por computadoraDe EverandAlgoritmo de la línea de Bresenham: Representación eficiente de líneas con píxeles perfectos para visión por computadoraAún no hay calificaciones
- Diagrama de Bloques Graicelys VolcanDocumento10 páginasDiagrama de Bloques Graicelys VolcangraicelysAún no hay calificaciones
- Informe de Laboratorio de Control Numero 1Documento11 páginasInforme de Laboratorio de Control Numero 1brayan jaimesAún no hay calificaciones
- Diagrama de Bloques Con ReferenciasDocumento24 páginasDiagrama de Bloques Con ReferenciasLeidy BernalAún no hay calificaciones
- Diagramas de Bloques y de Flujo de SeñalDocumento21 páginasDiagramas de Bloques y de Flujo de SeñalStinkfist VargasAún no hay calificaciones
- Constitución de Los Elementos Del Proceso TotalDocumento5 páginasConstitución de Los Elementos Del Proceso Totalian XDAún no hay calificaciones
- Modelo MatematicosDocumento10 páginasModelo MatematicosJairo Alonso Ojeda AriasAún no hay calificaciones
- Diagramas de Bloques en Sistemas de Control de ProcesosDocumento4 páginasDiagramas de Bloques en Sistemas de Control de Procesosdicapmca90% (10)
- DIAGRAMAS BloquesDocumento4 páginasDIAGRAMAS BloquesdavideduardoarteagafAún no hay calificaciones
- Funcion de Transferencia Mason PresentacionDocumento35 páginasFuncion de Transferencia Mason PresentacionDaniel CastañedaAún no hay calificaciones
- S03.s1 - Control - Clásico - Modelo MatemáticoDocumento57 páginasS03.s1 - Control - Clásico - Modelo MatemáticoJONATHANAún no hay calificaciones
- Función de TransferenciaDocumento10 páginasFunción de TransferenciaMaldito SudacaAún no hay calificaciones
- Funcion de TransferenciaDocumento7 páginasFuncion de Transferenciaedrilp21Aún no hay calificaciones
- Modelación Matemática - Sistemas DinámicosDocumento23 páginasModelación Matemática - Sistemas DinámicosLuis VillegasAún no hay calificaciones
- Diagrama de BloquesDocumento14 páginasDiagrama de BloquesHector AriasAún no hay calificaciones
- Diagrama de BloquesDocumento14 páginasDiagrama de Bloquesdark zero100% (1)
- UNIDAD II Funcion de TransferenciaDocumento54 páginasUNIDAD II Funcion de TransferenciaDavid Jose GodoyAún no hay calificaciones
- Material de LecturaDocumento15 páginasMaterial de LecturajuanAún no hay calificaciones
- Diagrama de Bloques FinalDocumento19 páginasDiagrama de Bloques FinalLIDER YOEL CASTILLO LABAN100% (1)
- Lazos de ControlDocumento4 páginasLazos de ControldabodraAún no hay calificaciones
- 6X 19310412 Inv4Documento30 páginas6X 19310412 Inv4OSCAR RUBIO LEONAún no hay calificaciones
- Diagramas de BloquesDocumento9 páginasDiagramas de BloquesmiluelAún no hay calificaciones
- Actividad 2 AutomatizacionDocumento15 páginasActividad 2 AutomatizacionJonathan OmarAún no hay calificaciones
- Cap 7 y 8 Diagramas de BloquesDocumento12 páginasCap 7 y 8 Diagramas de BloquesFiorella Cinthia Benites LopezAún no hay calificaciones
- Guia N 2 Funcion de Transferencia y Diagramas de BloquesDocumento10 páginasGuia N 2 Funcion de Transferencia y Diagramas de Bloquesicepolo100% (1)
- Portafolio Oscar MedinaDocumento24 páginasPortafolio Oscar MedinaPablo RamirezAún no hay calificaciones
- Diagrama D e BloquesDocumento20 páginasDiagrama D e BloquesAldony Pari ChaupisAún no hay calificaciones
- Modelado Matemático de Sistemas DinámicosDocumento19 páginasModelado Matemático de Sistemas Dinámicospiwy017Aún no hay calificaciones
- Diagrama de BloquesDocumento13 páginasDiagrama de Bloquesjesus antepazAún no hay calificaciones
- Diagrama de BloquesDocumento123 páginasDiagrama de BloquesdiegocuyaAún no hay calificaciones
- Sistemas DinámicosDocumento15 páginasSistemas DinámicosDiego Guadalupe Diaz SantiagoAún no hay calificaciones
- Unidad 2 - Modelado MatemáticoDocumento30 páginasUnidad 2 - Modelado Matemáticoangel9021Aún no hay calificaciones
- 3.1 y 3.2 InstrumentacionDocumento22 páginas3.1 y 3.2 InstrumentacionDaniela Lopez DelgadoAún no hay calificaciones
- Diagramas LECTURA DE PLANODocumento8 páginasDiagramas LECTURA DE PLANORoger FigueraAún no hay calificaciones
- Clase 7 DatcDocumento33 páginasClase 7 DatcVanessa ZapataAún no hay calificaciones
- Álgebra de Bloques DiapositivasDocumento49 páginasÁlgebra de Bloques DiapositivasOmar Zavala BravoAún no hay calificaciones
- Unidad 2 Control DIgitalDocumento18 páginasUnidad 2 Control DIgitalOpherothAún no hay calificaciones
- Sistemas de ControlDocumento14 páginasSistemas de ControlAlexander PaucarAún no hay calificaciones
- Práctica de Sistemas de ControlDocumento6 páginasPráctica de Sistemas de ControlAlejandro Quinteros CabreraAún no hay calificaciones
- Resumen Unidad 3Documento15 páginasResumen Unidad 3Citlali Guadalupe Miranda LópezAún no hay calificaciones
- Matlab ControlDocumento9 páginasMatlab Controljuan carlos revillaAún no hay calificaciones
- Sistemas Dinamicos Simplificacion Diagramas de BloquesDocumento13 páginasSistemas Dinamicos Simplificacion Diagramas de Bloquesegarcia_409752Aún no hay calificaciones
- Laboratorio N°1 - Trabajo GrupalDocumento22 páginasLaboratorio N°1 - Trabajo GrupalOSCAR VINICIO CHUQUITARCO LAGLAAún no hay calificaciones
- Actividad 1.2 Funcion de TransferenciaDocumento11 páginasActividad 1.2 Funcion de TransferenciaLuis Alberto RoblesAún no hay calificaciones
- Fargo DonpapaspeladasDocumento2 páginasFargo DonpapaspeladasMaikel RaadAún no hay calificaciones
- DiagramaDocumento4 páginasDiagramaMaikel RaadAún no hay calificaciones
- 2do Informe Tema 3 - Grupo 2Documento23 páginas2do Informe Tema 3 - Grupo 2Maikel RaadAún no hay calificaciones
- Capítulo 1 (El Problema)Documento4 páginasCapítulo 1 (El Problema)Maikel RaadAún no hay calificaciones
- Mickeal Raad - Tarea 1 Sistema OperativoDocumento13 páginasMickeal Raad - Tarea 1 Sistema OperativoMaikel RaadAún no hay calificaciones
- Tarea3 Mickeal Raad Sistema DinamicosDocumento22 páginasTarea3 Mickeal Raad Sistema DinamicosMaikel RaadAún no hay calificaciones
- Mickeal Raad - Tarea 1 Base de DatosDocumento15 páginasMickeal Raad - Tarea 1 Base de DatosMaikel RaadAún no hay calificaciones
- Capital de TrabajoDocumento4 páginasCapital de TrabajoMaikel RaadAún no hay calificaciones
- Mickeal Raad - Archivos Entrada y SalidaDocumento14 páginasMickeal Raad - Archivos Entrada y SalidaMaikel RaadAún no hay calificaciones
- Mickeal Raad - Informe 2 Modelo RelacionalDocumento9 páginasMickeal Raad - Informe 2 Modelo RelacionalMaikel RaadAún no hay calificaciones
- Memoria Virtual - Mickeal RaadDocumento5 páginasMemoria Virtual - Mickeal RaadMaikel RaadAún no hay calificaciones
- Ivancevich J Lorenzi P Skinner S 1996 Gestion Calidad y CompetitividadDocumento46 páginasIvancevich J Lorenzi P Skinner S 1996 Gestion Calidad y CompetitividadMaikel RaadAún no hay calificaciones
- Memoria - Mickeal RaadDocumento5 páginasMemoria - Mickeal RaadMaikel RaadAún no hay calificaciones
- 1 Posicion Onto Epistemologica Del Enfoque de SistemasDocumento19 páginas1 Posicion Onto Epistemologica Del Enfoque de SistemasMaikel RaadAún no hay calificaciones
- Mercantilizacion 1Documento13 páginasMercantilizacion 1Yaneth VasquezAún no hay calificaciones
- Indicador de Peso Modelo B3 LCD B3 LEDDocumento9 páginasIndicador de Peso Modelo B3 LCD B3 LEDLuis HuertaAún no hay calificaciones
- Linner G PDFDocumento2 páginasLinner G PDFAldair PėrezAún no hay calificaciones
- Angulosdeelevacinydepresin 111130223800 Phpapp02Documento7 páginasAngulosdeelevacinydepresin 111130223800 Phpapp02San Juan Bautista De La Salle OccopampaAún no hay calificaciones
- T 2. Enunciado - Test - CarterasDocumento2 páginasT 2. Enunciado - Test - CarterasRaulAún no hay calificaciones
- Curso Operacion Mantenimiento Cargadores Frontales 938g 950g Caterpillar PDFDocumento58 páginasCurso Operacion Mantenimiento Cargadores Frontales 938g 950g Caterpillar PDFdenny_pa_bu100% (4)
- Nociones Basicas de GramaticaDocumento16 páginasNociones Basicas de Gramaticadania muñozAún no hay calificaciones
- Tomo IV - Plan de GestiónDocumento209 páginasTomo IV - Plan de GestiónJuan Carlos Jimenez NinaAún no hay calificaciones
- Productos y SubproductosDocumento9 páginasProductos y SubproductosMiguel A SolísAún no hay calificaciones
- Procedimiento de Mtto Equipo Compacto - ConversionDocumento21 páginasProcedimiento de Mtto Equipo Compacto - ConversionAlonsoAún no hay calificaciones
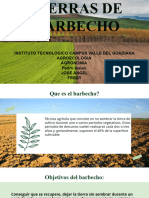
- Tierras de BarbechoDocumento10 páginasTierras de BarbechoesandovalgarzaAún no hay calificaciones
- Problema20mottDocumento26 páginasProblema20mottAlezzio MenendezAún no hay calificaciones
- 1-Diploma Internacional en Alta Gerencia de Produccion, Mantenimiento y Auditor Interno de Calidad ISO 9001Documento10 páginas1-Diploma Internacional en Alta Gerencia de Produccion, Mantenimiento y Auditor Interno de Calidad ISO 9001Carlos HuamanAún no hay calificaciones
- Metodo Exegetico Sincronico de La BibliaDocumento27 páginasMetodo Exegetico Sincronico de La Bibliarafael alexis pájaro rojas100% (1)
- Fuentes Del Derecho ProcesalDocumento3 páginasFuentes Del Derecho ProcesalAlice Araya BatresAún no hay calificaciones
- Programa Del Curso de Especialista en Constelaciones FamiliaresDocumento8 páginasPrograma Del Curso de Especialista en Constelaciones FamiliaresAníbal Pérez Peñaranda100% (1)
- Clima LaboralDocumento9 páginasClima LaboralPEDROAún no hay calificaciones
- Funciones Esenciales de La FamiliaDocumento3 páginasFunciones Esenciales de La FamiliaCarmen TipianAún no hay calificaciones
- Estudio de CasoDocumento10 páginasEstudio de CasoJhon Edwar VelascoAún no hay calificaciones
- Momenclatura Comun Del Mercosur - BrasilDocumento5 páginasMomenclatura Comun Del Mercosur - BrasilMariannnnnAún no hay calificaciones
- Informe de PrecalificacionDocumento10 páginasInforme de PrecalificacioncesarAún no hay calificaciones
- Ensayo Medio Ambiente MercadocteniaDocumento3 páginasEnsayo Medio Ambiente MercadocteniaYavhet VazquezAún no hay calificaciones
- Human Capital Outsourcing SasDocumento49 páginasHuman Capital Outsourcing SasAXA COLPATRIA SEGUROSAún no hay calificaciones
- Edificios IndustrialesDocumento2 páginasEdificios IndustrialesMario GómezAún no hay calificaciones
- La Tactica en Las Batallas de La Historia Tomo IDocumento242 páginasLa Tactica en Las Batallas de La Historia Tomo IRodrigo Cruz0% (2)
- INFORME-Historia de HondurasDocumento16 páginasINFORME-Historia de HonduraslindalyAún no hay calificaciones
- Examen - Trabajo Práctico 1 (TP1) 80%Documento13 páginasExamen - Trabajo Práctico 1 (TP1) 80%LauraMzaUvqAún no hay calificaciones
- La Teoría General de Keynes y La Macroeconomía ModernaDocumento14 páginasLa Teoría General de Keynes y La Macroeconomía Modernazoram arroyoAún no hay calificaciones
- Sofware CadDocumento50 páginasSofware CadEvelyn E-vAún no hay calificaciones
- Economía - Sesión 8.costosDocumento28 páginasEconomía - Sesión 8.costosGonzalez Delgado MelkyAún no hay calificaciones
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDe EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroCalificación: 4 de 5 estrellas4/5 (1)
- Las matemáticas de la biología: De las celdas de las abejas a las simetrías de los virusDe EverandLas matemáticas de la biología: De las celdas de las abejas a las simetrías de los virusCalificación: 4 de 5 estrellas4/5 (1)
- Fundamentos de matemática: Introducción al nivel universitarioDe EverandFundamentos de matemática: Introducción al nivel universitarioCalificación: 3 de 5 estrellas3/5 (9)
- Aprendizaje Automático: El Aprendizaje Automático para principiantes que desean comprender aplicaciones, Inteligencia Artificial, Minería de Datos, Big Data y másDe EverandAprendizaje Automático: El Aprendizaje Automático para principiantes que desean comprender aplicaciones, Inteligencia Artificial, Minería de Datos, Big Data y másCalificación: 3.5 de 5 estrellas3.5/5 (6)
- Visualización: Cambie su vida en cuatro semanas utilizando la ley de atracciónDe EverandVisualización: Cambie su vida en cuatro semanas utilizando la ley de atracciónCalificación: 5 de 5 estrellas5/5 (18)
- Criptografía sin secretos con Python: Spyware/Programa espíaDe EverandCriptografía sin secretos con Python: Spyware/Programa espíaCalificación: 5 de 5 estrellas5/5 (4)
- Mi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaDe EverandMi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaCalificación: 5 de 5 estrellas5/5 (5)
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- La Física - Aventura del pensamientoDe EverandLa Física - Aventura del pensamientoCalificación: 4.5 de 5 estrellas4.5/5 (9)
- Guía práctica para la refracción ocularDe EverandGuía práctica para la refracción ocularCalificación: 5 de 5 estrellas5/5 (2)
- Matemáticas financieras y evaluación de proyectos: Segunda ediciónDe EverandMatemáticas financieras y evaluación de proyectos: Segunda ediciónAún no hay calificaciones
- Cálculo integral: Técnicas de integraciónDe EverandCálculo integral: Técnicas de integraciónCalificación: 4 de 5 estrellas4/5 (8)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalDe EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalCalificación: 5 de 5 estrellas5/5 (3)
- Entrelazamiento cuántico y sincronicidad. Campos de fuerza, no localidad, percepciones extrasensoriales. Las sorprendentes propiedades de la física cuántica.De EverandEntrelazamiento cuántico y sincronicidad. Campos de fuerza, no localidad, percepciones extrasensoriales. Las sorprendentes propiedades de la física cuántica.Calificación: 4.5 de 5 estrellas4.5/5 (9)
- La magia de los números: 136 recreaciones aritméticas y geométricasDe EverandLa magia de los números: 136 recreaciones aritméticas y geométricasCalificación: 1 de 5 estrellas1/5 (1)
- El principio de posibilidad: Cómo la física cuántica puede mejorar tu forma de pensar, vivir y amarDe EverandEl principio de posibilidad: Cómo la física cuántica puede mejorar tu forma de pensar, vivir y amarCalificación: 4 de 5 estrellas4/5 (6)
- Mentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraDe EverandMentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraCalificación: 4.5 de 5 estrellas4.5/5 (5)
- Matemáticas financierasDe EverandMatemáticas financierasCalificación: 4 de 5 estrellas4/5 (7)
- Electricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiDe EverandElectricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiCalificación: 3.5 de 5 estrellas3.5/5 (5)
- Estadística básica: Introducción a la estadística con RDe EverandEstadística básica: Introducción a la estadística con RCalificación: 5 de 5 estrellas5/5 (8)
- UF1471 - Bases de datos relacionales y modelado de datosDe EverandUF1471 - Bases de datos relacionales y modelado de datosAún no hay calificaciones