También podría gustarte
- Tipos de buques y sistemas de comunicaciónDocumento31 páginasTipos de buques y sistemas de comunicaciónBeto CortezAún no hay calificaciones
- TEMARIODocumento21 páginasTEMARIORicardo David Sosa HernandezAún no hay calificaciones
- Preguntas Ayudas A La Navegacion (2ºevaluación)Documento4 páginasPreguntas Ayudas A La Navegacion (2ºevaluación)Carmen RiveroAún no hay calificaciones
- Investigacion AISDocumento4 páginasInvestigacion AISMARCO ANTONIO MARTINEZ CRUZ100% (1)
- VDR Ssas LritDocumento6 páginasVDR Ssas LritjosejackAún no hay calificaciones
- Equipos Electronicos de La NavegacionDocumento3 páginasEquipos Electronicos de La NavegacionLeiny VillamizarAún no hay calificaciones
- Automatic Identification SystemDocumento6 páginasAutomatic Identification SystemmilesAún no hay calificaciones
- Seguridad Maritima Paso 1,2 ParcialDocumento8 páginasSeguridad Maritima Paso 1,2 ParcialDIEGO EMILIO SALAZAR AQUIJEAún no hay calificaciones
- NavegaciónDocumento4 páginasNavegaciónkennybello0% (1)
- OMI resuelve directrices para el uso del SIA a bordoDocumento17 páginasOMI resuelve directrices para el uso del SIA a bordoVíctor BarujaAún no hay calificaciones
- 1 - Nomenclatura Marinera Unidad 3Documento28 páginas1 - Nomenclatura Marinera Unidad 3Matias PierAún no hay calificaciones
- Simulador de Puente I - Unidad 1 2do Año CubiertaDocumento24 páginasSimulador de Puente I - Unidad 1 2do Año CubiertamilesAún no hay calificaciones
- Curso Conductor Náutico 7mDocumento70 páginasCurso Conductor Náutico 7mAdrian SanjoseAún no hay calificaciones
- Reginave 2019Documento447 páginasReginave 2019German CoradiniAún no hay calificaciones
- Activida 1 - Analisis de Caso Accidente Crucero Costa Concornia Randy Gutierrez y Alvaro BerrioDocumento8 páginasActivida 1 - Analisis de Caso Accidente Crucero Costa Concornia Randy Gutierrez y Alvaro BerriomarlenyAún no hay calificaciones
- Manual Conductor NauticoDocumento70 páginasManual Conductor NauticoAntonela Garilli69% (16)
- Cartilla Radio OperadorDocumento20 páginasCartilla Radio OperadorLeonardo Mauricio Chaparro BarrigaAún no hay calificaciones
- Reconocimiento General de Los Equipos de Navegacion ElectronicaDocumento12 páginasReconocimiento General de Los Equipos de Navegacion ElectronicaJosé Josue Pereira PintoAún no hay calificaciones
- Publicaciones NauticasDocumento7 páginasPublicaciones Nauticasjames281193100% (1)
- Capítulo 8 (Navegación de Pilotaje)Documento47 páginasCapítulo 8 (Navegación de Pilotaje)Samuel VelázquezAún no hay calificaciones
- Sistema de Identificación Automatica (Ais)Documento18 páginasSistema de Identificación Automatica (Ais)juand2100% (1)
- Capitulo ViDocumento17 páginasCapitulo ViorianaAún no hay calificaciones
- Atraque de BuqueDocumento20 páginasAtraque de BuqueKarina PinedaAún no hay calificaciones
- Servicio de Aprendizaje Sena BRM 1Documento4 páginasServicio de Aprendizaje Sena BRM 1claudio meloAún no hay calificaciones
- Sistema Identificación AutomáticaDocumento4 páginasSistema Identificación AutomáticajosejackAún no hay calificaciones
- GMDSS IntroducciónDocumento29 páginasGMDSS IntroducciónsaddayAún no hay calificaciones
- Marcas de Seguridad para La Flotabilidad Del Buque en Agua Marinas y Dulces (Aguas Continentales)Documento19 páginasMarcas de Seguridad para La Flotabilidad Del Buque en Agua Marinas y Dulces (Aguas Continentales)Patricia Tizon YoveraAún no hay calificaciones
- SISTEMA AIS: IDENTIFICACIÓN AUTOMÁTICADocumento7 páginasSISTEMA AIS: IDENTIFICACIÓN AUTOMÁTICAEliecer MorenoAún no hay calificaciones
- Resumen Examen ProfesionalDocumento98 páginasResumen Examen ProfesionalOscar VelardeAún no hay calificaciones
- Exposición Del GPSDocumento9 páginasExposición Del GPSDaniuska LaraAún no hay calificaciones
- ECDIS SistemaDocumento17 páginasECDIS SistemaFrancisco Belda GarciaAún no hay calificaciones
- Sistema Mundial Socorro Seguridad Marítima GMDSSDocumento4 páginasSistema Mundial Socorro Seguridad Marítima GMDSSRolando ArciaAún no hay calificaciones
- Arqueo y FrancobordoDocumento12 páginasArqueo y FrancobordoAnonymous GyWzu5pHAún no hay calificaciones
- 2003.04.xx Belt - OMI Seguridad en PuertosDocumento5 páginas2003.04.xx Belt - OMI Seguridad en Puertosfelix belinchonAún no hay calificaciones
- Implementacion de Ais, VTS, VtmsDocumento5 páginasImplementacion de Ais, VTS, VtmsJosé Francisco Morales PizcoAún no hay calificaciones
- Cap 17 Navegacion CosteraDocumento62 páginasCap 17 Navegacion CosteraMarceliano Segura Zamudio100% (2)
- Solucionario Examen Parcial Teoría y PracticaDocumento4 páginasSolucionario Examen Parcial Teoría y PracticaAlex Ostos AlvaAún no hay calificaciones
- 224 Sisayn1Documento51 páginas224 Sisayn1Marcos J. Lopez L.100% (1)
- Resumen de Términos Navales 07.02.22 v1Documento10 páginasResumen de Términos Navales 07.02.22 v1rublasterAún no hay calificaciones
- Instrumentos de Un Puente de MandoDocumento46 páginasInstrumentos de Un Puente de MandoCristian Navarrete Fernandez88% (32)
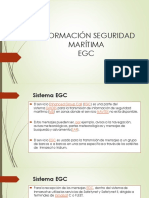
- Información Seguridad Marítima (Egc)Documento51 páginasInformación Seguridad Marítima (Egc)mercury7k29750Aún no hay calificaciones
- GM Muñoz Valdes Fabian SneyerDocumento2 páginasGM Muñoz Valdes Fabian Sneyerfabian sneyer muñoz valdesAún no hay calificaciones
- Inmarsat, Cospassarsat, Navtex, Egc, Sart, GMDSSSDocumento10 páginasInmarsat, Cospassarsat, Navtex, Egc, Sart, GMDSSSDavid PadillaAún no hay calificaciones
- (Capítulo 25) El Proceso de NavegaciónDocumento12 páginas(Capítulo 25) El Proceso de NavegaciónSamuel VelázquezAún no hay calificaciones
- Para EstudiarDocumento21 páginasPara EstudiarestebansolorzanoAún no hay calificaciones
- Puente de Mando 1Documento21 páginasPuente de Mando 1seapgunsAún no hay calificaciones
- Publicaciones NauticasDocumento18 páginasPublicaciones NauticasCarlos CerónAún no hay calificaciones
- Estabilidad VelerosDocumento6 páginasEstabilidad Velerostrolley64Aún no hay calificaciones
- Radar marino: funcionamiento, componentes y aplicacionesDocumento7 páginasRadar marino: funcionamiento, componentes y aplicacionesDorkis LinaresAún no hay calificaciones
- Orientacion Marinera TallerDocumento35 páginasOrientacion Marinera TallerLuIs CaRlos PeñaTa MartInezAún no hay calificaciones
- Draft SurveyDocumento81 páginasDraft Surveyjlb1212Aún no hay calificaciones
- Capitulo 4 SOLAS RadiocomunicacionesDocumento29 páginasCapitulo 4 SOLAS RadiocomunicacionesTiito Araya100% (1)
- 5.1. Descripcion de EquiposDocumento7 páginas5.1. Descripcion de Equiposluis romeroAún no hay calificaciones
- Seg. Per y Resp - Soc Omi Act 2022Documento206 páginasSeg. Per y Resp - Soc Omi Act 2022The StevenAún no hay calificaciones
- Ayudas A La NavegaciónDocumento57 páginasAyudas A La NavegaciónCarmen RiveroAún no hay calificaciones
- Patrón de embarcaciones de recreo PER: Curso de PERDe EverandPatrón de embarcaciones de recreo PER: Curso de PERCalificación: 4 de 5 estrellas4/5 (5)
- Operaciones auxiliares de mantenimiento externo de la aeronave. TMVO0109De EverandOperaciones auxiliares de mantenimiento externo de la aeronave. TMVO0109Aún no hay calificaciones
- Informe FísicaDocumento10 páginasInforme FísicaJaime SalasAún no hay calificaciones
- Examen 1parcialcalculoDocumento2 páginasExamen 1parcialcalculoJaime SalasAún no hay calificaciones
- Hoja de CalculoDocumento6 páginasHoja de CalculoJaime SalasAún no hay calificaciones
- Informe Hoja de CálculoDocumento5 páginasInforme Hoja de CálculoJaime SalasAún no hay calificaciones
- Informe Base de datos LibreOfficeDocumento5 páginasInforme Base de datos LibreOfficeJaime SalasAún no hay calificaciones
- Informe Hoja de CálculoDocumento5 páginasInforme Hoja de CálculoJaime SalasAún no hay calificaciones
- Informe Hoja de CálculoDocumento5 páginasInforme Hoja de CálculoJaime SalasAún no hay calificaciones
- Formación marítima: Disco Plimsoll y equipos de navegaciónDocumento34 páginasFormación marítima: Disco Plimsoll y equipos de navegaciónJaime SalasAún no hay calificaciones
- Informe Hoja de Cálculo - OdtDocumento5 páginasInforme Hoja de Cálculo - OdtJaime SalasAún no hay calificaciones
- Informe FísicaDocumento10 páginasInforme FísicaJaime SalasAún no hay calificaciones
- Procesador de Textos - OdtDocumento11 páginasProcesador de Textos - OdtJaime SalasAún no hay calificaciones
- Procesador de TextosDocumento10 páginasProcesador de TextosJaime SalasAún no hay calificaciones
- Hoja de CalculoDocumento6 páginasHoja de CalculoJaime SalasAún no hay calificaciones
- Informe Hoja de CálculoDocumento5 páginasInforme Hoja de CálculoJaime SalasAún no hay calificaciones
- Informe Hoja de CálculoDocumento5 páginasInforme Hoja de CálculoJaime SalasAún no hay calificaciones
- Informe Base de datos LibreOfficeDocumento5 páginasInforme Base de datos LibreOfficeJaime SalasAún no hay calificaciones
- Informe Base de datos LibreOfficeDocumento5 páginasInforme Base de datos LibreOfficeJaime SalasAún no hay calificaciones
- Obra de TeatroDocumento5 páginasObra de Teatroapi-458921074Aún no hay calificaciones
- Idr Dobles Colonia 2022Documento6 páginasIdr Dobles Colonia 2022Luciano MoltedoAún no hay calificaciones
- Reporte Experimento de Inclinacion ARC Independiente PDFDocumento6 páginasReporte Experimento de Inclinacion ARC Independiente PDFandresp1000Aún no hay calificaciones
- Una Voz en La NocheDocumento15 páginasUna Voz en La NocheAlfredo López HernándezAún no hay calificaciones
- Armada Española - Manual de Nudos PDFDocumento112 páginasArmada Española - Manual de Nudos PDFJuan FrancoAún no hay calificaciones
- Incoterms Cuadro SinopticoDocumento4 páginasIncoterms Cuadro SinopticoKike CG100% (1)
- GUIA 10 3.1 Resultado 46 Y 47 CONOCIMIENTO, DESEMPEÑO Y PRODUCTO RUBEN GALARZA.Documento9 páginasGUIA 10 3.1 Resultado 46 Y 47 CONOCIMIENTO, DESEMPEÑO Y PRODUCTO RUBEN GALARZA.Dario Galarza HEAún no hay calificaciones
- Faro Caleta PotterDocumento3 páginasFaro Caleta Potterkevyn porrasAún no hay calificaciones
- 5 Años - Actividad Del 06 de SetiembreDocumento53 páginas5 Años - Actividad Del 06 de SetiembreJohanitaBernalChampiAún no hay calificaciones
- Procedimiento Prueba Bollard PullDocumento5 páginasProcedimiento Prueba Bollard PullManuela CalleAún no hay calificaciones
- Cuestionario Ig - 2Documento8 páginasCuestionario Ig - 2Jackeline Prime50% (4)
- A-4 Skyhawk - 21Documento48 páginasA-4 Skyhawk - 21Andres AcostaAún no hay calificaciones
- Uss IllinoisDocumento5 páginasUss Illinoisramiro torresAún no hay calificaciones
- Planos de Barcos GratisDocumento2 páginasPlanos de Barcos GratisRoger Ramos50% (2)
- Repaso Papelucho HistoriadorDocumento30 páginasRepaso Papelucho HistoriadorNicoleReyesSegoviaAún no hay calificaciones
- Especificacion Técnicapara Construcciónde Piratasen MaderaDocumento7 páginasEspecificacion Técnicapara Construcciónde Piratasen MaderamrcelocabreraAún no hay calificaciones
- La Evolución Del Transporte Internacional de MercancíasDocumento2 páginasLa Evolución Del Transporte Internacional de Mercancíascarlos rojasAún no hay calificaciones
- A Partir Del Documental Sobre El Libro Atrapados en El HieloDocumento2 páginasA Partir Del Documental Sobre El Libro Atrapados en El HieloMichael TorresAún no hay calificaciones
- Caratula y Programa Manualconductor Nautico - PnaDocumento5 páginasCaratula y Programa Manualconductor Nautico - PnaGerardoAún no hay calificaciones
- Libro Presentacion de ProyectoDocumento29 páginasLibro Presentacion de ProyectoCristobal Saez RiquelmeAún no hay calificaciones
- Tareas matemáticas 10° período 2017Documento2 páginasTareas matemáticas 10° período 2017attAún no hay calificaciones
- Pre-Si-001 Pre General Rev.0088Documento88 páginasPre-Si-001 Pre General Rev.0088angelica vazquezAún no hay calificaciones
- El Contrato de FletamentoDocumento5 páginasEl Contrato de FletamentoDiego GiussepyAún no hay calificaciones
- Revista Mascaron de Proa Digital 24Documento92 páginasRevista Mascaron de Proa Digital 24Andrés Paiva100% (1)
- GENERACION DE RESIDUOS PROVENIENTES DE BUQUES Y FACILIDADES PORTUARIASDocumento25 páginasGENERACION DE RESIDUOS PROVENIENTES DE BUQUES Y FACILIDADES PORTUARIASjgikasnn xdbAún no hay calificaciones
- Diccionario Infraestructura PortuariaDocumento8 páginasDiccionario Infraestructura PortuariaCarlos Ospina JimenezAún no hay calificaciones
- COLREGDocumento41 páginasCOLREGRamses RodriguezAún no hay calificaciones
- Mar Del PlataDocumento17 páginasMar Del PlataJuan Manuel BiesaAún no hay calificaciones
- Check List SSPADocumento1 páginaCheck List SSPAHenry MojarrazAún no hay calificaciones
- Revalorando La Acción Heróica de Miguel Grau - Semana 27Documento6 páginasRevalorando La Acción Heróica de Miguel Grau - Semana 27veronica cahua vallesAún no hay calificaciones