También podría gustarte
- Problemas resueltos de Hidráulica de CanalesDe EverandProblemas resueltos de Hidráulica de CanalesCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Ejercicios prácticos con Electrónica: Proyectos de electrónica con Arduino y Raspberry PiDe EverandEjercicios prácticos con Electrónica: Proyectos de electrónica con Arduino y Raspberry PiCalificación: 5 de 5 estrellas5/5 (1)
- Informe 6 Laboratorio de Control 2Documento20 páginasInforme 6 Laboratorio de Control 2Brayan RoqueAún no hay calificaciones
- Supervisión AmbientalDocumento10 páginasSupervisión AmbientalRogelio Lazo ArjonaAún no hay calificaciones
- CP1 Control Temperatura FloresOmar 8AM2Documento13 páginasCP1 Control Temperatura FloresOmar 8AM2Isai SanchezAún no hay calificaciones
- EXAMDocumento6 páginasEXAMDanielaAún no hay calificaciones
- 203041-1 - Fase 4 - David BolañoDocumento20 páginas203041-1 - Fase 4 - David BolañodabAún no hay calificaciones
- CP1 Temperatura LCDocumento8 páginasCP1 Temperatura LCIsai SanchezAún no hay calificaciones
- Unidad 3 Simulación y EjerciciosDocumento25 páginasUnidad 3 Simulación y EjerciciosSalimAún no hay calificaciones
- PARTE B Monografia Siatema de Control DigitalDocumento21 páginasPARTE B Monografia Siatema de Control DigitalAngelGuerreroAún no hay calificaciones
- Sistemas de Instrumentación y Control en Procesos IndustrialesDocumento14 páginasSistemas de Instrumentación y Control en Procesos Industrialeskarol ximena perlaza villegasAún no hay calificaciones
- Actividad en Clase ControlDocumento12 páginasActividad en Clase ControlDiegoandres RestrepogalvanAún no hay calificaciones
- LAB4 Control2Documento20 páginasLAB4 Control2Diego ZMAún no hay calificaciones
- Sintonizacion de ControladoresDocumento31 páginasSintonizacion de ControladoresGiovanny CifuentesAún no hay calificaciones
- Actividad en Clase ControlDocumento13 páginasActividad en Clase ControlDiegoandres RestrepogalvanAún no hay calificaciones
- Comp LGR 05Documento50 páginasComp LGR 05Ricardo RodríguezAún no hay calificaciones
- Segundo Metodo de ZieglerDocumento4 páginasSegundo Metodo de ZieglerJ Carlos QuisbertAún no hay calificaciones
- Implementar lazo de control cerrado PI sobre proceso RCDocumento9 páginasImplementar lazo de control cerrado PI sobre proceso RCmaquina1Aún no hay calificaciones
- Fase4 Grupo243014 11Documento9 páginasFase4 Grupo243014 11Johan PerezAún no hay calificaciones
- Problema 9.1Documento49 páginasProblema 9.1JOSE DAVID MARTINEZ MENCO ESTUDIANTEAún no hay calificaciones
- Control Automatico 1Documento15 páginasControl Automatico 1Gabriel VeraAún no hay calificaciones
- Laboratorio N°4 Control de ProcesosDocumento30 páginasLaboratorio N°4 Control de ProcesosAlberto Miguel Quispe LimaAún no hay calificaciones
- Método Ziegler-Nichols para control PIDDocumento6 páginasMétodo Ziegler-Nichols para control PIDRoger Mauricio Garcia JimenezAún no hay calificaciones
- Informe 6 Laboratorio de Control 2Documento20 páginasInforme 6 Laboratorio de Control 2gonzaloAún no hay calificaciones
- Diagramas de Bode para análisis de estabilidad de un sistema de control proporcional de motorDocumento6 páginasDiagramas de Bode para análisis de estabilidad de un sistema de control proporcional de motorAndres FloresAún no hay calificaciones
- Fase 4 Grupo 3Documento11 páginasFase 4 Grupo 3hound77Aún no hay calificaciones
- Laboratorio N°1 Control de ProcesosDocumento11 páginasLaboratorio N°1 Control de ProcesosNico PerezAún no hay calificaciones
- Control de Cascada y RealimentaciónDocumento30 páginasControl de Cascada y RealimentaciónjimAún no hay calificaciones
- Laboratori N°6 Sintonizacion Por Lazo CerradoDocumento20 páginasLaboratori N°6 Sintonizacion Por Lazo CerradoAlberto Miguel Quispe LimaAún no hay calificaciones
- Métodos de Ziegler y NicholsDocumento13 páginasMétodos de Ziegler y NicholsMontero Luis AlejandroAún no hay calificaciones
- Tabla HilosxPulgada BMDocumento4 páginasTabla HilosxPulgada BMNelson Barrientos RodríguezAún no hay calificaciones
- Oposiciones 2000. Tecnología. ExtremaduraDocumento8 páginasOposiciones 2000. Tecnología. ExtremaduraPilar Escobar MoyaAún no hay calificaciones
- Examen 2Documento35 páginasExamen 2Victoria ZerpaAún no hay calificaciones
- 1.3 Diseño Del Controlador en Atraso de Fase y PIDocumento42 páginas1.3 Diseño Del Controlador en Atraso de Fase y PIleonardo ninanya yupanquiAún no hay calificaciones
- Laboratorio 7 - BatistaDocumento7 páginasLaboratorio 7 - BatistaArlyn BatistaAún no hay calificaciones
- INFORMEPREVIOEXP4Documento11 páginasINFORMEPREVIOEXP4Gabriela MoralesAún no hay calificaciones
- ProblemasResueltos SegundoParcialDocumento13 páginasProblemasResueltos SegundoParcialdperello2002Aún no hay calificaciones
- Solución Capitulo 5Documento12 páginasSolución Capitulo 5GianCarlo Espinoza ParionaAún no hay calificaciones
- Implementación de controladores PID en proceso industrialDocumento16 páginasImplementación de controladores PID en proceso industrialCarlos Calle LoveraAún no hay calificaciones
- Problemas ExPDocumento15 páginasProblemas ExPAlfredo GsAún no hay calificaciones
- Lab06 Pid1Documento13 páginasLab06 Pid1Mario Alberto Molina PandiaAún no hay calificaciones
- Ayudantia 4Documento8 páginasAyudantia 4Benjamín Troncoso GonzálezAún no hay calificaciones
- Quiz6 I 2007Documento5 páginasQuiz6 I 2007david fallasAún no hay calificaciones
- Control de velocidad de motores DVDDocumento9 páginasControl de velocidad de motores DVDGademara100% (1)
- Trabajo Sistema2Documento7 páginasTrabajo Sistema2Alvaro_20Aún no hay calificaciones
- Eva - 6B Alan Nuñez 189522053Documento9 páginasEva - 6B Alan Nuñez 189522053Alan NuñezAún no hay calificaciones
- Ingenieria de ControlDocumento74 páginasIngenieria de ControlStalin YaguanaAún no hay calificaciones
- Informe Pid Planta Posicion 2Documento6 páginasInforme Pid Planta Posicion 2Francisco Joven-MunarAún no hay calificaciones
- II Pao 2t 2022 Tarea4Documento6 páginasII Pao 2t 2022 Tarea4Erick GonzalezAún no hay calificaciones
- Lab 09 Sintonizacion PID Metodo de OscilacionDocumento8 páginasLab 09 Sintonizacion PID Metodo de OscilacionJherson Miranda CabanillasAún no hay calificaciones
- Requerimientos de Diseño Del Controlador PIDDocumento5 páginasRequerimientos de Diseño Del Controlador PIDRamon TorresAún no hay calificaciones
- MetodologíaDocumento4 páginasMetodologíavicvargas1096Aún no hay calificaciones
- Ziegler - NicholsDocumento10 páginasZiegler - NicholsgorAún no hay calificaciones
- Exámenes Control2Documento7 páginasExámenes Control2Hugo Quezada AlegríaAún no hay calificaciones
- Lab 03 Sintonizacion PID Z N Metodo de Oscilacion PDFDocumento7 páginasLab 03 Sintonizacion PID Z N Metodo de Oscilacion PDFKAL ALLEN CORVENAún no hay calificaciones
- Modelar y Simular Punto 2Documento39 páginasModelar y Simular Punto 2PedroJoseAún no hay calificaciones
- Archivo ControlDocumento13 páginasArchivo ControlLucio Mamani CentenoAún no hay calificaciones
- Trabajo 3Documento16 páginasTrabajo 3Gabriel VeraAún no hay calificaciones
- Control neuronal y difuso para sistemas fotovoltaicosDe EverandControl neuronal y difuso para sistemas fotovoltaicosAún no hay calificaciones
- Viscosidad método BrookfieldDocumento4 páginasViscosidad método BrookfieldJoaozinhoMéndezAún no hay calificaciones
- Ingeniería Económica - Razones SimplesDocumento32 páginasIngeniería Económica - Razones SimplesJosé Carlos DesalesAún no hay calificaciones
- TC3 Notas 2Documento9 páginasTC3 Notas 2José Carlos DesalesAún no hay calificaciones
- ViscosimetroDocumento5 páginasViscosimetroJosé Carlos DesalesAún no hay calificaciones
- Mate Fin - DesbloqueadoDocumento170 páginasMate Fin - DesbloqueadoAnDy FiTzAún no hay calificaciones
- Practica 5 2020Documento36 páginasPractica 5 2020José Carlos DesalesAún no hay calificaciones
- Mapa Mental FlujoDocumento1 páginaMapa Mental FlujoJosé Carlos DesalesAún no hay calificaciones
- Desales Gonzalez Jose Carlos - Proyecto Final - 5am1Documento3 páginasDesales Gonzalez Jose Carlos - Proyecto Final - 5am1José Carlos DesalesAún no hay calificaciones
- Practica 5 2020Documento36 páginasPractica 5 2020José Carlos DesalesAún no hay calificaciones
- Prac 1 Desales GonzalezDocumento38 páginasPrac 1 Desales GonzalezJosé Carlos DesalesAún no hay calificaciones
- RNE: Simulación y desarrollo de una red neuronal desde ceroDocumento17 páginasRNE: Simulación y desarrollo de una red neuronal desde ceroJosé Carlos DesalesAún no hay calificaciones
- Practica 1Documento14 páginasPractica 1José Carlos DesalesAún no hay calificaciones
- Conceptos básicos de instrumentación industrialDocumento12 páginasConceptos básicos de instrumentación industrialJosé Carlos DesalesAún no hay calificaciones
- José Carlos Desales GonzalezDocumento1 páginaJosé Carlos Desales GonzalezJosé Carlos DesalesAún no hay calificaciones
- 05 2014 PDFDocumento72 páginas05 2014 PDFPaul Reyna RojasAún no hay calificaciones
- MP NRF 193 PemexDocumento1 páginaMP NRF 193 PemexJosé Carlos DesalesAún no hay calificaciones
- Secador de Tipo CharolaDocumento5 páginasSecador de Tipo CharolaJosé Carlos DesalesAún no hay calificaciones
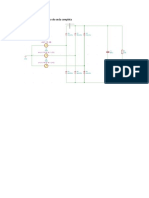
- Circuito Rectificador Trifásico de Onda CompletaDocumento1 páginaCircuito Rectificador Trifásico de Onda CompletaJosé Carlos DesalesAún no hay calificaciones
- LTC3 P2Documento3 páginasLTC3 P2José Carlos DesalesAún no hay calificaciones
- Implementacion Electronica para La Mejora en La Identificacion Visual de Las Estaciones Del Fuselaje en Una AeronaveDocumento7 páginasImplementacion Electronica para La Mejora en La Identificacion Visual de Las Estaciones Del Fuselaje en Una AeronaveJosé Carlos DesalesAún no hay calificaciones
- Prac 2 Desales GonzalezDocumento10 páginasPrac 2 Desales GonzalezJosé Carlos DesalesAún no hay calificaciones
- Examen Primer ParcialDocumento15 páginasExamen Primer ParcialJosé Carlos DesalesAún no hay calificaciones
- Compensador por retro de estados estimados mediante un observador para un sistema de péndulo invertidoDocumento5 páginasCompensador por retro de estados estimados mediante un observador para un sistema de péndulo invertidoJosé Carlos DesalesAún no hay calificaciones
- Mecanica Industrial PDFDocumento67 páginasMecanica Industrial PDFJuan Luis Hernandez MendezAún no hay calificaciones
- Cuestionario 2Documento10 páginasCuestionario 2José Carlos DesalesAún no hay calificaciones
- 7am3-T2-Desales Gonzalez José CarlosDocumento1 página7am3-T2-Desales Gonzalez José CarlosJosé Carlos DesalesAún no hay calificaciones
- Mecanica Industrial PDFDocumento67 páginasMecanica Industrial PDFJuan Luis Hernandez MendezAún no hay calificaciones
- LTC3 P2Documento3 páginasLTC3 P2José Carlos DesalesAún no hay calificaciones
- Ejercicios EigenDocumento26 páginasEjercicios EigenJosé Carlos DesalesAún no hay calificaciones
- TALLER 2 Física Mecánica 2017-2Documento2 páginasTALLER 2 Física Mecánica 2017-2Robert Alexander TasconAún no hay calificaciones
- Política compras insumos OCATIDocumento2 páginasPolítica compras insumos OCATIDiana AvendañoAún no hay calificaciones
- Formato TareasDocumento3 páginasFormato TareasKlever AcaroAún no hay calificaciones
- Ingles PlaneacionDocumento2 páginasIngles PlaneacionLuz Flores CastañedaAún no hay calificaciones
- LyL TEMA 4 PDFDocumento20 páginasLyL TEMA 4 PDFAngela CuelloAún no hay calificaciones
- Rutinas de 1 Segundo Speed MemoryDocumento1 páginaRutinas de 1 Segundo Speed Memoryulises santiagoAún no hay calificaciones
- Ciencias Naturales y Importancia de La BiologiaDocumento20 páginasCiencias Naturales y Importancia de La Biologialues enrique BERROTERANAún no hay calificaciones
- Mantequilla y Mayonesa-ExposiciónDocumento24 páginasMantequilla y Mayonesa-ExposiciónPaola remeAún no hay calificaciones
- Trabajo FinalDocumento38 páginasTrabajo FinalJosué RodriguezAún no hay calificaciones
- VoleibolDocumento9 páginasVoleiboljhomar45598Aún no hay calificaciones
- Cotizacion Gestion CorponariñoDocumento1 páginaCotizacion Gestion CorponariñoChristian David Tapia LeonAún no hay calificaciones
- Act 02-03. Mapa Conceptual Yo Mental Sobre Términos y Definiciones ISO 140012015.Documento4 páginasAct 02-03. Mapa Conceptual Yo Mental Sobre Términos y Definiciones ISO 140012015.Gabriel García OrtizAún no hay calificaciones
- Natalidad MM Mi 2010 2019Documento107 páginasNatalidad MM Mi 2010 2019María Elena González Sal y RosasAún no hay calificaciones
- Cómo Ser Más ProductivoDocumento4 páginasCómo Ser Más Productivobernardo guevaraAún no hay calificaciones
- 2 CarsaDocumento2 páginas2 CarsaSamuel BustillosAún no hay calificaciones
- Analisis Fisico Quimicos A Tres Jugos de Naranja Industrial de Diferentes MarcasDocumento28 páginasAnalisis Fisico Quimicos A Tres Jugos de Naranja Industrial de Diferentes MarcasMichael TamiAún no hay calificaciones
- Ecocardiografia Clinica - Claudio Almonte Germán PDFDocumento353 páginasEcocardiografia Clinica - Claudio Almonte Germán PDFDaniel PolancoAún no hay calificaciones
- Posiciones de Montage ReductoresDocumento2 páginasPosiciones de Montage ReductoresIván CascudoAún no hay calificaciones
- Patologias en EdificacionesDocumento2 páginasPatologias en EdificacionesGian Marco CerezoAún no hay calificaciones
- Toma de Decisiones Eje 3Documento16 páginasToma de Decisiones Eje 3Angie lorena Torres rodriguezAún no hay calificaciones
- Informe Técnico EvaluaciónDocumento16 páginasInforme Técnico EvaluaciónCRISTINA . ELGUETA ALVAREZAún no hay calificaciones
- Motilidad Del Sistema DigestivoDocumento15 páginasMotilidad Del Sistema DigestivoSonyuska ReyesAún no hay calificaciones
- Vocabulario Del TrabajoDocumento5 páginasVocabulario Del TrabajoRuben OrtegaAún no hay calificaciones
- Correo Propuesta Rebajas de ClasificadoresDocumento1 páginaCorreo Propuesta Rebajas de ClasificadoresJack Robert Meza SanchezAún no hay calificaciones
- Límites convergentes: subducción y magmatismoDocumento30 páginasLímites convergentes: subducción y magmatismoRaúl González ParedesAún no hay calificaciones
- Exploracion Del EntornoDocumento5 páginasExploracion Del EntornoJAiro Contreras CAún no hay calificaciones
- Competencias Digitales en Los Bachilleres XXIDocumento6 páginasCompetencias Digitales en Los Bachilleres XXIjuan_mglezAún no hay calificaciones
- Seminario Modelos PedagogicosDocumento20 páginasSeminario Modelos PedagogicosGuillermo Merlano OrtegaAún no hay calificaciones
- Manual de Electronica John MarckusDocumento3 páginasManual de Electronica John MarckusWilliam Fernando Patiño CalderonAún no hay calificaciones