También podría gustarte
- S04.s2-MaterialDocumento19 páginasS04.s2-MaterialMichael MayoAún no hay calificaciones
- 1.19. Cinemática Plana de Un Cuerpo RígidoDocumento14 páginas1.19. Cinemática Plana de Un Cuerpo RígidoBryan Casanova100% (1)
- Mov. Circular IABDocumento23 páginasMov. Circular IABEdgard Sebastian Mantilla TapiaAún no hay calificaciones
- 2.4 AceleraciónDocumento16 páginas2.4 AceleraciónDav SerAún no hay calificaciones
- 1.2 Movimiento Curvilineo (ED) - RotadoDocumento7 páginas1.2 Movimiento Curvilineo (ED) - RotadoLalo Almeida DelgadoAún no hay calificaciones
- 1305 e - 1P05 Movimiento AngularDocumento21 páginas1305 e - 1P05 Movimiento AngularSarahi DueñasAún no hay calificaciones
- Practica 4 Lab de Cinemática y DinámicaDocumento17 páginasPractica 4 Lab de Cinemática y DinámicaYahir EmbarcaederoAún no hay calificaciones
- RotacionesDocumento113 páginasRotacionesfelicastagnoAún no hay calificaciones
- Capitulo 9 - Luna MisaelDocumento4 páginasCapitulo 9 - Luna MisaelJUAN PABLO DELGADILLO GOCHEAún no hay calificaciones
- Movimiento circunferencial en física 1Documento17 páginasMovimiento circunferencial en física 1Jotacheq NacionalAún no hay calificaciones
- 7-Movimiento Circular Uniformemente AceleradoDocumento5 páginas7-Movimiento Circular Uniformemente Aceleradomejileonardo960% (1)
- Investigación CinemáticaDocumento9 páginasInvestigación CinemáticaRICHAR STIBEN MOLINA MONAGAAún no hay calificaciones
- Física I CIBEX - Cinemática y dinámica del movimiento circular_348abb77306fb23905e155168ccb372bDocumento13 páginasFísica I CIBEX - Cinemática y dinámica del movimiento circular_348abb77306fb23905e155168ccb372bFrank FerreiraAún no hay calificaciones
- M C U ADocumento3 páginasM C U AAlex RojasAún no hay calificaciones
- Movimiento Circular Uniformemente AceleradoDocumento25 páginasMovimiento Circular Uniformemente AceleradoJuan Manuel BenavidesAún no hay calificaciones
- Informe de Laboratorio, Movimiento Circular PDFDocumento5 páginasInforme de Laboratorio, Movimiento Circular PDFANGEL CAMILO CONTRERAS BERNALAún no hay calificaciones
- Movimiento CurvilineoDocumento6 páginasMovimiento CurvilineoAwdy GarciaAún no hay calificaciones
- Ecuaciones del movimiento en coordenadas tangencial y normalDocumento8 páginasEcuaciones del movimiento en coordenadas tangencial y normalthe hole in the strawAún no hay calificaciones
- Resumen Tema 6Documento7 páginasResumen Tema 6AnaAún no hay calificaciones
- Dinámica - Cinemática de Una PartículaDocumento48 páginasDinámica - Cinemática de Una PartículaAdalberto VizcondeAún no hay calificaciones
- Tema 2. Cinemática Del Sólido RígidoDocumento53 páginasTema 2. Cinemática Del Sólido RígidoAustinAún no hay calificaciones
- Analisis de VelocidadDocumento14 páginasAnalisis de VelocidadKATEREAún no hay calificaciones
- U8 CinemáticaDocumento16 páginasU8 CinemáticaMaría José Chocó gomezAún no hay calificaciones
- Ecuaciones de movimiento y cinemáticaDocumento12 páginasEcuaciones de movimiento y cinemáticaGonzalo LezooAún no hay calificaciones
- Presentación Clase 2 EfeDocumento79 páginasPresentación Clase 2 Efejordy jeremy González peñafielAún no hay calificaciones
- MCU y MCUADocumento34 páginasMCU y MCUAMercy TilleriaAún no hay calificaciones
- Practico de Fisica MRU MRUVDocumento12 páginasPractico de Fisica MRU MRUVJoak1ng xAún no hay calificaciones
- Facultad de Ingenieria Civil: Universidad Cesar VallejoDocumento23 páginasFacultad de Ingenieria Civil: Universidad Cesar VallejoNELSON PATRICK PARDAVE FERNANDEZAún no hay calificaciones
- Cinemática cuerpo sólidoDocumento48 páginasCinemática cuerpo sólidoEdwin Angel Campos SanchezAún no hay calificaciones
- Cinematica de La ParticulaDocumento52 páginasCinematica de La ParticulaJesus VeredaAún no hay calificaciones
- Cómo funciona el cinemómetroDocumento19 páginasCómo funciona el cinemómetroChristian RodriguezAún no hay calificaciones
- 01 Cinemática de Partículas 2 PDFDocumento27 páginas01 Cinemática de Partículas 2 PDFJulianAyalaAún no hay calificaciones
- Act2 ResumenDocumento6 páginasAct2 ResumenMario VargasAún no hay calificaciones
- Movimiento circular constanteDocumento5 páginasMovimiento circular constanteLuis PerníaAún no hay calificaciones
- Guía para Estudiar Cinemática - Capitulos 2 y 4 de SerwayDocumento8 páginasGuía para Estudiar Cinemática - Capitulos 2 y 4 de SerwaySofíaAún no hay calificaciones
- LC Movimiento CircularDocumento3 páginasLC Movimiento Circularmiguel pormaAún no hay calificaciones
- S04.s2 - MaterialDocumento31 páginasS04.s2 - MaterialAlejandro MoAún no hay calificaciones
- Laboratorio 2Documento16 páginasLaboratorio 2DEIBER FABIAN CONEJO SANCHEZAún no hay calificaciones
- 1) Notas Dinámica de Cuerpo RígidoDocumento116 páginas1) Notas Dinámica de Cuerpo RígidoValee Aguilar BernalAún no hay calificaciones
- 1.4 Movimiento Curvilíneo - Componentes Normal y TangencialDocumento10 páginas1.4 Movimiento Curvilíneo - Componentes Normal y TangencialdavidAún no hay calificaciones
- Presentacion 9 ABPDocumento13 páginasPresentacion 9 ABPDiego Jean PierreAún no hay calificaciones
- S04.s2 - PPT CLASE MCDocumento16 páginasS04.s2 - PPT CLASE MCLEIDYAún no hay calificaciones
- Movimiento RotacionalDocumento11 páginasMovimiento RotacionalMauricio Medrano MaciasAún no hay calificaciones
- SESIÓN 03-PPTDocumento31 páginasSESIÓN 03-PPTllefer.correa.rAún no hay calificaciones
- Biomecánica: Movimientos y FuerzasDocumento25 páginasBiomecánica: Movimientos y FuerzasM A Parra CaperaAún no hay calificaciones
- Informe - Movimiento Curvilíneo de ParticulasDocumento10 páginasInforme - Movimiento Curvilíneo de ParticulasFrancis CorreaAún no hay calificaciones
- Fisica 11 A y B 2021Documento16 páginasFisica 11 A y B 2021Pamela BorjaAún no hay calificaciones
- Facultad de Ingenieria: DinámicaDocumento20 páginasFacultad de Ingenieria: DinámicaJulio jose More RebolledoAún no hay calificaciones
- Cinematica de ParticulasDocumento18 páginasCinematica de ParticulasItzel Sujey CG100% (1)
- Documento Informe Nº5Documento12 páginasDocumento Informe Nº5Guido Velasquez OrellanaAún no hay calificaciones
- Tema 2Documento38 páginasTema 2MrPezetaAún no hay calificaciones
- Análisis de velocidad en máquinasDocumento13 páginasAnálisis de velocidad en máquinasAladin FacturaciónAún no hay calificaciones
- S01. s3 - MATERIAL 2Documento17 páginasS01. s3 - MATERIAL 2Christian RodriguezAún no hay calificaciones
- 3er Año. Guía Teórico-Práctica. Movimiento Rectilíneo Uniforme Variado.Documento17 páginas3er Año. Guía Teórico-Práctica. Movimiento Rectilíneo Uniforme Variado.rogeralexqbAún no hay calificaciones
- UD5 Movimiento armónico simple AVDocumento10 páginasUD5 Movimiento armónico simple AVKEKO 828Aún no hay calificaciones
- Diapositivas de La Clase - Movimiento Con Aceleracion Constante PDFDocumento19 páginasDiapositivas de La Clase - Movimiento Con Aceleracion Constante PDFRoel DextreAún no hay calificaciones
- FS - Cinematica Bidimensional-02-Movimiento CircularDocumento7 páginasFS - Cinematica Bidimensional-02-Movimiento CircularDaniel OrtizAún no hay calificaciones
- Principios de transferencia de cantidad de movimientoDe EverandPrincipios de transferencia de cantidad de movimientoAún no hay calificaciones
- 03 U3 1M FísicaDocumento1 página03 U3 1M Físicafelipe sanchezAún no hay calificaciones
- Estructuras cósmicasDocumento11 páginasEstructuras cósmicasfelipe sanchezAún no hay calificaciones
- 1 Medio - Fisica - Guia 9 - k2Documento5 páginas1 Medio - Fisica - Guia 9 - k2felipe sanchezAún no hay calificaciones
- Prueba 2 SMMD01 860Documento5 páginasPrueba 2 SMMD01 860Alejandro ViverosAún no hay calificaciones
- 03 U3 1M FísicaDocumento3 páginas03 U3 1M Físicafelipe sanchezAún no hay calificaciones
- Mecanica Dinamica MOV CIRCULARDocumento34 páginasMecanica Dinamica MOV CIRCULARfelipe sanchezAún no hay calificaciones
- Ondas 1Documento2 páginasOndas 1Francisco Garnham CabezasAún no hay calificaciones
- Eval 02 Pauta P2021 866Documento41 páginasEval 02 Pauta P2021 866felipe sanchezAún no hay calificaciones
- Metodos de Energia 25-10-2021Documento26 páginasMetodos de Energia 25-10-2021felipe sanchezAún no hay calificaciones
- Actividad Recuperativa 2 SMMD01 866Documento4 páginasActividad Recuperativa 2 SMMD01 866felipe sanchezAún no hay calificaciones
- Actividad Recuperativa 2 SMMD01 866Documento4 páginasActividad Recuperativa 2 SMMD01 866felipe sanchezAún no hay calificaciones
- DocumentoDocumento1 páginaDocumentofelipe sanchezAún no hay calificaciones
- TareaDocumento2 páginasTareafelipe sanchezAún no hay calificaciones
- El magnetismo y electromagnetismo: fenómenos clave de la electrónicaDocumento12 páginasEl magnetismo y electromagnetismo: fenómenos clave de la electrónicaNaidelinAún no hay calificaciones
- AristótelesDocumento3 páginasAristótelesJesus Gabriel Mantilla QuispeAún no hay calificaciones
- AllanDocumento4 páginasAllanAllan GomezAún no hay calificaciones
- Generador CA principio FaradayDocumento5 páginasGenerador CA principio FaradayJhon Fernando NiñoAún no hay calificaciones
- 2° Geo Semana 15 Sistema SolarDocumento4 páginas2° Geo Semana 15 Sistema SolarEvelin NaciraAún no hay calificaciones
- Guia Matematicas Once Primer PeriodoDocumento29 páginasGuia Matematicas Once Primer Periodoゴンサレス リカルドAún no hay calificaciones
- Guía N°9. Circuitos EléctricosDocumento3 páginasGuía N°9. Circuitos EléctricosCarolina mAún no hay calificaciones
- Taller de CalorDocumento4 páginasTaller de CalorHenry SanchezAún no hay calificaciones
- Modulo MovimientoDocumento10 páginasModulo MovimientoPachoB13Aún no hay calificaciones
- PROYECCIONESDocumento14 páginasPROYECCIONESAarón Harold CollasAún no hay calificaciones
- Ley Mayer capacidades caloríficas gas idealDocumento3 páginasLey Mayer capacidades caloríficas gas idealSandra Flores VargasAún no hay calificaciones
- Ejercicio Elementos de Máquinas IDocumento8 páginasEjercicio Elementos de Máquinas IPedro50% (2)
- TALLER ILUMINACIÓN Punto 2Documento4 páginasTALLER ILUMINACIÓN Punto 2Keiner MartinezAún no hay calificaciones
- GRUPO 5 EXPO (Medidores de Flujo Ultrasónico) FinalDocumento14 páginasGRUPO 5 EXPO (Medidores de Flujo Ultrasónico) FinalJuan RivadeneiraAún no hay calificaciones
- Taller Final-BMyE-Corte 1Documento2 páginasTaller Final-BMyE-Corte 1juandparrapAún no hay calificaciones
- Mapa Mental Campos Magneticos David HerreraDocumento2 páginasMapa Mental Campos Magneticos David HerreraDavid HerreraAún no hay calificaciones
- Corrosión y degradación de materialesDocumento18 páginasCorrosión y degradación de materialesCarlos LastiriAún no hay calificaciones
- Trazado de La Derrota OceánicaDocumento33 páginasTrazado de La Derrota OceánicajaimitoAún no hay calificaciones
- Problemas Mvto 2D 2021Documento4 páginasProblemas Mvto 2D 2021David Leonardo DiazAún no hay calificaciones
- Ejercicios CalculoDocumento7 páginasEjercicios CalculoStar BlueAún no hay calificaciones
- Prueba 1 2020Documento10 páginasPrueba 1 2020Ferdi VaroroAún no hay calificaciones
- Calendario de Aplicación de Curso IntersemestralDocumento1 páginaCalendario de Aplicación de Curso IntersemestralAlberto Emiliano Bravo NicolasAún no hay calificaciones
- OyC Semana 03Documento23 páginasOyC Semana 03Dennis Diaz TrujilloAún no hay calificaciones
- Atomo MedicinaDocumento2 páginasAtomo MedicinaRoy J. YshtayAún no hay calificaciones
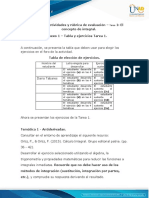
- Anexo 1 - Tabla y Ejercicios Tarea 1Documento8 páginasAnexo 1 - Tabla y Ejercicios Tarea 1Dairo TabaresAún no hay calificaciones
- Practica Trituracion y Molienda Tec LagunaDocumento22 páginasPractica Trituracion y Molienda Tec LagunaBrenda Nollely ReyesAún no hay calificaciones
- Ejercicios Matematica 6Documento36 páginasEjercicios Matematica 6Escuela Superior Luis Pales MatosAún no hay calificaciones
- Sistemas de bombeo de agua y su aplicación en proyectos de dibujo técnicoDocumento5 páginasSistemas de bombeo de agua y su aplicación en proyectos de dibujo técnicoAlfred Alave CastilloAún no hay calificaciones
- Educacion Química Cambio ConceptualDocumento11 páginasEducacion Química Cambio ConceptualBrendaPonceAún no hay calificaciones
- Clasificados 22.04.22Documento4 páginasClasificados 22.04.22Nicolás Dante Di FioriAún no hay calificaciones