También podría gustarte
- Administrador de Plataformas Digitales de AprendizajeDocumento112 páginasAdministrador de Plataformas Digitales de AprendizajeDIEGO ALMARIO95% (21)
- Modelado y Control Cinemático de Un Robot de Seis Grados de Libertad (KUKA120)Documento25 páginasModelado y Control Cinemático de Un Robot de Seis Grados de Libertad (KUKA120)Morgan G. Vásquez100% (5)
- Soluciones computacionales para problemas de automatización con robotsDocumento40 páginasSoluciones computacionales para problemas de automatización con robotsALMACEN UFPSOAún no hay calificaciones
- Métodos Matriciales para ingenieros con MATLABDe EverandMétodos Matriciales para ingenieros con MATLABCalificación: 5 de 5 estrellas5/5 (1)
- TAREA 1 - Cristian Camilo Contreras DiazDocumento10 páginasTAREA 1 - Cristian Camilo Contreras Diazcristian camilo contreras diazAún no hay calificaciones
- Tarea 3 - Presentar Evaluación Ecuaciones Diferenciales de Primer Orden y Orden SuperiorDocumento4 páginasTarea 3 - Presentar Evaluación Ecuaciones Diferenciales de Primer Orden y Orden SuperiorJairo Ricardo Alvarez Ortiz100% (2)
- Tarea 3 - Presentar Evaluación Ecuaciones Diferenciales de Primer Orden y Orden SuperiorDocumento4 páginasTarea 3 - Presentar Evaluación Ecuaciones Diferenciales de Primer Orden y Orden SuperiorJairo Ricardo Alvarez Ortiz100% (2)
- Adjunto 2 202110441428246Documento9 páginasAdjunto 2 202110441428246Jose Manuel Leon BailenAún no hay calificaciones
- Informe 1 Robo2 FinalDocumento24 páginasInforme 1 Robo2 FinalWILLIAM BERRIOS ROJASAún no hay calificaciones
- Avance ProyectoRoboticaDocumento11 páginasAvance ProyectoRoboticaEduardo Antonio Guzmán OrtizAún no hay calificaciones
- Informe 8Documento15 páginasInforme 8Cobalt DevilAún no hay calificaciones
- Aplicación de Cinemática DirectaDocumento12 páginasAplicación de Cinemática DirectaEduardo ArriagaAún no hay calificaciones
- Soluciones computacionales a problemas de robótica avanzadaDocumento7 páginasSoluciones computacionales a problemas de robótica avanzadaoscar rodriguezAún no hay calificaciones
- Obtención de las consignas de velocidades articulares del robot DENSO VP-6242G mediante simulación en MatLabDocumento23 páginasObtención de las consignas de velocidades articulares del robot DENSO VP-6242G mediante simulación en MatLabIvan NavaAún no hay calificaciones
- Práctica - Integrales de Línea - 2020Documento9 páginasPráctica - Integrales de Línea - 2020Keinsy GonzálezAún no hay calificaciones
- Control Cinemática de VelocidadDocumento20 páginasControl Cinemática de VelocidadJose Maximo Alvarado OyolaAún no hay calificaciones
- Cinemática de Brazo Manipulador de 2 GDL SalomonDocumento8 páginasCinemática de Brazo Manipulador de 2 GDL Salomonjuanillofc100% (5)
- Cinemática Directa de Robots ManipuladoresDocumento10 páginasCinemática Directa de Robots ManipuladoresJosé Rubén Quitl RomeroAún no hay calificaciones
- Robotica e inteligencia artificial - Cinematica de robots industrialesDocumento5 páginasRobotica e inteligencia artificial - Cinematica de robots industrialesCristian UrrestaAún no hay calificaciones
- Practica2 Arte Cinematica InverasaDocumento18 páginasPractica2 Arte Cinematica InverasaMarcelo Vasquez GarciaAún no hay calificaciones
- Cinematica inversa de un robot 4GDLDocumento18 páginasCinematica inversa de un robot 4GDLPaola Maribel GuamanAún no hay calificaciones
- Soluciones computacionales para problemas de roboticaDocumento17 páginasSoluciones computacionales para problemas de roboticaelianaAún no hay calificaciones
- Colaborativo 2 Luis UrresteDocumento24 páginasColaborativo 2 Luis Urresteluis eduardo100% (1)
- Cinematica de RobotsDocumento6 páginasCinematica de RobotsIrvingValerianoAún no hay calificaciones
- Tarea 3Documento8 páginasTarea 3thedoctor xAún no hay calificaciones
- Af4-Arq Rob-1962235Documento9 páginasAf4-Arq Rob-1962235Juan PabloAún no hay calificaciones
- Analisis Cinematico Scara (Informe Ieee) .1 PDFDocumento8 páginasAnalisis Cinematico Scara (Informe Ieee) .1 PDFmisusibuAún no hay calificaciones
- Crea Robot Con MATLABDocumento10 páginasCrea Robot Con MATLABAndre Williams Montenegro SalcedoAún no hay calificaciones
- C2T27oA VazquezAdrielDocumento10 páginasC2T27oA VazquezAdrielVázquez Otero AdrielAún no hay calificaciones
- Robotica Laboratorio 3Documento9 páginasRobotica Laboratorio 3ALEJANDRA CAROLINA ROQUE QUISPEAún no hay calificaciones
- ELO 377 Control Por Torque Calculado de Un Robot SCARA de 3DOFDocumento5 páginasELO 377 Control Por Torque Calculado de Un Robot SCARA de 3DOFSebastián Céspedes SegoviaAún no hay calificaciones
- Diseño y Simulación Del Comportamiento de Un Robot Scara de 2 Grados de LibertadDocumento3 páginasDiseño y Simulación Del Comportamiento de Un Robot Scara de 2 Grados de LibertadDaniel_19938Aún no hay calificaciones
- Cinemática DirectaDocumento30 páginasCinemática DirectajuanantoniorojasAún no hay calificaciones
- Puma Fase2Documento49 páginasPuma Fase2Danilo ColoradoAún no hay calificaciones
- Fase 2 - Wilderman ArandaDocumento12 páginasFase 2 - Wilderman ArandaAndres PizoAún no hay calificaciones
- Lab6 Gutierrez Rivera PumaDocumento12 páginasLab6 Gutierrez Rivera PumaAnthony CardenasAún no hay calificaciones
- Sistemas Automáticos - Ingeniería EléctricaDocumento3 páginasSistemas Automáticos - Ingeniería EléctricaAlberto RoyoAún no hay calificaciones
- Colaborativo 2 LuisurrestedocxDocumento24 páginasColaborativo 2 LuisurrestedocxMaiker CadenaAún no hay calificaciones
- Proyecto Biela Manivela Corredera ExcentricoDocumento17 páginasProyecto Biela Manivela Corredera ExcentricoPotterGamePlaysAún no hay calificaciones
- Julio 2022 Sol PDFDocumento4 páginasJulio 2022 Sol PDFSofíaAún no hay calificaciones
- Trayectoria Robot Diferencial MatlabDocumento8 páginasTrayectoria Robot Diferencial Matlabroberto palaciosAún no hay calificaciones
- J Ho NNNNNNN NNNNNNNNNDocumento21 páginasJ Ho NNNNNNN NNNNNNNNNgustavoAún no hay calificaciones
- Practica 07 Conversion de ModelosDocumento4 páginasPractica 07 Conversion de Modeloscesar Dice HolaAún no hay calificaciones
- Informe 5 - Arias Vargas Karen Rivera Duenas Jose y Zevallos Zegarra RocioDocumento28 páginasInforme 5 - Arias Vargas Karen Rivera Duenas Jose y Zevallos Zegarra RocioJose OlazabalAún no hay calificaciones
- Sesion 10Documento11 páginasSesion 10Ortensio Cordova CordovaAún no hay calificaciones
- Clase 1Documento5 páginasClase 1PruebaAún no hay calificaciones
- Cinematica Del RobotDocumento28 páginasCinematica Del Robotdrake JonasAún no hay calificaciones
- Aplicaciones La Transformada de LaplaceDocumento22 páginasAplicaciones La Transformada de LaplaceOmar SaborioAún no hay calificaciones
- 1er Parcial 2do Taller PDFDocumento2 páginas1er Parcial 2do Taller PDFCristian Bravo MartinezAún no hay calificaciones
- TareaN4 RoboticaAplicadaDocumento7 páginasTareaN4 RoboticaAplicadaAland BravoAún no hay calificaciones
- Tarea 4Documento3 páginasTarea 4Héctor Azcaray RiveraAún no hay calificaciones
- Proyecto 1 Bimestre (CS)Documento8 páginasProyecto 1 Bimestre (CS)Carlos AgilaAún no hay calificaciones
- Taller de Estudio 1Documento8 páginasTaller de Estudio 1juan pablo sandoval mejiaAún no hay calificaciones
- Introducción A La Robótica Desde La Ingeniería MecánicaDocumento11 páginasIntroducción A La Robótica Desde La Ingeniería MecánicajuanmanuelAún no hay calificaciones
- Sa - 2021-09-03Documento2 páginasSa - 2021-09-03Diego GutiérrezAún no hay calificaciones
- ANGELODocumento28 páginasANGELOPaul CevallosAún no hay calificaciones
- Paso2 Grupo299012 3Documento17 páginasPaso2 Grupo299012 3joanAún no hay calificaciones
- GHHJHGJDocumento14 páginasGHHJHGJChristopher Calisaya EscobarAún no hay calificaciones
- Geometric modeling in computer: Aided geometric designDe EverandGeometric modeling in computer: Aided geometric designAún no hay calificaciones
- Aprender Autocad 2012 Avanzado con 100 ejercicios prácticosDe EverandAprender Autocad 2012 Avanzado con 100 ejercicios prácticosAún no hay calificaciones
- Robótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsDe EverandRobótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsAún no hay calificaciones
- UF1253 - Diagnóstico de deformaciones estructuralesDe EverandUF1253 - Diagnóstico de deformaciones estructuralesAún no hay calificaciones
- TAREA 1 - Cristian Camilo Contreras DiazDocumento2 páginasTAREA 1 - Cristian Camilo Contreras Diazcristian camilo contreras diazAún no hay calificaciones
- PASO 2 - Cristian Camilo Contreras DiazDocumento3 páginasPASO 2 - Cristian Camilo Contreras Diazcristian camilo contreras diazAún no hay calificaciones
- Tarea 3 - Grupal 7Documento39 páginasTarea 3 - Grupal 7cristian camilo contreras diazAún no hay calificaciones
- Formato Respuesta - Fase 1 - CRISTIAN CAMILO CONTRERAS DIAZDocumento4 páginasFormato Respuesta - Fase 1 - CRISTIAN CAMILO CONTRERAS DIAZcristian camilo contreras diazAún no hay calificaciones
- Pre Tarea - Cristian Camilo Contreras DiazDocumento22 páginasPre Tarea - Cristian Camilo Contreras Diazcristian camilo contreras diazAún no hay calificaciones
- TAREA 1 - Cristian Camilo Contreras DiazDocumento12 páginasTAREA 1 - Cristian Camilo Contreras Diazcristian camilo contreras diazAún no hay calificaciones
- PASO 1 - Robotica AvanzadaDocumento15 páginasPASO 1 - Robotica Avanzadacristian camilo contreras diazAún no hay calificaciones
- PASO 3 - Robotica Avanzada - Cristian Camilo Contreras DIazDocumento4 páginasPASO 3 - Robotica Avanzada - Cristian Camilo Contreras DIazcristian camilo contreras diaz100% (1)
- CNC: Conceptos básicos del control numérico computarizado y comparación de máquinas herramientaDocumento41 páginasCNC: Conceptos básicos del control numérico computarizado y comparación de máquinas herramientacristian camilo contreras diazAún no hay calificaciones
- TAREA 2 - Señales y SistemasDocumento30 páginasTAREA 2 - Señales y Sistemascristian camilo contreras diazAún no hay calificaciones
- FASE 1 - Cristian Camilo Contreras DiazDocumento2 páginasFASE 1 - Cristian Camilo Contreras Diazcristian camilo contreras diazAún no hay calificaciones
- PRE TAREA - Señales y SistemasDocumento10 páginasPRE TAREA - Señales y Sistemascristian camilo contreras diazAún no hay calificaciones
- PASO 2 - Robotica Avanzada - Cristian Camilo Contreras DIazDocumento12 páginasPASO 2 - Robotica Avanzada - Cristian Camilo Contreras DIazcristian camilo contreras diazAún no hay calificaciones
- TAREA 1 - Señales y SistemasDocumento28 páginasTAREA 1 - Señales y Sistemascristian camilo contreras diaz100% (1)
- Tarea - 2 - 203042 - 28Documento34 páginasTarea - 2 - 203042 - 28cristian camilo contreras diazAún no hay calificaciones
- PRE TAREA - Señales y SistemasDocumento10 páginasPRE TAREA - Señales y Sistemascristian camilo contreras diazAún no hay calificaciones
- TAREA 1 - Señales y SistemasDocumento28 páginasTAREA 1 - Señales y Sistemascristian camilo contreras diaz100% (1)
- Protocolo - Paso 2Documento15 páginasProtocolo - Paso 2cristian camilo contreras diazAún no hay calificaciones
- Fase 2 - TeatroDocumento5 páginasFase 2 - Teatrocristian camilo contreras diazAún no hay calificaciones
- Tarea 1 - Ecuaciones DiferencialesDocumento11 páginasTarea 1 - Ecuaciones Diferencialescristian camilo contreras diazAún no hay calificaciones
- PRE TAREA - TeatroDocumento10 páginasPRE TAREA - Teatrocristian camilo contreras diazAún no hay calificaciones
- Tarea 3Documento11 páginasTarea 3cristian camilo contreras diazAún no hay calificaciones
- Tarea 2 - Ecuaciones DiferencialesDocumento31 páginasTarea 2 - Ecuaciones Diferencialescristian camilo contreras diazAún no hay calificaciones
- Guía de Actividades y Rúbrica de Evaluación - Post-TareaDocumento11 páginasGuía de Actividades y Rúbrica de Evaluación - Post-TareajaiderAún no hay calificaciones
- Tarea 1 - Ecuaciones DiferencialesDocumento11 páginasTarea 1 - Ecuaciones Diferencialescristian camilo contreras diazAún no hay calificaciones
- Tarea 3Documento11 páginasTarea 3cristian camilo contreras diaz100% (1)
- 4 Pautas Bibliografia CSTADDocumento18 páginas4 Pautas Bibliografia CSTADmelvinAún no hay calificaciones
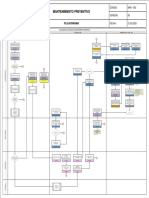
- Mantenimiento PreventivoDocumento1 páginaMantenimiento Preventivojuanchavarri_22Aún no hay calificaciones
- Conceptos Fundamentales de Gestión de RiesgosDocumento65 páginasConceptos Fundamentales de Gestión de RiesgoscristianAún no hay calificaciones
- LedierBustos - 70 - Tarea 5Documento20 páginasLedierBustos - 70 - Tarea 5Leidy Camila Contreras GarciaAún no hay calificaciones
- Base de Datos - Semana 2Documento7 páginasBase de Datos - Semana 2Eduardo Carlos Peña GonzalezAún no hay calificaciones
- Área 3Documento7 páginasÁrea 3Julieth IguadAún no hay calificaciones
- Ensayo Sobre Microsoft Word PDFDocumento3 páginasEnsayo Sobre Microsoft Word PDFVERONICA MARIA AVENDAÑO CARMONA0% (1)
- Convocatorias Manual ADocumento15 páginasConvocatorias Manual AcristodavidAún no hay calificaciones
- Fase 2 - Realizar Diagnóstico de Necesidades de Aprendizaje - 1018458060 v1.0Documento19 páginasFase 2 - Realizar Diagnóstico de Necesidades de Aprendizaje - 1018458060 v1.0Juan Sebastián Cubillos GonzalezAún no hay calificaciones
- PLAN DE ESTUDIOS - MecatronicaDocumento2 páginasPLAN DE ESTUDIOS - MecatronicaLuis Angel Sanchez AguilarAún no hay calificaciones
- Aplicación WEB María y Mitzila BarríaDocumento151 páginasAplicación WEB María y Mitzila BarríaDelvis Joel CruzAún no hay calificaciones
- Manual de Operación Del Torno CNCDocumento6 páginasManual de Operación Del Torno CNCJHON FRANCO TITO TORREJONAún no hay calificaciones
- Actividades Tema 2Documento3 páginasActividades Tema 2Roxana Janneth MoralesAún no hay calificaciones
- ITS Cobas b121Documento13 páginasITS Cobas b121marcelo BRAún no hay calificaciones
- Instructivo Plataforma Taxi SeguroDocumento8 páginasInstructivo Plataforma Taxi SeguroCristian Giovanny Nieto GutierrezAún no hay calificaciones
- Trabajo Manuales de Normas y Procedimientos Sistemas de Procedimiento e Informacion GerencialDocumento11 páginasTrabajo Manuales de Normas y Procedimientos Sistemas de Procedimiento e Informacion GerencialLiss VegasAún no hay calificaciones
- 4 Procesamieno de Señales Digitales PDFDocumento60 páginas4 Procesamieno de Señales Digitales PDFCarlos PedrazaAún no hay calificaciones
- Cuadro SQA-NHDocumento4 páginasCuadro SQA-NHVivi SanchezAún no hay calificaciones
- 7.2 Etg Tic H.chala 21-08-2016 OkDocumento99 páginas7.2 Etg Tic H.chala 21-08-2016 OkjimvelbAún no hay calificaciones
- TALLER LENGUAJE 22 Al 26 FEB 21 SEMANA 3Documento17 páginasTALLER LENGUAJE 22 Al 26 FEB 21 SEMANA 3samuel portilloAún no hay calificaciones
- Manual General de La CompañiaDocumento44 páginasManual General de La CompañiaCASA DE SOFTWARE TECNO SASAún no hay calificaciones
- Anexo 2 Formato Entrega Tarea2Documento8 páginasAnexo 2 Formato Entrega Tarea2ivanherranandradeAún no hay calificaciones
- EC2 T3 Munoz CapillaDocumento21 páginasEC2 T3 Munoz Capillaclaramc921Aún no hay calificaciones
- 2020 03 28 10 18 16 Esanchez2342 A Solicitud de Empleo EST PDFDocumento2 páginas2020 03 28 10 18 16 Esanchez2342 A Solicitud de Empleo EST PDFDylan ChagalaAún no hay calificaciones
- Excel avanzadoDocumento15 páginasExcel avanzadoCesar HuamaniAún no hay calificaciones
- Instalación herramientas redesDocumento27 páginasInstalación herramientas redesYomin KatuongoAún no hay calificaciones
- Aplicar Los Conceptos de Una Base de Datos Según Requerimientos de Una EmpresaDocumento4 páginasAplicar Los Conceptos de Una Base de Datos Según Requerimientos de Una Empresajuliana0386Aún no hay calificaciones
- Visual Studio NETDocumento12 páginasVisual Studio NETzutosuuAún no hay calificaciones