También podría gustarte
- Amortiguamiento de ColoumbDocumento10 páginasAmortiguamiento de ColoumbMichu OviedoAún no hay calificaciones
- Modelo de FriccionDocumento10 páginasModelo de Friccioncrazy_bartAún no hay calificaciones
- Método Trabajo de La Deformación ElásticaDocumento9 páginasMétodo Trabajo de La Deformación ElásticaBorgues QchAún no hay calificaciones
- Vibraciones MecánicasDocumento36 páginasVibraciones MecánicasCarlos EduardoAún no hay calificaciones
- Vibraciones AmortiguadasDocumento31 páginasVibraciones AmortiguadasMaybrid Pecho. AAún no hay calificaciones
- Vibraciones en VigasDocumento147 páginasVibraciones en VigasJosue A. Pazmiño LombardoAún no hay calificaciones
- Informe N°2Documento8 páginasInforme N°2juan.fernando.delgadoAún no hay calificaciones
- G06 P5 B2Documento8 páginasG06 P5 B2Snøw vøAún no hay calificaciones
- Movimiento Armónico ForzadoDocumento10 páginasMovimiento Armónico ForzadoLoRe VidalAún no hay calificaciones
- Vigas ContinuasDocumento9 páginasVigas Continuasdenyab2100% (1)
- Amortiguamiento HisteréticoDocumento26 páginasAmortiguamiento HisteréticoJose Gregorio Farias BrugésAún no hay calificaciones
- Apuntes Estab IIDocumento20 páginasApuntes Estab IIdamianAún no hay calificaciones
- Clase 2. Vibración Libre - ModificadoDocumento23 páginasClase 2. Vibración Libre - ModificadoDIEGO CALDERÓNAún no hay calificaciones
- Clase 2. Vibración Libre - ModificadoDocumento23 páginasClase 2. Vibración Libre - Modificadojuan carlos jimenezAún no hay calificaciones
- Tarea 200Documento14 páginasTarea 200YelsonD.FloresAún no hay calificaciones
- Trabajo de Resonancia y AmortiguadoresDocumento11 páginasTrabajo de Resonancia y AmortiguadoresFranzuat Carpio PazAún no hay calificaciones
- Amortiguamiento de Coulomb e HistéricoDocumento12 páginasAmortiguamiento de Coulomb e HistéricoErick SolanoAún no hay calificaciones
- Universidad de Guayaquil Matematicas IIIDocumento16 páginasUniversidad de Guayaquil Matematicas IIIJoel Leo Ac DcAún no hay calificaciones
- Teoria de FallaDocumento10 páginasTeoria de FallaEgar MtzAún no hay calificaciones
- Aplicaciones de Ecuaciones Diferenciales en La Ingeniria CivilDocumento9 páginasAplicaciones de Ecuaciones Diferenciales en La Ingeniria CivilJorge Roly Chavez SequeirosAún no hay calificaciones
- Taller 05Documento7 páginasTaller 05Stanly OlivaresAún no hay calificaciones
- Informe SDocumento25 páginasInforme SChris EspinozaAún no hay calificaciones
- FlexionDocumento26 páginasFlexionRamiro BritoAún no hay calificaciones
- 02 Guia Ensayos Mecánicos (Flexión, Tensión)Documento11 páginas02 Guia Ensayos Mecánicos (Flexión, Tensión)pepaAún no hay calificaciones
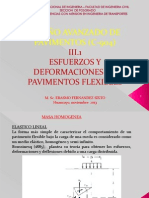
- III.1 Esfuerzos y Deformaciones en Pavimentos FlexiblesDocumento36 páginasIII.1 Esfuerzos y Deformaciones en Pavimentos FlexiblesHector Salcedo100% (2)
- Modelo ViscoplasticoDocumento13 páginasModelo ViscoplasticoJuan AcostaAún no hay calificaciones
- Ensayo de Traccion 07 08 PDFDocumento10 páginasEnsayo de Traccion 07 08 PDFBaltazar BernardoAún no hay calificaciones
- YoyoDocumento8 páginasYoyoOscar Alfonso Sandoval SaenzAún no hay calificaciones
- Acero PropiedadesDocumento11 páginasAcero PropiedadesAlvaroAún no hay calificaciones
- EDO Movimiento VibratorioDocumento15 páginasEDO Movimiento VibratorioboniekAún no hay calificaciones
- Física I, Semana 12Documento11 páginasFísica I, Semana 12Mario MeroAún no hay calificaciones
- 1.3.7 Momento Colaborativo Actividad DosDocumento2 páginas1.3.7 Momento Colaborativo Actividad Doscarlos robayoAún no hay calificaciones
- Fundamentos de VibracionesDocumento17 páginasFundamentos de VibracionesMoisés Vázquez ToledoAún no hay calificaciones
- Grados de LibertadDocumento9 páginasGrados de LibertadjhmnaAún no hay calificaciones
- LatexDocumento8 páginasLatexKevin KmikzeAún no hay calificaciones
- Actividad Fundamental 2 INGMATDocumento27 páginasActividad Fundamental 2 INGMATPedro SifuentesAún no hay calificaciones
- Vibraciones Libres Con Amortiguamiento ViscosoDocumento11 páginasVibraciones Libres Con Amortiguamiento ViscosoCairo Ulloa100% (1)
- P 6Documento9 páginasP 6Lu LabraAún no hay calificaciones
- UiuiuiuDocumento20 páginasUiuiuiuMarco Cisneros,Yheferson Maza,Diego Díaz,Jairo Giohayro,David Samamé,Gino Cuadros,Ricardo TrinidadAún no hay calificaciones
- Amortiguamiento, Viscoso, Seco, Estructural.Documento39 páginasAmortiguamiento, Viscoso, Seco, Estructural.Héctor Ramírez SernaAún no hay calificaciones
- Cinematica Cuerpo Rigido U3 - 1 MVD JCSP Set-2022Documento66 páginasCinematica Cuerpo Rigido U3 - 1 MVD JCSP Set-2022RAJIV AUGUSTO QUISPE CCAHUANAAún no hay calificaciones
- Tarea2 VibracionesMecanicasDocumento14 páginasTarea2 VibracionesMecanicasPepe SanchezAún no hay calificaciones
- Vibraciones ForzadasDocumento13 páginasVibraciones ForzadasOmar Vega FernándezAún no hay calificaciones
- Medición de Propiedades DinámicasDocumento11 páginasMedición de Propiedades DinámicasAlvaro HoyosAún no hay calificaciones
- Ley de HookeDocumento13 páginasLey de HookeDIEGO DUARTE MONTANAAún no hay calificaciones
- 5MM2 Rocha Balderas Edson Javier Tarea 1Documento3 páginas5MM2 Rocha Balderas Edson Javier Tarea 1Edson Javier Rocha BalderasAún no hay calificaciones
- Marco Teorico 1Documento3 páginasMarco Teorico 1Jacqueline Aramburu RicraAún no hay calificaciones
- ObjetivosDocumento8 páginasObjetivosLGEND LGENDAún no hay calificaciones
- Movimiento Oscilatorio 02Documento33 páginasMovimiento Oscilatorio 02Robert Soberón EspinozaAún no hay calificaciones
- Colisiones - Fisica 1Documento10 páginasColisiones - Fisica 1Allisson SanchezAún no hay calificaciones
- MSOL Cap 7 v2019Documento10 páginasMSOL Cap 7 v2019javier.ledesma.gaviaAún no hay calificaciones
- Ejercicios Propuestos Dinámica EstructuralDocumento1 páginaEjercicios Propuestos Dinámica Estructuralpike86Aún no hay calificaciones
- Lab 3 Movimiento Armonico AmortiguadoDocumento8 páginasLab 3 Movimiento Armonico AmortiguadojhoanaAún no hay calificaciones
- Cuerpo ElásticoDocumento7 páginasCuerpo ElásticoNancy Castillo Ravelo100% (1)
- Informe 1 Fisica 2 - UNMSM - Con Simulador VirtualDocumento7 páginasInforme 1 Fisica 2 - UNMSM - Con Simulador VirtualMirko RodrigoAún no hay calificaciones
- Informe Proyecto 3Documento24 páginasInforme Proyecto 3miguelmolaAún no hay calificaciones
- Laboratorio de Vibraciones MecanicasDocumento9 páginasLaboratorio de Vibraciones Mecanicasnikolle12Aún no hay calificaciones
- Trabajo Encargado EcuacionesDocumento16 páginasTrabajo Encargado EcuacionesDeysi M. MontoyaAún no hay calificaciones
- Ejercicios sobre elasticidad y resistencia de materialesDe EverandEjercicios sobre elasticidad y resistencia de materialesAún no hay calificaciones
- Conexión en Estrella de Un Alternador - Análisis y Diagrama VectorialDocumento1 páginaConexión en Estrella de Un Alternador - Análisis y Diagrama VectorialAngel MarianoAún no hay calificaciones
- Fuentes ConmutadasDocumento14 páginasFuentes ConmutadasAngel MarianoAún no hay calificaciones
- Optimización Multi-ObjetivoDocumento291 páginasOptimización Multi-ObjetivoAngel MarianoAún no hay calificaciones
- Ec00002e37es 2012 ScreenDocumento88 páginasEc00002e37es 2012 ScreenAngel MarianoAún no hay calificaciones
- PDF 042 PDFDocumento3 páginasPDF 042 PDFAngel MarianoAún no hay calificaciones
- La Integral de LebesgueDocumento23 páginasLa Integral de LebesgueAngel MarianoAún no hay calificaciones
- MODELADO EstabilidadDocumento5 páginasMODELADO EstabilidadAngel MarianoAún no hay calificaciones
- FDC 110KDocumento2 páginasFDC 110KXavier VillacisAún no hay calificaciones
- Historia de La RoboticaDocumento7 páginasHistoria de La RoboticaLeonardo RomoAún no hay calificaciones
- Practica Magnitudes y Conversion de UnidadesDocumento2 páginasPractica Magnitudes y Conversion de UnidadesShaiel GómezAún no hay calificaciones
- Apuntes Electricidad I Ley-De-Coulomb ResueltosDocumento3 páginasApuntes Electricidad I Ley-De-Coulomb Resueltosfranco jorqueraAún no hay calificaciones
- PSP - Actividad - 6.1 - Usos de Process y ProcessBuilderDocumento2 páginasPSP - Actividad - 6.1 - Usos de Process y ProcessBuilderoscardaxAún no hay calificaciones
- Leyes de MendelDocumento28 páginasLeyes de MendelAngie LeyaniAún no hay calificaciones
- Guia de Laboratorio CementosDocumento14 páginasGuia de Laboratorio CementosCamila Nelida BernabeAún no hay calificaciones
- Técnicas e Instrumentos de Recojo de InformaciónDocumento7 páginasTécnicas e Instrumentos de Recojo de InformaciónMerlyAún no hay calificaciones
- Practico 3. Vectores 2014Documento5 páginasPractico 3. Vectores 2014Fabian PazAún no hay calificaciones
- Unidad 3Documento2 páginasUnidad 3Iris VidalAún no hay calificaciones
- Testimonio Moral y EpistemologíaDocumento21 páginasTestimonio Moral y EpistemologíaFilosofia FuacAún no hay calificaciones
- Trabajo GrupalDocumento17 páginasTrabajo GrupalMARRRAún no hay calificaciones
- Articulo Final - Grupo 7Documento12 páginasArticulo Final - Grupo 7Raul Washington Mescco PumaAún no hay calificaciones
- Expo Termo SEGUUNDA LEY DE TERMODINAMICADocumento46 páginasExpo Termo SEGUUNDA LEY DE TERMODINAMICAIvan Rondinel BulejeAún no hay calificaciones
- Rebobinado de Motores TrifaasicosDocumento4 páginasRebobinado de Motores TrifaasicosRodrigo Mamani ApazaAún no hay calificaciones
- Ejercicio N° 25 Del Primer PracticoDocumento9 páginasEjercicio N° 25 Del Primer Practicofernandez_andreaAún no hay calificaciones
- Testigo de La Verdad: El Mensaje de JesúsDocumento163 páginasTestigo de La Verdad: El Mensaje de JesúsdfvedvwrAún no hay calificaciones
- BMy Esin RQDocumento52 páginasBMy Esin RQGranada Martínez MaribelAún no hay calificaciones
- Circuitos Electricos U1 PDFDocumento29 páginasCircuitos Electricos U1 PDFCarlos BravoAún no hay calificaciones
- Teorema de PitágorasDocumento2 páginasTeorema de PitágorasAnonymous zsSgnZj2Aún no hay calificaciones
- Tarea 1Documento1 páginaTarea 1Raul Ledezma ArévaloAún no hay calificaciones
- Manual OpenTSAv1.0Documento12 páginasManual OpenTSAv1.0yascencaoAún no hay calificaciones
- Guia para La Presentación de Proyectos de InvestigaciónDocumento10 páginasGuia para La Presentación de Proyectos de InvestigaciónMilton Carmelo Montero SánchezAún no hay calificaciones
- Hid Ro Carbu Rose Structur A GeneralDocumento10 páginasHid Ro Carbu Rose Structur A GeneralRafael UzcáteguiAún no hay calificaciones
- Pci Del Area de Matematica - DesagregadoDocumento8 páginasPci Del Area de Matematica - Desagregadopablo_franciscomAún no hay calificaciones
- Elementos Químicos y Sus Propiedades PeriódicasDocumento100 páginasElementos Químicos y Sus Propiedades PeriódicasFernando Bellandi RulloAún no hay calificaciones
- Estructura y Estereoquímica de Los AlcanosDocumento6 páginasEstructura y Estereoquímica de Los AlcanosJose UvaAún no hay calificaciones
- LogicaDePredicados Libro LógicaDocumento52 páginasLogicaDePredicados Libro LógicaLorenaAún no hay calificaciones
- Preset - MVCSDocumento4 páginasPreset - MVCSRoxana CusacaniAún no hay calificaciones
- Fluidos PDFDocumento3 páginasFluidos PDFXimena RiveroAún no hay calificaciones