También podría gustarte
- Robótica educativa: aprendizaje a través de la construcción y programación de robotsDocumento60 páginasRobótica educativa: aprendizaje a través de la construcción y programación de robotsErnesto Vladimir Valdez100% (4)
- NieR-Automata-Short-Story-Long Tomo 2 PDFDocumento344 páginasNieR-Automata-Short-Story-Long Tomo 2 PDFblanquita77100% (1)
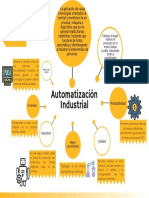
- Automatización Industrial Mapa MentalDocumento1 páginaAutomatización Industrial Mapa MentalALPIZAR GARDU�O GERARDO INGENIER�A EL�CTRICAAún no hay calificaciones
- Trabajo Escrito AndroidesDocumento5 páginasTrabajo Escrito AndroidesjesusAún no hay calificaciones
- Grupo#4 ANDROIDESDocumento2 páginasGrupo#4 ANDROIDESMinjee ParkAún no hay calificaciones
- Que Es Un RobotDocumento24 páginasQue Es Un RobotJohan427Aún no hay calificaciones
- Gerzain Resendiz Torres: Reporte Promer ParcialDocumento19 páginasGerzain Resendiz Torres: Reporte Promer ParcialGERZAIN RESENDIZ TORRESAún no hay calificaciones
- Que Es Un AndroideDocumento16 páginasQue Es Un AndroideCecilia TrujilloAún no hay calificaciones
- Taller de RoboticaDocumento10 páginasTaller de RoboticaMelany LozanoAún no hay calificaciones
- Clase de Arduino UnoDocumento66 páginasClase de Arduino Unosilvia cortezAún no hay calificaciones
- Robotica ExposicionDocumento17 páginasRobotica ExposicionliderAún no hay calificaciones
- Que Se Considera RobotDocumento1 páginaQue Se Considera RobotDario Tiberio Pinzon AlvarezAún no hay calificaciones
- El Robot Como Un Sistema MecatrónicoDocumento12 páginasEl Robot Como Un Sistema MecatrónicoMario IslasAún no hay calificaciones
- Tipos de Configuraciones de RobotsDocumento10 páginasTipos de Configuraciones de RobotsJuan Pablo RodríguezAún no hay calificaciones
- Robótica y Aplicaciones La MineríaDocumento8 páginasRobótica y Aplicaciones La MineríaJesús DíazAún no hay calificaciones
- RobotsDocumento19 páginasRobotsangiedahianaespinosaAún no hay calificaciones
- Robótica: historia, tipos y aplicaciones enDocumento18 páginasRobótica: historia, tipos y aplicaciones enRebecca MendozaAún no hay calificaciones
- Mecanismo RoboticoDocumento9 páginasMecanismo RoboticoclintonAún no hay calificaciones
- Mateo Exposicion RoboticaDocumento13 páginasMateo Exposicion Roboticaaldio fuentes silvaAún no hay calificaciones
- Introducción y Marco TeoricoDocumento7 páginasIntroducción y Marco TeoricoKewin LlboAún no hay calificaciones
- Unidad III RobotsDocumento29 páginasUnidad III RobotsALe RiveraAún no hay calificaciones
- Cómo Funciona Un RobotDocumento3 páginasCómo Funciona Un RobotDaniia Flores100% (1)
- Definiciones Robótica IndustrialDocumento32 páginasDefiniciones Robótica IndustrialAngelBNAún no hay calificaciones
- Los Robots Humanoides ALEJADocumento7 páginasLos Robots Humanoides ALEJAlos 4 reveldesAún no hay calificaciones
- RoboticaDocumento15 páginasRoboticaKathe Samueza KysAún no hay calificaciones
- TiposRobotsDocumento3 páginasTiposRobotsAlberto TorresAún no hay calificaciones
- La Historia de Los RobotsDocumento4 páginasLa Historia de Los RobotsEduardo Lopez100% (1)
- ROBOTICADocumento4 páginasROBOTICAvictorAún no hay calificaciones
- Historia y evolución de los androidesDocumento12 páginasHistoria y evolución de los androidesvhmaturaAún no hay calificaciones
- ROBOTICADocumento2 páginasROBOTICAElizabeth AndreaAún no hay calificaciones
- Actividad 14Documento2 páginasActividad 14ANYI GABRIELAún no hay calificaciones
- Robotica ExposicionDocumento27 páginasRobotica ExposicionYahaira RodriguezAún no hay calificaciones
- Modulo 1 Titulo 1 Robotica 1Documento7 páginasModulo 1 Titulo 1 Robotica 1angelica joannaAún no hay calificaciones
- Tipos y Características de Los RobotsDocumento5 páginasTipos y Características de Los RobotsRoberto HernandezAún no hay calificaciones
- Yo RobotDocumento15 páginasYo RobotElizabeth HernándezAún no hay calificaciones
- Fundamentos de RoboticaDocumento17 páginasFundamentos de RoboticaEstebanDuque100% (1)
- Definición y Clasificación de Los RobotsDocumento9 páginasDefinición y Clasificación de Los RobotsPablo MendozaAún no hay calificaciones
- Introduccion Robotica Primero y SeguDocumento7 páginasIntroduccion Robotica Primero y SeguPaula TaboadaAún no hay calificaciones
- Evolucion de La RoboticaDocumento7 páginasEvolucion de La RoboticaCinthya JiménezAún no hay calificaciones
- Trabajo Final 4BDocumento5 páginasTrabajo Final 4BFede SiemenAún no hay calificaciones
- 4.introducción Al CursoDocumento16 páginas4.introducción Al CursobecyAún no hay calificaciones
- Robotica DanielDocumento12 páginasRobotica DanielDaniel LugoAún no hay calificaciones
- robotica y robotsDocumento3 páginasrobotica y robotswebavatarAún no hay calificaciones
- Los Robots 903Documento4 páginasLos Robots 903DIANA JINNETH TRIANA LOPEZAún no hay calificaciones
- Los Androides Son Robots Que Se Parecen y Actúan Como Seres HumanosDocumento2 páginasLos Androides Son Robots Que Se Parecen y Actúan Como Seres HumanosDerkis MarcanoAún no hay calificaciones
- Answers RoboticaDocumento4 páginasAnswers RoboticaAnonymous IoreTDh7Aún no hay calificaciones
- Historia Del RobotDocumento67 páginasHistoria Del RobotEdmundo R. NeriaAún no hay calificaciones
- ROBOTICA BASICA PDF 2Documento11 páginasROBOTICA BASICA PDF 2nelson rodriguez bretonAún no hay calificaciones
- La RobóticaDocumento34 páginasLa RobóticaLucía VecinoAún no hay calificaciones
- Fundamentos de La RobóticaDocumento50 páginasFundamentos de La RobóticaEdgar ReynaAún no hay calificaciones
- Robótica: La evolución de los robots a través del tiempoDocumento14 páginasRobótica: La evolución de los robots a través del tiempoAna FernandezAún no hay calificaciones
- Cap.3 Fundamentos de RobóticaDocumento12 páginasCap.3 Fundamentos de RobóticaJaime Monroy HerreraAún no hay calificaciones
- Tic Iii RobóticaDocumento12 páginasTic Iii RobóticaJosseline Garcia BlancoAún no hay calificaciones
- www_canva Corazón EspinadoDocumento1 páginawww_canva Corazón Espinadonaomi21girlAún no hay calificaciones
- Tarea1.Julian - Sanchez.DeSantiago - Robotica Patricio - ZamudioDocumento6 páginasTarea1.Julian - Sanchez.DeSantiago - Robotica Patricio - ZamudioJulián SánchezAún no hay calificaciones
- Conceptos Basicos de RoboticaDocumento30 páginasConceptos Basicos de Roboticapedrocarvil0% (2)
- Robots No IndustrialesDocumento2 páginasRobots No IndustrialesGildardo Villalobos MoralesAún no hay calificaciones
- 4.1 - Conceptos Básicos.Documento52 páginas4.1 - Conceptos Básicos.JGuilermo Espinosa100% (1)
- 1.7 Tipos y Características de RobotsDocumento50 páginas1.7 Tipos y Características de RobotsalanAún no hay calificaciones
- Robotic ADocumento11 páginasRobotic AKatheryn Gissel Pérez PérezAún no hay calificaciones
- Diapositivas Robotica MovilDocumento20 páginasDiapositivas Robotica MovilcarlosdiazovalleAún no hay calificaciones
- Práctica 2 Puente Rectificador 4 DiodosDocumento1 páginaPráctica 2 Puente Rectificador 4 DiodosDaniel Alberto Almanza TorresAún no hay calificaciones
- Tipos de MotoresDocumento8 páginasTipos de MotoresDaniel Alberto Almanza TorresAún no hay calificaciones
- Utilización de Herramientas y Equipos en El Servicio A Sistemas Del Motor A Diesel.Documento2 páginasUtilización de Herramientas y Equipos en El Servicio A Sistemas Del Motor A Diesel.Daniel Alberto Almanza TorresAún no hay calificaciones
- Vehiculos HibridosDocumento8 páginasVehiculos HibridosDaniel Alberto Almanza TorresAún no hay calificaciones
- Trabajo de KikeDocumento10 páginasTrabajo de KikeDaniel Alberto Almanza TorresAún no hay calificaciones
- La Suspension Neumatica ControladaDocumento10 páginasLa Suspension Neumatica ControladaDaniel Alberto Almanza TorresAún no hay calificaciones
- Terezo 20 NoviembreDocumento11 páginasTerezo 20 NoviembreDaniel Alberto Almanza TorresAún no hay calificaciones
- Ejecución Del Servicio A Sistemas de La Suspensión HidroneumáticaDocumento2 páginasEjecución Del Servicio A Sistemas de La Suspensión HidroneumáticaDaniel Alberto Almanza TorresAún no hay calificaciones
- Detección de Fallas Del Sistema de Suspensión de AmortiguaciónDocumento2 páginasDetección de Fallas Del Sistema de Suspensión de AmortiguaciónDaniel Alberto Almanza TorresAún no hay calificaciones
- Detección de Fallas de Sistemas de Inyección de Combustible.Documento5 páginasDetección de Fallas de Sistemas de Inyección de Combustible.Daniel Alberto Almanza TorresAún no hay calificaciones
- Ejecución de Proceso de ReparaciónDocumento1 páginaEjecución de Proceso de ReparaciónDaniel Alberto Almanza TorresAún no hay calificaciones
- Almanza Torres Daniel Alberto Saber Unidad2Documento20 páginasAlmanza Torres Daniel Alberto Saber Unidad2Daniel Alberto Almanza TorresAún no hay calificaciones
- Almanza Torres Daniel Alberto Saber Unidad04Documento10 páginasAlmanza Torres Daniel Alberto Saber Unidad04Daniel Alberto Almanza TorresAún no hay calificaciones
- Almanza Torres Daniel Alberto Saber Unidad3Documento25 páginasAlmanza Torres Daniel Alberto Saber Unidad3Daniel Alberto Almanza TorresAún no hay calificaciones
- Almanza Torres Daniel Alberto Saber Unidad3Documento19 páginasAlmanza Torres Daniel Alberto Saber Unidad3Daniel Alberto Almanza TorresAún no hay calificaciones
- RobotDocumento5 páginasRobotdiana elizabeth solis rodriguezAún no hay calificaciones
- Como Hacer Un Minisumo ProgramaDocumento25 páginasComo Hacer Un Minisumo ProgramaalupolloAún no hay calificaciones
- Cuadernillo Maker Junior Básico Tomo 1Documento81 páginasCuadernillo Maker Junior Básico Tomo 1jelias100% (1)
- Aplicaciones de Los RobotsDocumento9 páginasAplicaciones de Los RobotsharoldAún no hay calificaciones
- 18 TerrapuertoDocumento38 páginas18 TerrapuertoJorgeWashiHuamanChjutalliAún no hay calificaciones
- Asimov, Isaac - Cuevas de AceroDocumento221 páginasAsimov, Isaac - Cuevas de AceroLiselen RodríguezAún no hay calificaciones
- Robot Soccer CambiosDocumento5 páginasRobot Soccer CambiosDavid ChulcaAún no hay calificaciones
- Preguntas Basicas Ing IndustrialDocumento145 páginasPreguntas Basicas Ing IndustrialRamiro PadillaAún no hay calificaciones
- La Necesidad de Ser CentinelasDocumento6 páginasLa Necesidad de Ser CentinelasAdio TimaAún no hay calificaciones
- Robotica ExposicionDocumento27 páginasRobotica ExposicionYahaira RodriguezAún no hay calificaciones
- Robot Tragamonedas (1)Documento3 páginasRobot Tragamonedas (1)ZeniaAún no hay calificaciones
- Elector Electronica 2003-06Documento78 páginasElector Electronica 2003-06aguadecarabanaAún no hay calificaciones
- FMSOKDocumento133 páginasFMSOKMARIANOAún no hay calificaciones
- Paz Interminable. Haldeman, Joe PDFDocumento371 páginasPaz Interminable. Haldeman, Joe PDFJefeDeUnidadAcadémicaIstpChinchaAún no hay calificaciones
- Clasificacion de Los RobotsDocumento4 páginasClasificacion de Los RobotsAA-IPN80% (5)
- La Ficcion FuturistaDocumento5 páginasLa Ficcion FuturistaEliana SotoAún no hay calificaciones
- Cuestionario de RoboticaDocumento4 páginasCuestionario de RoboticaLuis CamposAún no hay calificaciones
- Informe Final Industria 4.0 Version 1.0 PDFDocumento202 páginasInforme Final Industria 4.0 Version 1.0 PDFRicardo NeiraAún no hay calificaciones
- Hensar Ensamblaje y Control de Un Rostro RobóticoDocumento8 páginasHensar Ensamblaje y Control de Un Rostro RobóticoDavid ChisaguanoAún no hay calificaciones
- Manual Sabre Ticket ManualDocumento3 páginasManual Sabre Ticket Manualandresawn01Aún no hay calificaciones
- 002 Las Estrellas Son de FuegoDocumento366 páginas002 Las Estrellas Son de FuegoJuan Sebastián Quintero GómezAún no hay calificaciones
- Robótica: amenaza u oportunidadDocumento6 páginasRobótica: amenaza u oportunidadLaura Daniela Romero VilloutaAún no hay calificaciones
- MEC5Documento54 páginasMEC5andymercAún no hay calificaciones
- Matem Ticas Acad MicasDocumento1 páginaMatem Ticas Acad MicasTheFlanix太Aún no hay calificaciones
- Diagrama de FlujoDocumento5 páginasDiagrama de FlujoDANNA ISABELLA CORTES BERNALAún no hay calificaciones
- Robotica Industrial TR!Documento6 páginasRobotica Industrial TR!Renzo Lescano ParedesAún no hay calificaciones
- GUIA I-Historia de La RobóticaDocumento21 páginasGUIA I-Historia de La RobóticaJairo MárquezAún no hay calificaciones
- 2012 - Enem UP - Matemática e Linguagens - 17-06 - GabaritadoDocumento44 páginas2012 - Enem UP - Matemática e Linguagens - 17-06 - GabaritadoJosé AndersonAún no hay calificaciones