También podría gustarte
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109De EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Aún no hay calificaciones
- Motores MEGATECDocumento34 páginasMotores MEGATECSG JaimeAún no hay calificaciones
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209De EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Calificación: 5 de 5 estrellas5/5 (2)
- I.E.I - Ccahuana Llacho WillianDocumento6 páginasI.E.I - Ccahuana Llacho WillianWillian CcahuanaAún no hay calificaciones
- Curso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoDe EverandCurso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoAún no hay calificaciones
- Servomotores G6Documento35 páginasServomotores G6abdieltarqui7Aún no hay calificaciones
- Montaje y mantenimiento de transformadores. ELEE0109De EverandMontaje y mantenimiento de transformadores. ELEE0109Aún no hay calificaciones
- Motor Paso A PasoDocumento21 páginasMotor Paso A PasoStif Flores G.Aún no hay calificaciones
- Informe de Motores y Generadores SincronicosDocumento14 páginasInforme de Motores y Generadores SincronicosLuis ChillaganaAún no hay calificaciones
- PDF Principio de Funcionamiento de Un Motor Electrico - CompressDocumento30 páginasPDF Principio de Funcionamiento de Un Motor Electrico - Compressjacinto ortizAún no hay calificaciones
- Trabajo de PIST, Dispositivos Electromecánicos y Electromagnético.Documento13 páginasTrabajo de PIST, Dispositivos Electromecánicos y Electromagnético.Gerardo A PiñaAún no hay calificaciones
- Presentacion de Motores A Pasos y ServomotoresDocumento13 páginasPresentacion de Motores A Pasos y Servomotoresmarieth ruiz lopezAún no hay calificaciones
- Motor Paso A Paso Pablo Ascencion Hernandez Maquinas ElectricasDocumento8 páginasMotor Paso A Paso Pablo Ascencion Hernandez Maquinas ElectricasAbigail HernandezAún no hay calificaciones
- Maquinas ElectricasDocumento26 páginasMaquinas ElectricasPao VillaAún no hay calificaciones
- Clasificación de Las Maquinas ElectricasDocumento9 páginasClasificación de Las Maquinas ElectricasChristian TumiAún no hay calificaciones
- EXPOSICION1 RoboticaDocumento9 páginasEXPOSICION1 Robotica20130609Aún no hay calificaciones
- Guía MEDocumento8 páginasGuía MENoelia LaraAún no hay calificaciones
- EXPOSICION2 RoboticaDocumento9 páginasEXPOSICION2 Robotica20130609Aún no hay calificaciones
- SERVOMECANISMOSDocumento23 páginasSERVOMECANISMOSOlivia Rubio67% (3)
- Funcionamiento de Motor de CA y CCDocumento18 páginasFuncionamiento de Motor de CA y CCAntonio ReyesAún no hay calificaciones
- Investigación de Motores de C1 MajoDocumento4 páginasInvestigación de Motores de C1 MajoaleAún no hay calificaciones
- Actuadores (Robotica)Documento25 páginasActuadores (Robotica)SamuelMartinez100% (5)
- Electricidad MotoresDocumento14 páginasElectricidad MotoresLuis JaldinAún no hay calificaciones
- Caracteristicas de MotoresDocumento2 páginasCaracteristicas de MotoresJhimmi limbert Quispe pairoAún no hay calificaciones
- Trabajo de Motores y GeneradoresDocumento14 páginasTrabajo de Motores y GeneradoresEvert Angel Samaniego QuispeAún no hay calificaciones
- Control Motores DCDocumento8 páginasControl Motores DCErick DiazAún no hay calificaciones
- Practica 9 Maquinas Sincronas Ime FescDocumento17 páginasPractica 9 Maquinas Sincronas Ime FescDiego RGAún no hay calificaciones
- Funcionamiento de Los Motores Ac y DCDocumento6 páginasFuncionamiento de Los Motores Ac y DCHenry AcostaAún no hay calificaciones
- Principio de Funcionamiento de Un Motor ElectricoDocumento47 páginasPrincipio de Funcionamiento de Un Motor ElectricoPedro Bermon HernandezAún no hay calificaciones
- Consulta 4 - Motor Bruhless y PP - Valencia ADocumento11 páginasConsulta 4 - Motor Bruhless y PP - Valencia AAlexander ValenciaAún no hay calificaciones
- MotoresDocumento17 páginasMotoresAlejandra Nova CabreraAún no hay calificaciones
- 2 - Sistema de Tren de Fuerza de Camion 794ACDocumento42 páginas2 - Sistema de Tren de Fuerza de Camion 794ACMichael Mendigure Pumachara80% (5)
- Motor ElectricoDocumento87 páginasMotor ElectricoAimarAB SkilletAún no hay calificaciones
- Control de Motores PaP UnipolaresDocumento6 páginasControl de Motores PaP UnipolaresbarbyAún no hay calificaciones
- Motores Paso A PasoDocumento18 páginasMotores Paso A PasoAbdel CaballeroAún no hay calificaciones
- Diapositivas de Motores ElectricosDocumento41 páginasDiapositivas de Motores ElectricosWinkel Malanio Perez Segura100% (1)
- Portada FSC IIDocumento10 páginasPortada FSC IIALEXIS ANTONIO OLIVO GUZMANAún no hay calificaciones
- ActuadoresDocumento30 páginasActuadoresmanuel_avalos_21Aún no hay calificaciones
- Semana 1Documento37 páginasSemana 1Iván MartínezAún no hay calificaciones
- Dibujar Los Esquemas de Conexiones de Motores Eléctricos: IntegrantesDocumento21 páginasDibujar Los Esquemas de Conexiones de Motores Eléctricos: IntegrantesYOSHI AREIKO CHIRINOS CORNELIOAún no hay calificaciones
- Orlando Ramirez-Tipo de MotoresDocumento14 páginasOrlando Ramirez-Tipo de MotoresOrlando RamirezAún no hay calificaciones
- Unidad 2 - Maquinas de Corriente AlternaDocumento23 páginasUnidad 2 - Maquinas de Corriente AlternaDamiano PantaleoAún no hay calificaciones
- MOTORElectricosDocumento11 páginasMOTORElectricosMauricio Dávalos LlaveAún no hay calificaciones
- Motores de Corriente Alterna y Corriente DirectaDocumento3 páginasMotores de Corriente Alterna y Corriente DirectaCarlos JonathanAún no hay calificaciones
- Motores de Corriente Alterna PDFDocumento11 páginasMotores de Corriente Alterna PDFFRANCISCO JAVIER MIRAMONTES ROMANAún no hay calificaciones
- Actuadores Electricos, Neumaticos y HidraulicosDocumento48 páginasActuadores Electricos, Neumaticos y HidraulicosCristianQuispeVenturaAún no hay calificaciones
- Control de Motores PaP BipolaresDocumento5 páginasControl de Motores PaP BipolaresbarbyAún no hay calificaciones
- Curso Basico Motores Electricos Jul-06Documento24 páginasCurso Basico Motores Electricos Jul-06everestoAún no hay calificaciones
- S11 - Actuadores ElectricosDocumento46 páginasS11 - Actuadores Electricosfranklingiovanni100% (1)
- Informe de Motores de Corriente AltenaDocumento33 páginasInforme de Motores de Corriente AltenaMiguel AngelAún no hay calificaciones
- Motores ElectricosDocumento8 páginasMotores Electricosjeanpiere fabianlopezAún no hay calificaciones
- Clasificacion de Motores EléctricosDocumento12 páginasClasificacion de Motores EléctricoshelygiovannyAún no hay calificaciones
- Motor Ese Special EsDocumento3 páginasMotor Ese Special EsJon FiallosAún no hay calificaciones
- Tarea14 - QUISNIA BRYAN - 2029Documento30 páginasTarea14 - QUISNIA BRYAN - 2029Cuenta Netflixilbay2Aún no hay calificaciones
- Motores AcDocumento22 páginasMotores AcJUAN JOSE DIAZ CARRILLOAún no hay calificaciones
- Catalogo FinalDocumento13 páginasCatalogo Finalpokekidpro125Aún no hay calificaciones
- Motores Electricos PresentacionDocumento28 páginasMotores Electricos PresentacionMartínez Arias KarenAún no hay calificaciones
- 1.4. Estudio de La Relación Entre Par y Velocidad.Documento2 páginas1.4. Estudio de La Relación Entre Par y Velocidad.Kevin Perez100% (1)
- Motores EléctricosDocumento23 páginasMotores Eléctricosqwerty112233123Aún no hay calificaciones
- Motores Especiales - InicioDocumento36 páginasMotores Especiales - Inicioramses zamora ortizAún no hay calificaciones
- Proyecto AgroecologicoDocumento3 páginasProyecto AgroecologicoJhoel CcmAún no hay calificaciones
- Estado de La Nación Peruana..Documento2 páginasEstado de La Nación Peruana..Jhoel CcmAún no hay calificaciones
- Linea de Vida de Un RobotDocumento3 páginasLinea de Vida de Un RobotJhoel CcmAún no hay calificaciones
- Resume NDocumento1 páginaResume NJhoel CcmAún no hay calificaciones
- DIFERENCIA ENTRE UN RASPBERRY, ARDUINO Y Uc (JOEL CCALLA MACHACA)Documento3 páginasDIFERENCIA ENTRE UN RASPBERRY, ARDUINO Y Uc (JOEL CCALLA MACHACA)Jhoel CcmAún no hay calificaciones
- PROYECTODocumento5 páginasPROYECTOJhoel CcmAún no hay calificaciones
- Diferencia Entre Motores Pap y Servomotores (Joel Ccalla Machaca)Documento3 páginasDiferencia Entre Motores Pap y Servomotores (Joel Ccalla Machaca)Jhoel CcmAún no hay calificaciones
- Prueba Final de Unidad DidacticaDocumento2 páginasPrueba Final de Unidad DidacticaJhoel CcmAún no hay calificaciones
- Reclamo Eps Ilo111Documento2 páginasReclamo Eps Ilo111Jhoel CcmAún no hay calificaciones
- Examen de Induccion en Seguridad y Salud OcupacionalDocumento2 páginasExamen de Induccion en Seguridad y Salud OcupacionalJuan Mdz84% (122)
- Diferencia Entre Arduino Uno y Mega (Joel Ccalla Machaca)Documento3 páginasDiferencia Entre Arduino Uno y Mega (Joel Ccalla Machaca)Jhoel CcmAún no hay calificaciones
- Pateando LunasDocumento3 páginasPateando LunasJhoel CcmAún no hay calificaciones
- Lista Precios Perú 2018 SEYTU-2 PDFDocumento3 páginasLista Precios Perú 2018 SEYTU-2 PDFelave80% (5)
- Procedimiento Trabajo Conduccion VehiculoDocumento6 páginasProcedimiento Trabajo Conduccion VehiculoCristel Figueroa TAún no hay calificaciones
- Banco de Preguntas y Respuestas SSODocumento3 páginasBanco de Preguntas y Respuestas SSOJhoel CcmAún no hay calificaciones
- Libro 2010Documento10 páginasLibro 2010Jhoel CcmAún no hay calificaciones
- Libro 2010Documento44 páginasLibro 2010Juan Camilo NaranjoAún no hay calificaciones
- Pagina 281Documento2 páginasPagina 281Jhoel CcmAún no hay calificaciones
- 6th Central Pay Commission Salary CalculatorDocumento15 páginas6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Proyecto de TurbomaquinasDocumento10 páginasProyecto de TurbomaquinasJhoel CcmAún no hay calificaciones
- Proyecto de TurbomaquinasDocumento24 páginasProyecto de TurbomaquinasJhoel CcmAún no hay calificaciones
- Libro 2010Documento10 páginasLibro 2010Jhoel CcmAún no hay calificaciones
- Examen Final Maquinas Electricas IIrecuperacionDocumento1 páginaExamen Final Maquinas Electricas IIrecuperacionJhoel CcmAún no hay calificaciones
- Practica de CentralesDocumento1 páginaPractica de CentralesJhoel CcmAún no hay calificaciones
- Ficha de Uso de MP y MB para Segundo de PrimariaDocumento4 páginasFicha de Uso de MP y MB para Segundo de PrimariaJhoel CcmAún no hay calificaciones
- Ficha de Uso de MP y MB para Segundo de PrimariaDocumento4 páginasFicha de Uso de MP y MB para Segundo de PrimariaJhoel Ccm100% (2)
- RODETEDocumento52 páginasRODETEJhoel CcmAún no hay calificaciones
- Libro 2010Documento44 páginasLibro 2010Juan Camilo NaranjoAún no hay calificaciones
- El TransformadorDocumento7 páginasEl TransformadorJhoel CcmAún no hay calificaciones
- Aluled 32Documento2 páginasAluled 32Lorena YepesAún no hay calificaciones
- Practica 4 - Rectificador Trifasico en Estrella Con Filtro Inductivo - Mosfet - ANGEL OVIEDODocumento5 páginasPractica 4 - Rectificador Trifasico en Estrella Con Filtro Inductivo - Mosfet - ANGEL OVIEDOJulio RomeroAún no hay calificaciones
- Docsity Informe Topografico de EclimetroDocumento18 páginasDocsity Informe Topografico de EclimetroJHON RICHARD ALARCON CHUQUIZUTAAún no hay calificaciones
- Manual Linea-2 12 Bomba Turbina Vertical Eje HuecoDocumento20 páginasManual Linea-2 12 Bomba Turbina Vertical Eje Huecohenry jhovany guadalupe cardenasAún no hay calificaciones
- Iluminacion10 BajaDocumento100 páginasIluminacion10 BajaJohan AriasAún no hay calificaciones
- Lookahead ProyectoDocumento7 páginasLookahead ProyectoJohn WaldeAún no hay calificaciones
- I1U3P5Documento2 páginasI1U3P5EDUARDO SALAS TELLEZAún no hay calificaciones
- Unidad III DERECHO DE AUTOR 3 en InternetDocumento65 páginasUnidad III DERECHO DE AUTOR 3 en InternetEze GarcíaAún no hay calificaciones
- Entregable 1 Acta Constitución y Línea Base de Un ProyectoDocumento15 páginasEntregable 1 Acta Constitución y Línea Base de Un ProyectoBrenilda Florez RuizAún no hay calificaciones
- Comprobante de RegistroDocumento2 páginasComprobante de RegistroTolentino Castro Ilian MonserrathAún no hay calificaciones
- Examen Parcial 2do IntentoDocumento7 páginasExamen Parcial 2do IntentoTommy LopezAún no hay calificaciones
- EjerciciosTema1 2 ResueltosDocumento4 páginasEjerciciosTema1 2 ResueltosMayte MerchanAún no hay calificaciones
- Ficha de Estudiante Victor Ala CalleDocumento4 páginasFicha de Estudiante Victor Ala CalleVictor CalleAún no hay calificaciones
- Fundamentos de La Señalización ATMDocumento4 páginasFundamentos de La Señalización ATMRobersy JoselynAún no hay calificaciones
- Examen Final Excel Avanzado 211003 153154Documento2 páginasExamen Final Excel Avanzado 211003 153154Dan AranmunAún no hay calificaciones
- Taller1 Parcial3 Nrc3956Documento3 páginasTaller1 Parcial3 Nrc3956Vänë Lïž100% (1)
- Certificado de Martha InesDocumento2 páginasCertificado de Martha InesAngel Garcia GonzalezAún no hay calificaciones
- Evidencia 5 Estudio de Casos "Situaciones Empresariales"Documento6 páginasEvidencia 5 Estudio de Casos "Situaciones Empresariales"Tareas AgoraAún no hay calificaciones
- Requerimiento Hornos 2021Documento1 páginaRequerimiento Hornos 2021Otoniel SánchezAún no hay calificaciones
- Matriz de ValoracionDocumento1 páginaMatriz de ValoracionSolòrzano Acuña MiguelAún no hay calificaciones
- Trabajo IO II. 2 CorteDocumento17 páginasTrabajo IO II. 2 CorteEstefania Salazar ArenasAún no hay calificaciones
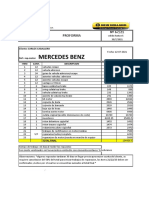
- Mercedes Benz: Proforma #67/21Documento2 páginasMercedes Benz: Proforma #67/21Milder PadillaAún no hay calificaciones
- Sebastian Londoño Requerimiento Eventos 2021Documento6 páginasSebastian Londoño Requerimiento Eventos 2021diego armando rojas gomezAún no hay calificaciones
- Propósito:: Sesión de Aprendizaje N ° 1Documento6 páginasPropósito:: Sesión de Aprendizaje N ° 1Gabriel VelásquezAún no hay calificaciones
- Elaboración de Un Plan de CalidadDocumento27 páginasElaboración de Un Plan de CalidadJohn Montenegro100% (2)
- 4 IDENTIFICACION POLICIAL 2021 Convertido - 626 - 0Documento13 páginas4 IDENTIFICACION POLICIAL 2021 Convertido - 626 - 0Jeine Vasquez CiezaAún no hay calificaciones
- Diseño de InterfazDocumento33 páginasDiseño de Interfazaaacert12Aún no hay calificaciones
- Clase 6.1Documento38 páginasClase 6.1Lore GarciaAún no hay calificaciones
- Pirámide de La AutomatizaciónDocumento9 páginasPirámide de La AutomatizaciónJuan JoseAún no hay calificaciones
- Ememsa Llaves CVDocumento13 páginasEmemsa Llaves CVRicardo Sergio Tacoma CarbajalAún no hay calificaciones
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- Lógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosDe EverandLógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosCalificación: 3.5 de 5 estrellas3.5/5 (7)
- Excel 2021 y 365 Paso a Paso: Paso a PasoDe EverandExcel 2021 y 365 Paso a Paso: Paso a PasoCalificación: 5 de 5 estrellas5/5 (12)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteCalificación: 1 de 5 estrellas1/5 (1)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónDe EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- LAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.De EverandLAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.Calificación: 4.5 de 5 estrellas4.5/5 (54)
- Design Thinking para principiantes: La innovación como factor para el éxito empresarialDe EverandDesign Thinking para principiantes: La innovación como factor para el éxito empresarialCalificación: 4.5 de 5 estrellas4.5/5 (10)
- Machine Learning y Deep Learning: Usando Python, Scikit y KerasDe EverandMachine Learning y Deep Learning: Usando Python, Scikit y KerasAún no hay calificaciones
- ¿Cómo piensan las máquinas?: Inteligencia artificial para humanosDe Everand¿Cómo piensan las máquinas?: Inteligencia artificial para humanosCalificación: 5 de 5 estrellas5/5 (1)
- EL PLAN DE NEGOCIOS DE UNA FORMA SENCILLA. La guía práctica que ayuda a poner en marcha nuevos proyectos e ideas empresariales.De EverandEL PLAN DE NEGOCIOS DE UNA FORMA SENCILLA. La guía práctica que ayuda a poner en marcha nuevos proyectos e ideas empresariales.Calificación: 4 de 5 estrellas4/5 (20)
- La psicología del trading de una forma sencilla: Cómo aplicar las estrategias psicológicas y las actitudes de los comerciantes ganadores para operar con éxito en línea.De EverandLa psicología del trading de una forma sencilla: Cómo aplicar las estrategias psicológicas y las actitudes de los comerciantes ganadores para operar con éxito en línea.Calificación: 4.5 de 5 estrellas4.5/5 (3)
- Curso básico de Python: La guía para principiantes para una introducción en la programación con PythonDe EverandCurso básico de Python: La guía para principiantes para una introducción en la programación con PythonAún no hay calificaciones
- Todo Sobre Tecnología Blockchain: La Guía Definitiva Para Principiantes Sobre Monederos BlockchainDe EverandTodo Sobre Tecnología Blockchain: La Guía Definitiva Para Principiantes Sobre Monederos BlockchainAún no hay calificaciones
- Inteligencia artificial: Análisis de datos e innovación para principiantesDe EverandInteligencia artificial: Análisis de datos e innovación para principiantesCalificación: 4 de 5 estrellas4/5 (3)
- El método de los elementos finitos: Un enfoque teórico prácticoDe EverandEl método de los elementos finitos: Un enfoque teórico prácticoCalificación: 3 de 5 estrellas3/5 (4)
- Ciberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialDe EverandCiberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialCalificación: 4.5 de 5 estrellas4.5/5 (11)
- El mito de la inteligencia artificial: Por qué las máquinas no pueden pensar como nosotros lo hacemosDe EverandEl mito de la inteligencia artificial: Por qué las máquinas no pueden pensar como nosotros lo hacemosCalificación: 5 de 5 estrellas5/5 (2)
- Manual de prácticas de Ingeniería de Alimentos: Propiedades, operaciones y bioprocesosDe EverandManual de prácticas de Ingeniería de Alimentos: Propiedades, operaciones y bioprocesosAún no hay calificaciones
- Minería de Datos: Guía de Minería de Datos para Principiantes, que Incluye Aplicaciones para Negocios, Técnicas de Minería de Datos, Conceptos y MásDe EverandMinería de Datos: Guía de Minería de Datos para Principiantes, que Incluye Aplicaciones para Negocios, Técnicas de Minería de Datos, Conceptos y MásCalificación: 4.5 de 5 estrellas4.5/5 (4)