También podría gustarte
- Taller Tiro Parabólico-Juan Lopez y Brayan RoaDocumento11 páginasTaller Tiro Parabólico-Juan Lopez y Brayan Roajuan lopez100% (2)
- Cinemática Plana Del Cuerpo RígidoDocumento10 páginasCinemática Plana Del Cuerpo RígidoDavid RamirezAún no hay calificaciones
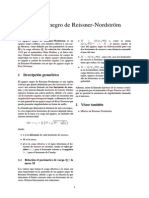
- Agujero Negro de Reissner-NordströmDocumento2 páginasAgujero Negro de Reissner-NordströmArturo Alcides100% (2)
- Segunda Ley de NewtonDocumento16 páginasSegunda Ley de Newtonfranko_com90% (10)
- Movimiento PlanoDocumento18 páginasMovimiento PlanoJose Francisco Valdez BautistaAún no hay calificaciones
- Cinematica Del Cuerpo RigidoDocumento14 páginasCinematica Del Cuerpo RigidoFernanda SolisAún no hay calificaciones
- Resolución EIP N°1 (Rev.01)Documento7 páginasResolución EIP N°1 (Rev.01)delfinagomez2300Aún no hay calificaciones
- T1 Momento RotacionalDocumento20 páginasT1 Momento RotacionalOscar Adrian Astorga AguilarAún no hay calificaciones
- D - 06 - Fuerzas y Movimiento CircularDocumento8 páginasD - 06 - Fuerzas y Movimiento Circularluis vidalAún no hay calificaciones
- Resumen - Cinematica de Cuerpos RigidosDocumento5 páginasResumen - Cinematica de Cuerpos RigidosGenri Mendez DiazAún no hay calificaciones
- Unidad IV - Temas 1 y 2 - Cinematica de Cuerpos RigidosDocumento16 páginasUnidad IV - Temas 1 y 2 - Cinematica de Cuerpos RigidosAlexis Galvan SammpedroAún no hay calificaciones
- Cinemática de Cuerpos Rígidos - Grupo N°5Documento77 páginasCinemática de Cuerpos Rígidos - Grupo N°5Rashell RoseroAún no hay calificaciones
- Examen Ut5 CinematicaDocumento23 páginasExamen Ut5 CinematicaSaul MedranoAún no hay calificaciones
- Capitulo 9 - Luna MisaelDocumento4 páginasCapitulo 9 - Luna MisaelJUAN PABLO DELGADILLO GOCHEAún no hay calificaciones
- Movimiento CurvilineoDocumento6 páginasMovimiento CurvilineoAwdy GarciaAún no hay calificaciones
- Dinamica t1Documento29 páginasDinamica t1Anonymous vFKh6eLAún no hay calificaciones
- Cinematica de Cuerpos RigidosDocumento19 páginasCinematica de Cuerpos Rigidosedgar jarquinAún no hay calificaciones
- Dinamica Del Cuerpo RígidoDocumento8 páginasDinamica Del Cuerpo RígidoJonathan MolinaAún no hay calificaciones
- Cinematica-De-Cuerpos-Rigidos Rafael RuizDocumento18 páginasCinematica-De-Cuerpos-Rigidos Rafael Ruizjucilo80Aún no hay calificaciones
- Movimiento Armónico Simple (Borrador)Documento4 páginasMovimiento Armónico Simple (Borrador)JulianMaidanaAún no hay calificaciones
- S14.s2-Material CINEMATICA INERCIA ROTACIONALDocumento19 páginasS14.s2-Material CINEMATICA INERCIA ROTACIONALAaronAún no hay calificaciones
- Movimiento Armónico SimpleDocumento8 páginasMovimiento Armónico SimpleJulianMaidanaAún no hay calificaciones
- Dinamica de Marco y Kiwi 22222Documento12 páginasDinamica de Marco y Kiwi 22222Josè VargasAún no hay calificaciones
- Relatividad Parte 3Documento11 páginasRelatividad Parte 3Luis MendozaAún no hay calificaciones
- S14.s2 - Cinematica Inercia RotacionalDocumento19 páginasS14.s2 - Cinematica Inercia RotacionalRichard HuayhuaAún no hay calificaciones
- 06 UnidAp 10° p2 F3 FisicaDocumento14 páginas06 UnidAp 10° p2 F3 FisicaMARCO AURELIO SERNAAún no hay calificaciones
- Cinematica de Los Cuerpos RigidosDocumento9 páginasCinematica de Los Cuerpos RigidosTOÑOAún no hay calificaciones
- 16 Traslación y RotaciónDocumento32 páginas16 Traslación y RotaciónVeronica De Santiago LopezAún no hay calificaciones
- Ley de HookeDocumento5 páginasLey de HookeHernan Lázaro PamilaAún no hay calificaciones
- A6 JaplDocumento15 páginasA6 JaplCRISTIAN ORTIZ GOMEZAún no hay calificaciones
- Cinemática de Cuerpos RígidosDocumento13 páginasCinemática de Cuerpos RígidosMonse100% (1)
- A8 JaplDocumento21 páginasA8 JaplCRISTIAN ORTIZ GOMEZAún no hay calificaciones
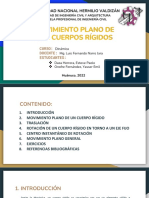
- Movimiento Plano de Los Cuerpos Rígidos: Universidad Nacional Hermilio ValdizánDocumento36 páginasMovimiento Plano de Los Cuerpos Rígidos: Universidad Nacional Hermilio ValdizánDaniela RomeroAún no hay calificaciones
- Hoja de Fórmulas Física 1 Primera ParteDocumento5 páginasHoja de Fórmulas Física 1 Primera Partejhon doeAún no hay calificaciones
- Exposición-Introducción-Cinemática de Cuerpos RígidosDocumento43 páginasExposición-Introducción-Cinemática de Cuerpos RígidosFelixPabloRamirezAún no hay calificaciones
- Unidad 09 - Rotación de Cuerpos RigidosDocumento13 páginasUnidad 09 - Rotación de Cuerpos RigidosLucas GamboaAún no hay calificaciones
- Desplazamientos PequeñosDocumento8 páginasDesplazamientos PequeñosDiana ValladaresAún no hay calificaciones
- Resume N Mecanic ADocumento9 páginasResume N Mecanic ADiego Tafur LópezAún no hay calificaciones
- DinamicaDocumento10 páginasDinamicaalvaro alexis muñoz cidAún no hay calificaciones
- 20 Investigación U3 4M1 OrtizlunaDocumento36 páginas20 Investigación U3 4M1 OrtizlunaJuan Carlos LunaAún no hay calificaciones
- Cuerpo RigidoDocumento14 páginasCuerpo RigidoJuan Cruz GonzalezAún no hay calificaciones
- Dinamica Unidad 2Documento13 páginasDinamica Unidad 2Ricardo SotoAún no hay calificaciones
- Apuntes de Dinámica Del Cuerpo RígidoDocumento34 páginasApuntes de Dinámica Del Cuerpo RígidoJulián SánchezAún no hay calificaciones
- Dinamica Unidad 2Documento20 páginasDinamica Unidad 2Aldo Jair Cardenas GonzalezAún no hay calificaciones
- Cinemática de Un Cuerpo RígidoDocumento11 páginasCinemática de Un Cuerpo Rígidodiego mendozaAún no hay calificaciones
- Resumen FisicaDocumento44 páginasResumen FisicaMalena UrraAún no hay calificaciones
- El Oscilador ArmónicoDocumento11 páginasEl Oscilador Armónicokatnia.bel.vazzAún no hay calificaciones
- Velocidad RelativaDocumento7 páginasVelocidad RelativaCesar CGAún no hay calificaciones
- Rotación de Cuerpos RígidosDocumento34 páginasRotación de Cuerpos RígidosEDILSON JOSAFAT RODRIGUEZ DELGADILLOAún no hay calificaciones
- Tema 2Documento38 páginasTema 2MrPezetaAún no hay calificaciones
- Física I - Semana 03 - Leyes de Newton y RozamientoDocumento37 páginasFísica I - Semana 03 - Leyes de Newton y RozamientoGabriela CAún no hay calificaciones
- Rotación de Sólido RígidoDocumento6 páginasRotación de Sólido RígidojaminsonlimaAún no hay calificaciones
- Momento AngularDocumento19 páginasMomento AngularJohan Gregorio BautistaAún no hay calificaciones
- Momento Angular-Dinamica-Estatica y Energia Del CRDocumento21 páginasMomento Angular-Dinamica-Estatica y Energia Del CRLeonardo H.AAún no hay calificaciones
- Unidad Ii Dinasmica TerminadoDocumento26 páginasUnidad Ii Dinasmica TerminadoSantibañez CruzAún no hay calificaciones
- 05 RotaciónDocumento29 páginas05 RotaciónDaniel Florez TellezAún no hay calificaciones
- Labo 4 Ver.04 FinalDocumento17 páginasLabo 4 Ver.04 FinalLuis HuarhuaAún no hay calificaciones
- FisicaDocumento17 páginasFisicalopezAún no hay calificaciones
- S14 S2-MaterialDocumento19 páginasS14 S2-MaterialYaneth QuirozAún no hay calificaciones
- Torque y Cuerpo RigidosDocumento45 páginasTorque y Cuerpo Rigidosraul pintoAún no hay calificaciones
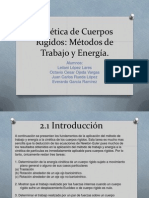
- Cinética de Cuerpos RígidosDocumento13 páginasCinética de Cuerpos RígidosEver Garcia RamirezAún no hay calificaciones
- Gráficos de torno: Explorando la manipulación visual en gráficos de torno a través de visión por computadoraDe EverandGráficos de torno: Explorando la manipulación visual en gráficos de torno a través de visión por computadoraAún no hay calificaciones
- Formato Cursograma AnaliticoDocumento1 páginaFormato Cursograma AnaliticoMariana ObregonAún no hay calificaciones
- Taller Movimiento RelativoDocumento3 páginasTaller Movimiento RelativoJûân LôpëzAún no hay calificaciones
- Formato - Ingreso y Cumplimiento Protocolo - JUAN SEBASTIAN LOPEZ SANCHEZDocumento1 páginaFormato - Ingreso y Cumplimiento Protocolo - JUAN SEBASTIAN LOPEZ SANCHEZjuan lopezAún no hay calificaciones
- Una Bicicleta Rueda A Lo Largo de Una Carretera RectaDocumento2 páginasUna Bicicleta Rueda A Lo Largo de Una Carretera Rectajuan lopez100% (1)
- Formato Cursograma AnaliticoDocumento1 páginaFormato Cursograma Analiticojuan lopezAún no hay calificaciones
- Mapa Conceptual Cinetica de Cuerpo RigidoDocumento1 páginaMapa Conceptual Cinetica de Cuerpo Rigidojuan lopezAún no hay calificaciones
- 04 Pract Clas A Cinematica Plana Del Cuerpo Rigido Parte 1 PDFDocumento1 página04 Pract Clas A Cinematica Plana Del Cuerpo Rigido Parte 1 PDFjuan lopezAún no hay calificaciones
- Mapa Conceptual Cinetica de Cuerpo RigidoDocumento4 páginasMapa Conceptual Cinetica de Cuerpo Rigidojuan lopezAún no hay calificaciones
- Taller Tiro ParabólicoDocumento11 páginasTaller Tiro Parabólicojuan lopezAún no hay calificaciones
- Historia Clinica - Tatiana PinzonDocumento11 páginasHistoria Clinica - Tatiana Pinzonjuan lopezAún no hay calificaciones
- Expo AnalisisDocumento12 páginasExpo Analisisjuan lopezAún no hay calificaciones
- Taller Tiro ParabólicoDocumento11 páginasTaller Tiro Parabólicojuan lopezAún no hay calificaciones
- Formato Cursograma AnaliticoDocumento1 páginaFormato Cursograma Analiticojuan lopezAún no hay calificaciones
- Planificación Fisica IDocumento2 páginasPlanificación Fisica IEliana Peña100% (1)
- Silabo DinámicaDocumento11 páginasSilabo DinámicaLMVVAún no hay calificaciones
- Relatividad I PDFDocumento4 páginasRelatividad I PDFMaluMalucillaHPatAún no hay calificaciones
- Assignment Week 2Documento6 páginasAssignment Week 2Ronald BelloAún no hay calificaciones
- TemaDocumento7 páginasTemaFernando VilcaAún no hay calificaciones
- Informe Nro 3 Fisica 1 UnmsmDocumento11 páginasInforme Nro 3 Fisica 1 UnmsmJuan MendozaAún no hay calificaciones
- Movimiento CurvilíneoDocumento5 páginasMovimiento CurvilíneoARLETTE GUADALUPE LUNA P�REZAún no hay calificaciones
- Tarea 14Documento3 páginasTarea 14Beatriz NMAún no hay calificaciones
- Hoja de Trabajo 05 - Aceleración y Clasificación Del MovimientoDocumento6 páginasHoja de Trabajo 05 - Aceleración y Clasificación Del MovimientoBrandon RodriguezAún no hay calificaciones
- Cinemática Del MCU en Mecánica ClásicaDocumento5 páginasCinemática Del MCU en Mecánica ClásicaDenisse Alejandra RojasAún no hay calificaciones
- Repaso para Examen 1Documento7 páginasRepaso para Examen 1api-366688054100% (1)
- Cinematic ADocumento21 páginasCinematic AcarlosAún no hay calificaciones
- TEMA1 FICHA - Fisica AcusticaDocumento3 páginasTEMA1 FICHA - Fisica Acusticaleonardof1000Aún no hay calificaciones
- Física 5to Año PDFDocumento158 páginasFísica 5to Año PDFcrisar10100% (3)
- Movimiento Plano Restringido en Formato ApaDocumento13 páginasMovimiento Plano Restringido en Formato ApaCarlomagnoBautistoOrtizAún no hay calificaciones
- Taller Cinemática RecuperaciónDocumento10 páginasTaller Cinemática RecuperaciónDiego LuzuriagaAún no hay calificaciones
- Fisica - Cpu Unprg I - TigreDocumento7 páginasFisica - Cpu Unprg I - TigreNobel OficialAún no hay calificaciones
- Laboratorio #2 Fisica Mrua Mru.Documento11 páginasLaboratorio #2 Fisica Mrua Mru.Daniela OstiaAún no hay calificaciones
- Matemáticas Iii PDFDocumento24 páginasMatemáticas Iii PDFMichel FernellyAún no hay calificaciones
- Fuerzas InercialesDocumento8 páginasFuerzas InercialesJaime Fernando Garcia JimenezAún no hay calificaciones
- Fundamentos de GeodesiaDocumento32 páginasFundamentos de GeodesiaRetirados Juntas Medicas PoliciasAún no hay calificaciones
- Fresa DoDocumento16 páginasFresa DoJORGE ANTONIO PEREZ ROBLESAún no hay calificaciones
- Resumen MultiversosDocumento2 páginasResumen Multiversosjazz mani100% (1)
- Solucion Primer Taller Fisica MecanicaDocumento3 páginasSolucion Primer Taller Fisica Mecanicagerman peña0% (1)
- CoriolisDocumento27 páginasCoriolisfernandoAún no hay calificaciones
- Tarea de FisicaDocumento5 páginasTarea de FisicaEdwin RamosAún no hay calificaciones
- Rapidez y Velocidad PDFDocumento15 páginasRapidez y Velocidad PDFKaren VelascoAún no hay calificaciones
- Experiencia Práctica Productiva 231Documento4 páginasExperiencia Práctica Productiva 231Tania ChoqueAún no hay calificaciones