También podría gustarte
- Guía para el análisis y solución de problemas de resistencia de materialesDe EverandGuía para el análisis y solución de problemas de resistencia de materialesAún no hay calificaciones
- Resume N Mecanic ADocumento9 páginasResume N Mecanic ADiego Tafur LópezAún no hay calificaciones
- Dinamica Unidad 2Documento20 páginasDinamica Unidad 2Aldo Jair Cardenas GonzalezAún no hay calificaciones
- Capitilo ViDocumento20 páginasCapitilo ViNeptali Lindon Apaza FloresAún no hay calificaciones
- Momento AngularDocumento3 páginasMomento AngularNatiuska DavilaAún no hay calificaciones
- Resumen de Fisica para FinalesDocumento20 páginasResumen de Fisica para FinalesIvan HernandezAún no hay calificaciones
- Ensayo DinamicaDocumento7 páginasEnsayo DinamicaViviana Zelegna Chi VegaAún no hay calificaciones
- Fisica 2 - Rotacion de Cuerpos RigidosDocumento11 páginasFisica 2 - Rotacion de Cuerpos RigidosRamon100% (1)
- Momento de Inercia y CentriodesDocumento24 páginasMomento de Inercia y CentriodeskevinAún no hay calificaciones
- Cinematica de La Partícula1Documento23 páginasCinematica de La Partícula1juan flores ramosAún no hay calificaciones
- Cinetica de ParticulasDocumento9 páginasCinetica de ParticulasTrans-xRojoAún no hay calificaciones
- Trabajo de Fisica 2Documento10 páginasTrabajo de Fisica 2Ronny AlbornozAún no hay calificaciones
- Dinamica RotacionalDocumento9 páginasDinamica Rotacionalfatima larissa rodriguezAún no hay calificaciones
- Cinemática de Cuerpos RígidosDocumento13 páginasCinemática de Cuerpos RígidosMonse100% (1)
- 7 Diagrama de Cuerpo LibreDocumento16 páginas7 Diagrama de Cuerpo Librepedro valenciaAún no hay calificaciones
- 2.4 Movimiento General en El PlanoDocumento8 páginas2.4 Movimiento General en El PlanoToñoCruz100% (2)
- Aplicacion de La Dinamica A La Ingenieria CivilDocumento13 páginasAplicacion de La Dinamica A La Ingenieria CivilEmigdio Alvarez67% (6)
- Informe Numero 6Documento23 páginasInforme Numero 6jherson7olivaresAún no hay calificaciones
- Unidad 5 de DinamicaDocumento11 páginasUnidad 5 de DinamicaUlisesMoralesAún no hay calificaciones
- Momento de InerciaDocumento5 páginasMomento de Inerciawilson ari tipoAún no hay calificaciones
- Cinetica de Los Cuerpos RiguidosDocumento28 páginasCinetica de Los Cuerpos RiguidosEduardoAún no hay calificaciones
- Dinamica Unidad 2Documento13 páginasDinamica Unidad 2Ricardo SotoAún no hay calificaciones
- Lectura Movimiento RotacionalDocumento23 páginasLectura Movimiento Rotacionalandres felipeAún no hay calificaciones
- FISICA Tarea Unidad 3Documento12 páginasFISICA Tarea Unidad 3Damian OconAún no hay calificaciones
- Cinética de Cuerpos Rígidos en Movimiento - InvestigacionDocumento8 páginasCinética de Cuerpos Rígidos en Movimiento - InvestigacionTamar evansAún no hay calificaciones
- Cinematic ADocumento16 páginasCinematic AAndii TapiiaahAún no hay calificaciones
- Trabajo-1 FisicaDocumento23 páginasTrabajo-1 FisicaMalenny Toledo RafaeleAún no hay calificaciones
- Momento AngularDocumento11 páginasMomento AngularArturo Padilla100% (1)
- Asignacion MecanicaDocumento12 páginasAsignacion MecanicaLeonardo Morales0% (1)
- Esparzabg P7Documento9 páginasEsparzabg P7Gabriela Esparza BarrientosAún no hay calificaciones
- Reporte DinamicaDocumento6 páginasReporte DinamicaDIEGO ALAN MIRANDA ESCAMILLAAún no hay calificaciones
- Cinética de Cuerpos RígidosDocumento13 páginasCinética de Cuerpos RígidosEver Garcia RamirezAún no hay calificaciones
- Dinamica U4Documento7 páginasDinamica U4Alex VargasAún no hay calificaciones
- Ecuaciones de Movimiento 1Documento14 páginasEcuaciones de Movimiento 1Luis Huaman QuispeAún no hay calificaciones
- Aplicacion de La Dinamica A La Ingenieria CivilDocumento13 páginasAplicacion de La Dinamica A La Ingenieria CivilKENNY REMBERTO RODRIGUEZ SANDOVALAún no hay calificaciones
- Movimiento PlanoDocumento18 páginasMovimiento PlanoJose Francisco Valdez BautistaAún no hay calificaciones
- Tema 2. Fuerzas Centrales. 2 Ley de KeplerDocumento5 páginasTema 2. Fuerzas Centrales. 2 Ley de Keplerniweh89125Aún no hay calificaciones
- Cinética Plana de Un Cuerpo RígidoDocumento14 páginasCinética Plana de Un Cuerpo RígidoAlberto Chamo AyalaAún no hay calificaciones
- Dinámica - 4.3Documento34 páginasDinámica - 4.3Jose AndresAún no hay calificaciones
- Cuerpos Rigidos - DinamicaDocumento16 páginasCuerpos Rigidos - DinamicaDaniel Chavez100% (2)
- Ecuacion Del Moviemto EncoordenadasDocumento16 páginasEcuacion Del Moviemto EncoordenadasRodney FigueroaAún no hay calificaciones
- 2 DimenDocumento6 páginas2 DimenJonathan RcaAún no hay calificaciones
- G02 TG04 - Movimiento Dinámico de Una Partícula Ruiz Parte 1Documento8 páginasG02 TG04 - Movimiento Dinámico de Una Partícula Ruiz Parte 1Duanny RuizAún no hay calificaciones
- Tarea de Investigación No 3Documento12 páginasTarea de Investigación No 3alexis.rayo2003Aún no hay calificaciones
- Movimiento Armonico Simple Informe Fisica IiiDocumento7 páginasMovimiento Armonico Simple Informe Fisica Iiisavm94Aún no hay calificaciones
- Dinamica RotacionalDocumento31 páginasDinamica RotacionalJoel Luis Carlos Velásquez0% (2)
- Cinemática Plana Del Cuerpo RígidoDocumento10 páginasCinemática Plana Del Cuerpo RígidoDavid RamirezAún no hay calificaciones
- Avance #01. Trabajo de Investigación de Aplicación de La Física A La Ingeniería. Física de Los Cuerpos Rígidos. Ciclo 2021 - IDocumento7 páginasAvance #01. Trabajo de Investigación de Aplicación de La Física A La Ingeniería. Física de Los Cuerpos Rígidos. Ciclo 2021 - ILuigi AndersonAún no hay calificaciones
- Informe Din..Documento9 páginasInforme Din..victorAún no hay calificaciones
- 5Documento7 páginas5Edwin VelazquezAún no hay calificaciones
- Trabajo Mecanica General 2 Dinamica FDocumento13 páginasTrabajo Mecanica General 2 Dinamica FKatherine Loredana Espinoza SáezAún no hay calificaciones
- Investigacion EstructuraDocumento5 páginasInvestigacion EstructuraFelixAún no hay calificaciones
- Resumen Tema 5Documento12 páginasResumen Tema 5Liliana VarelaAún no hay calificaciones
- DinamicaDocumento10 páginasDinamicaalvaro alexis muñoz cidAún no hay calificaciones
- Mecánica y MecanismosDocumento17 páginasMecánica y MecanismosRoger ChungAún no hay calificaciones
- Maquinaria Pesada y Movimientos de TierraDocumento33 páginasMaquinaria Pesada y Movimientos de TierraLeonardo DiazAún no hay calificaciones
- Cinematic A de La RotacionDocumento6 páginasCinematic A de La RotacionAurelio AntonioAún no hay calificaciones
- Momentos de velocidad: Capturando la dinámica: conocimientos sobre la visión por computadoraDe EverandMomentos de velocidad: Capturando la dinámica: conocimientos sobre la visión por computadoraAún no hay calificaciones
- 343-El Nuevo Audi A4'05Documento32 páginas343-El Nuevo Audi A4'05maxaub82100% (5)
- Ensayo de Dureza Acero 1045Documento4 páginasEnsayo de Dureza Acero 1045CarlosColoradoGarzón100% (1)
- Evalaucion Icfes Leyes de NewtonDocumento4 páginasEvalaucion Icfes Leyes de NewtondugAún no hay calificaciones
- Sistema de Encendido ConvencionalDocumento65 páginasSistema de Encendido ConvencionalDenis UgeñoAún no hay calificaciones
- Pts-Gte-Ins-Mc-001-Rb. MC Válvulas de ControlDocumento18 páginasPts-Gte-Ins-Mc-001-Rb. MC Válvulas de ControlLuis Gabriel Gomez AmorteguiAún no hay calificaciones
- Ejercicios para Estudiar - 2019-2Documento3 páginasEjercicios para Estudiar - 2019-2angelicasofia2106Aún no hay calificaciones
- Ejercicios de La Primera Ley de La TermodinámicaDocumento1 páginaEjercicios de La Primera Ley de La TermodinámicaAbilene WerklikeAún no hay calificaciones
- Opfm 1aDocumento10 páginasOpfm 1aSergio MoralesAún no hay calificaciones
- Torque de Pernos y Caracteristicas de PernosDocumento17 páginasTorque de Pernos y Caracteristicas de PernosIvan Alfredo Parra Casarino100% (1)
- Vapor de Agua para Dar MovimientoDocumento27 páginasVapor de Agua para Dar MovimientoSandra Milena Luna Delgado0% (1)
- Principio de PalancaDocumento8 páginasPrincipio de PalancaPaola Ramos GonzálezAún no hay calificaciones
- Techos Con Perfiles AerodinamicosDocumento11 páginasTechos Con Perfiles AerodinamicosCarlos OjedaAún no hay calificaciones
- Electricidad 1.7Documento1 páginaElectricidad 1.7Maria SalcedoAún no hay calificaciones
- NS-034 Criterios para Diseños de Conducciones y Líneas ExpresasDocumento27 páginasNS-034 Criterios para Diseños de Conducciones y Líneas ExpresasMiguel RamírezAún no hay calificaciones
- DSV 15-32 - Espanhol 2005Documento12 páginasDSV 15-32 - Espanhol 2005RenatoAún no hay calificaciones
- Taller Movimiento Circular Carlos OsorioDocumento11 páginasTaller Movimiento Circular Carlos OsoriocarlososoriorAún no hay calificaciones
- Caterpillar 336DL Specification PDF - 6 (1) TRADUCIDODocumento24 páginasCaterpillar 336DL Specification PDF - 6 (1) TRADUCIDOkatty ccamaAún no hay calificaciones
- Razon de CambioDocumento5 páginasRazon de CambioJose Fernando Ramos YampasiAún no hay calificaciones
- Informe Laboratorio Pendulo Oscilaciones Torsionales Forzadas-2Documento24 páginasInforme Laboratorio Pendulo Oscilaciones Torsionales Forzadas-2Hernan David ValbuenaAún no hay calificaciones
- Ejemplos Por Deformacion y CorteDocumento11 páginasEjemplos Por Deformacion y CortebyronAún no hay calificaciones
- Equilibrio FisicoDocumento2 páginasEquilibrio FisicoRainiery DiazAún no hay calificaciones
- Practica #3 Ondas MecanicasDocumento7 páginasPractica #3 Ondas MecanicasCristian AguilarAún no hay calificaciones
- Fundamentos Del Trabajo Mecánico 2Documento79 páginasFundamentos Del Trabajo Mecánico 2MARÍA FERNANDA VASQUEZ MOLINAAún no hay calificaciones
- Constitución de La Caja de CambiosDocumento3 páginasConstitución de La Caja de Cambiosmmane7155Aún no hay calificaciones
- Suspensión Independiente Por Barra de TorsiónDocumento20 páginasSuspensión Independiente Por Barra de TorsiónJulio Cesar Casiano67% (3)
- Manual Uso TCD12 16 Tier4Documento88 páginasManual Uso TCD12 16 Tier4BrianAún no hay calificaciones
- Clasificacion de Las Maquinas ElectricasDocumento8 páginasClasificacion de Las Maquinas ElectricasElvis StevenAún no hay calificaciones
- Discover - 125 - New Baja - 2011Documento34 páginasDiscover - 125 - New Baja - 2011Carlos Romero Gonzales100% (1)
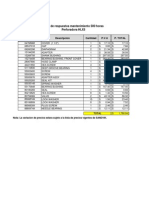
- Lista de Repuestos HLX5Documento10 páginasLista de Repuestos HLX5William QuilicheAún no hay calificaciones
- 1IV21-PRACTICA 7 - SECCION B - Rosas Monroy Ximena VictoriaDocumento7 páginas1IV21-PRACTICA 7 - SECCION B - Rosas Monroy Ximena VictoriaMontesinos González Gabriela BereniceAún no hay calificaciones