También podría gustarte
- Memoria CalculoDocumento5 páginasMemoria CalculocarlosAún no hay calificaciones
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Obtención de Parámetros Del Circuito Equivalente Del Motor.Documento11 páginasObtención de Parámetros Del Circuito Equivalente Del Motor.Tomas BautistaAún no hay calificaciones
- Modelado Matemático Del Sistema de Control Del Motor de Corriente AlternaDocumento6 páginasModelado Matemático Del Sistema de Control Del Motor de Corriente AlternaAlejo Mejía67% (3)
- Examen Nps. de Gnosias y PraxiasDocumento9 páginasExamen Nps. de Gnosias y PraxiasAntonio Solano50% (2)
- Motores de InduccionDocumento30 páginasMotores de InduccionRomario Vasquez SanchezAún no hay calificaciones
- Unidad 2 Circuito EquivalenteDocumento28 páginasUnidad 2 Circuito EquivalenteGuillermo SosaAún no hay calificaciones
- Pre-Informe Maquina Asincrona Vacio y CortoDocumento5 páginasPre-Informe Maquina Asincrona Vacio y CortosandraAún no hay calificaciones
- Circuito Equivalente de Un Motor de InducciónDocumento16 páginasCircuito Equivalente de Un Motor de InducciónJave Zabdiel Hernandez Marin50% (2)
- 2 - Circuito Equivalente de Un Motor de InducciónDocumento37 páginas2 - Circuito Equivalente de Un Motor de InducciónMatias Alejandro Hevia Retamal100% (1)
- Motor de InducciónDocumento34 páginasMotor de InducciónPerez Ibañez OliverAún no hay calificaciones
- La Máquina AsíncronaDocumento7 páginasLa Máquina Asíncronayeltsinmerma123Aún no hay calificaciones
- Motor de InduccionDocumento9 páginasMotor de InduccionJosé Luis SonccoAún no hay calificaciones
- 21 - 29 - Ensayos Motor AsincrDocumento9 páginas21 - 29 - Ensayos Motor AsincrRicardo PedrozaAún no hay calificaciones
- Maquinasasincronas 131210154034 Phpapp02Documento36 páginasMaquinasasincronas 131210154034 Phpapp02Isrrael SaraguroAún no hay calificaciones
- Lab 7Documento5 páginasLab 7kevinAún no hay calificaciones
- Principio de Funcionamiento Del Motor de InduccionDocumento20 páginasPrincipio de Funcionamiento Del Motor de InduccionAndrea GarciaAún no hay calificaciones
- Principio de Funcionamiento Del Motor de Induccion.Documento20 páginasPrincipio de Funcionamiento Del Motor de Induccion.Lewis Llq67% (3)
- Investigación Motores de Inducción y Especiales.Documento54 páginasInvestigación Motores de Inducción y Especiales.guada12345Aún no hay calificaciones
- Deber 5Documento5 páginasDeber 5MiguelAún no hay calificaciones
- Circuito Equivalente Del Motor de Induccion E4-2 g5Documento7 páginasCircuito Equivalente Del Motor de Induccion E4-2 g5Krendenisse RmAún no hay calificaciones
- Obtencion de Circuito Equivalente Aproximado PDFDocumento13 páginasObtencion de Circuito Equivalente Aproximado PDFIvan Edy DominguezAún no hay calificaciones
- S14.s27 - MaterialDocumento31 páginasS14.s27 - MaterialJonathanCatariAún no hay calificaciones
- Practica 2Documento11 páginasPractica 2Ike EscoberAún no hay calificaciones
- Cap 11 - La Maquina de Induccion Como TransformadorDocumento4 páginasCap 11 - La Maquina de Induccion Como TransformadorOliverFrancoCruzAranibarAún no hay calificaciones
- Capitulo 6 Motores de InduccionDocumento37 páginasCapitulo 6 Motores de InduccionelianavegatAún no hay calificaciones
- Circuito Semejante Del Motor de AsincronicoDocumento17 páginasCircuito Semejante Del Motor de Asincronicojomaz7112zajmAún no hay calificaciones
- Motor de Induccion TrifasicaDocumento17 páginasMotor de Induccion TrifasicaJulioAún no hay calificaciones
- Clasificacion y Metodos de ArranqueDocumento89 páginasClasificacion y Metodos de Arranquebetitoooo100% (1)
- 08-Circuito Equivalente de Las Máquinas Asíncronas Trifásicas PDFDocumento44 páginas08-Circuito Equivalente de Las Máquinas Asíncronas Trifásicas PDFYordan Morales AceroAún no hay calificaciones
- Motor de Reluctancia ConmutadaDocumento27 páginasMotor de Reluctancia ConmutadaIsrael MacancelaAún no hay calificaciones
- El Generador de InducciónDocumento30 páginasEl Generador de InducciónEmiliano MoralesAún no hay calificaciones
- APUNTES MAQUINAS ELECTRICAS - U 3 v1.1Documento3 páginasAPUNTES MAQUINAS ELECTRICAS - U 3 v1.1Byron David MoralesAún no hay calificaciones
- Arranque y Control de Velocidad de Los Motores de Inducción.Documento55 páginasArranque y Control de Velocidad de Los Motores de Inducción.Alejandro Cortes DominguezAún no hay calificaciones
- Circuito de Motor TrifásicoDocumento6 páginasCircuito de Motor TrifásicoJOSEROBERTO OLIVERA CUEVAAún no hay calificaciones
- 7-Filminas MAT - 11 - 21Documento78 páginas7-Filminas MAT - 11 - 21josefinaAún no hay calificaciones
- Clase 09 - ML 244 - 22 de Abril de 2021-OkDocumento44 páginasClase 09 - ML 244 - 22 de Abril de 2021-OkTomas gomezAún no hay calificaciones
- Unidad 8Documento26 páginasUnidad 8nicoagustinetooAún no hay calificaciones
- Máquinas Asíncronas 2. Circuito EquivalenteDocumento10 páginasMáquinas Asíncronas 2. Circuito EquivalenteSamuel RodríguezAún no hay calificaciones
- Pruebas de Motores de InduccionDocumento10 páginasPruebas de Motores de Induccionemmanuel reyes reyesAún no hay calificaciones
- Métodos de ArranqueDocumento37 páginasMétodos de Arranque'LautaroMedrano100% (1)
- Resumen de Generadores SíncronosDocumento6 páginasResumen de Generadores Síncronosfany pmAún no hay calificaciones
- CUESTIONARIO de Maquinas ElectricasDocumento5 páginasCUESTIONARIO de Maquinas ElectricasSting TejadaAún no hay calificaciones
- 05 - Ie920 - Me2 - Mi-Determinación de Los ParámetrosDocumento12 páginas05 - Ie920 - Me2 - Mi-Determinación de Los ParámetrosRoger Daniel Piovet GarcíaAún no hay calificaciones
- Informe Final 3 - Grande GaravitoDocumento24 páginasInforme Final 3 - Grande GaravitoGIANFRANCO ANDRE GRANDE GARAVITOAún no hay calificaciones
- 14 Cap Arranque Motor Trifásico de InducciónDocumento15 páginas14 Cap Arranque Motor Trifásico de InducciónEscobar Rocha Carlos AdrianAún no hay calificaciones
- Cap1 - Principios de Funcionamiento de La Maquina de Corriente Continua OKDocumento38 páginasCap1 - Principios de Funcionamiento de La Maquina de Corriente Continua OKricardoAún no hay calificaciones
- Máquinas Asincronas-1Documento18 páginasMáquinas Asincronas-1Jhon Cristhian Torrico ChavezAún no hay calificaciones
- Circuito Equivalente Estator y Conceptos GeneralesDocumento9 páginasCircuito Equivalente Estator y Conceptos GeneralesEdgar Ruben Roman GomezAún no hay calificaciones
- TransformadoresDocumento46 páginasTransformadoresAbraham Galindo FloresAún no hay calificaciones
- U3 ML202 3. - Teoría de Los Motores de InducciónDocumento26 páginasU3 ML202 3. - Teoría de Los Motores de Inducciónanthony190205Aún no hay calificaciones
- 2.5 Obtención de Parámetros Del Circuito Equivalente AproximadoDocumento5 páginas2.5 Obtención de Parámetros Del Circuito Equivalente AproximadoLuis Enrique Mendez Robles50% (2)
- Tema 2 TrifasicosDocumento36 páginasTema 2 Trifasicossantos aguileraAún no hay calificaciones
- Examen Parcial Maquinas Electricas 2Documento18 páginasExamen Parcial Maquinas Electricas 2RENZO JOEL PUMACALLAO ROLDANAún no hay calificaciones
- Formulario Máquinas Electricas FinalDocumento10 páginasFormulario Máquinas Electricas FinalMichael Blas100% (1)
- Mantenimiento de Maquinas ElectfricasDocumento14 páginasMantenimiento de Maquinas ElectfricasJhoel QuispeAún no hay calificaciones
- Laboratorio 50 ConversionDocumento6 páginasLaboratorio 50 ConversionJorgeVasquezAún no hay calificaciones
- Problemas ResueltosDocumento117 páginasProblemas ResueltosJuan Lope De Verga100% (1)
- Características Del Motor de Inducción Bajo Varias Condiciones de CargaDocumento43 páginasCaracterísticas Del Motor de Inducción Bajo Varias Condiciones de CargaJuan Carlos PozoAún no hay calificaciones
- Curso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorDe EverandCurso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorAún no hay calificaciones
- Montaje y mantenimiento de transformadores. ELEE0109De EverandMontaje y mantenimiento de transformadores. ELEE0109Aún no hay calificaciones
- Práctica Calificada #2 - C10ADocumento5 páginasPráctica Calificada #2 - C10AAntonio Solano100% (1)
- 1 Pract NEUMÁTICA 2022 2Documento7 páginas1 Pract NEUMÁTICA 2022 2Antonio SolanoAún no hay calificaciones
- Laboratorio #3 - Refrigeración IndustrialDocumento13 páginasLaboratorio #3 - Refrigeración IndustrialAntonio Solano100% (1)
- Sesión 08-MT-2022Documento35 páginasSesión 08-MT-2022Antonio Solano100% (2)
- Lab N°1 RefrigeracionDocumento13 páginasLab N°1 RefrigeracionAntonio SolanoAún no hay calificaciones
- Glab S04 Jvital 2022 02Documento13 páginasGlab S04 Jvital 2022 02Antonio SolanoAún no hay calificaciones
- Simbologia UnifilarDocumento2 páginasSimbologia UnifilarAntonio SolanoAún no hay calificaciones
- BASESDocumento7 páginasBASESAntonio SolanoAún no hay calificaciones
- MINSA - Carnet VacunaciónDocumento1 páginaMINSA - Carnet VacunaciónAntonio SolanoAún no hay calificaciones
- LABORATORIO 1 - TerminadoDocumento27 páginasLABORATORIO 1 - TerminadoAntonio SolanoAún no hay calificaciones
- Constancia de Aseguramiento: Asegurado (S)Documento2 páginasConstancia de Aseguramiento: Asegurado (S)Antonio SolanoAún no hay calificaciones
- El Machismo en La Sociedad EnsayoDocumento8 páginasEl Machismo en La Sociedad EnsayoAntonio SolanoAún no hay calificaciones
- Guía de EnsayoDocumento5 páginasGuía de EnsayoAntonio SolanoAún no hay calificaciones
- Tema 01.el Hombre en Busca de SentidoDocumento4 páginasTema 01.el Hombre en Busca de SentidoAntonio Solano100% (1)
- PROBABILIDADES Trabajo Final.Documento8 páginasPROBABILIDADES Trabajo Final.Antonio Solano100% (1)
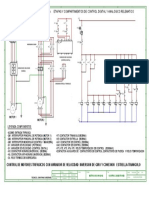
- Control de Dos Motores Trifasicos Con Variador de Velocidad, Inversion de Giro y Conexion Estrella-TrianguloDocumento1 páginaControl de Dos Motores Trifasicos Con Variador de Velocidad, Inversion de Giro y Conexion Estrella-TrianguloJonathan Cardenas0% (1)
- Master Con GuiasDocumento280 páginasMaster Con GuiasFulk UlisesAún no hay calificaciones
- Cap 4Documento50 páginasCap 4Pedro AqpAún no hay calificaciones
- Lab 40 N2 Máquinas ElecDocumento6 páginasLab 40 N2 Máquinas ElecJosefath GonzalezAún no hay calificaciones
- Diagnostico Mpotores International CRDocumento163 páginasDiagnostico Mpotores International CRobedjuantj92% (13)
- Instituto Tecnológico de Ciudad Guzmán: Departamento de Ingeniería EléctricaDocumento45 páginasInstituto Tecnológico de Ciudad Guzmán: Departamento de Ingeniería EléctricaLucas Rizo AlexisAún no hay calificaciones
- Alumbrado PublicoDocumento16 páginasAlumbrado Publicoxray123zzzAún no hay calificaciones
- Introducción A Sistemas MecatronicosDocumento38 páginasIntroducción A Sistemas MecatronicosOmar Alvarez100% (1)
- Motor SincronoDocumento13 páginasMotor SincronoLuis MoralesAún no hay calificaciones
- Lab n3 Chancado de MineralesDocumento2 páginasLab n3 Chancado de MineralesFelipe Javier Arias CubillosAún no hay calificaciones
- TroceadoresDocumento9 páginasTroceadoresLuis Enrique ValenciaAún no hay calificaciones
- Evaluacion Encendido SeptiembreDocumento10 páginasEvaluacion Encendido SeptiembreCamilo Andres Penagos S.Aún no hay calificaciones
- Anexos Electricidad M2S2Documento45 páginasAnexos Electricidad M2S2Lorena Cruz SaldañaAún no hay calificaciones
- Numeros Complejos en IngenieriaDocumento6 páginasNumeros Complejos en IngenieriaFernando MendozaAún no hay calificaciones
- Guía Práctica No2Documento5 páginasGuía Práctica No2santiagoAún no hay calificaciones
- T Utc 3790Documento141 páginasT Utc 3790Carlos Lino Rojas AgüeroAún no hay calificaciones
- Clase 09 INTERRUPTORES ELSEDocumento38 páginasClase 09 INTERRUPTORES ELSEElvis Quille ApazaAún no hay calificaciones
- FT - CLAMPER Solar SB 1000 18ka 1-2E - 1S - 00 - Espanhol PDFDocumento2 páginasFT - CLAMPER Solar SB 1000 18ka 1-2E - 1S - 00 - Espanhol PDFAlberto GanelaAún no hay calificaciones
- Presupuesto Instalaciones Electricas Mini PachiteaDocumento2 páginasPresupuesto Instalaciones Electricas Mini PachiteaEsteban BlasAún no hay calificaciones
- LABORATORIO N5 ControlDocumento10 páginasLABORATORIO N5 Controlフォッケル パベル ホスセフAún no hay calificaciones
- Reguladores de Voltaje Con Diodos ZenerDocumento4 páginasReguladores de Voltaje Con Diodos ZenerjailenAún no hay calificaciones
- ListaDespacho Transformador 3 MVA SIEMENSDocumento4 páginasListaDespacho Transformador 3 MVA SIEMENSjairo mahechaAún no hay calificaciones
- Sistema FotovoltaicoDocumento5 páginasSistema FotovoltaicoDaniel Figueroa HernandezAún no hay calificaciones
- Universidad Nacional de San Antonio Abad DelcuscoDocumento358 páginasUniversidad Nacional de San Antonio Abad DelcuscoLUIS ALBERTO JUNIOR QUISPESUCSO CCALLATAAún no hay calificaciones
- Cuestionario Previo 3Documento4 páginasCuestionario Previo 3Pedro SaavedraAún no hay calificaciones
- DOC-CBC-ETG-Especificaciones Ténicas Eléctricas GeneralesDocumento48 páginasDOC-CBC-ETG-Especificaciones Ténicas Eléctricas GeneralesJosé Ignacio J. Sarria MartínezAún no hay calificaciones
- UNIDAD 1. - INTRODUCCIÓN PresentaciónDocumento23 páginasUNIDAD 1. - INTRODUCCIÓN PresentaciónDaniel SanchezAún no hay calificaciones
- Afiche Maquinas Electricas Rotatorias-2021Documento3 páginasAfiche Maquinas Electricas Rotatorias-2021Jonathan DvbbsAún no hay calificaciones
- P - 14 Medicion Combinada Sobre Un Circuito o Sistema Propuesto Fuente de Alimentacion de VoltajeDocumento5 páginasP - 14 Medicion Combinada Sobre Un Circuito o Sistema Propuesto Fuente de Alimentacion de VoltajeHookAún no hay calificaciones