También podría gustarte
- Motor De Vórtice: Crear un tornado de fuego en turbinas para obtener más energíaDe EverandMotor De Vórtice: Crear un tornado de fuego en turbinas para obtener más energíaAún no hay calificaciones
- EySer05 Prueba Del Sensor MAP, Chevrolet Chevy P0105 P0106 P0107 P0108 P0109 - LUFFIDocumento1 páginaEySer05 Prueba Del Sensor MAP, Chevrolet Chevy P0105 P0106 P0107 P0108 P0109 - LUFFIJorge Ruben EscuderoAún no hay calificaciones
- Examen de preparación para CDL: Conocimientos GeneralesDe EverandExamen de preparación para CDL: Conocimientos GeneralesAún no hay calificaciones
- Informe Practica 11 Alarma ChevyDocumento7 páginasInforme Practica 11 Alarma ChevyBryan VelozAún no hay calificaciones
- Direccion ElectroasistidaDocumento17 páginasDireccion ElectroasistidaAlanAún no hay calificaciones
- Desarmar Tablero VW GolDocumento17 páginasDesarmar Tablero VW GolQete_arg100% (2)
- Cobertura Vedis Kit MexicoDocumento3 páginasCobertura Vedis Kit MexicoAutoland MexicoAún no hay calificaciones
- Sintomas de Sensores y ActuadoresDocumento27 páginasSintomas de Sensores y ActuadoresMiguel SánchezAún no hay calificaciones
- Pinout Diagramas PCM 112 PinesDocumento33 páginasPinout Diagramas PCM 112 PinesAuto Repair solo fuel inyeccionAún no hay calificaciones
- Circuito de AlumbradoDocumento11 páginasCircuito de AlumbradoAndrés Jaramillo ChevezAún no hay calificaciones
- Manual Magnetti Marelli en EspañolDocumento14 páginasManual Magnetti Marelli en Españoljavier rodrigo mazzocchiAún no hay calificaciones
- Manual de Problemas Golf A4Documento6 páginasManual de Problemas Golf A4Fred ArriolaAún no hay calificaciones
- Reporte de Sensores MAP Y MAF 1Documento8 páginasReporte de Sensores MAP Y MAF 1Saul Serrano CahuantziAún no hay calificaciones
- PCM Módulo de Control Del Tren de Potencia EXPONERDocumento4 páginasPCM Módulo de Control Del Tren de Potencia EXPONERSoledad KaryAún no hay calificaciones
- Taller Automotriz Oficial 2021Documento51 páginasTaller Automotriz Oficial 2021Jhonny Beltran DiazAún no hay calificaciones
- GuiaDocumento62 páginasGuiaomar fAún no hay calificaciones
- Alternadores y Reguladores de TensionDocumento40 páginasAlternadores y Reguladores de TensionLuigui Lopez LlancaAún no hay calificaciones
- Sensores de Chevy Su Funcionamiento y Sus Diagnosticos de FallasDocumento14 páginasSensores de Chevy Su Funcionamiento y Sus Diagnosticos de Fallasguillermo1serranoAún no hay calificaciones
- Modulo de Control Electrónico (ECU)Documento38 páginasModulo de Control Electrónico (ECU)VamalucardAún no hay calificaciones
- Bujes PointerDocumento8 páginasBujes PointerAaron Miguel Torres RamírezAún no hay calificaciones
- Encendido Electrc3b3nico PDFDocumento160 páginasEncendido Electrc3b3nico PDFRoger Martinez100% (1)
- SensoresDocumento23 páginasSensoresJose ElizaldeAún no hay calificaciones
- Notas de Forma de Onda de Encendido Bujias BobinasDocumento7 páginasNotas de Forma de Onda de Encendido Bujias Bobinasjuan carlos cabreraAún no hay calificaciones
- Definicion de Los Sensores Controladores Del AutomovilDocumento11 páginasDefinicion de Los Sensores Controladores Del AutomovilAlma Torres0% (1)
- Escaneo AutomotrizDocumento31 páginasEscaneo AutomotrizCarlos CamachoAún no hay calificaciones
- Sincronizacion Variable de Valvulas en Motores NissanDocumento4 páginasSincronizacion Variable de Valvulas en Motores NissanHilario Gayosso CruzAún no hay calificaciones
- Qué Es MegaSquirtDocumento13 páginasQué Es MegaSquirtGuillermo Fernando Cerda SerranoAún no hay calificaciones
- Funcionamiento y Fallas de SensoresDocumento4 páginasFuncionamiento y Fallas de SensoresGuillermo Cars100% (1)
- Examen de PlatinaDocumento123 páginasExamen de PlatinaMecanica AutomotrizAún no hay calificaciones
- Fuel Inyection ProcesDocumento61 páginasFuel Inyection Procesjulio arianaAún no hay calificaciones
- Codigos Sin Escaner para Chevy OBD IDocumento8 páginasCodigos Sin Escaner para Chevy OBD Ijorge antonio guillenAún no hay calificaciones
- Falla en El Sistema PATSDocumento2 páginasFalla en El Sistema PATSgtranAún no hay calificaciones
- Verificación de Computadoras Automotrices ChryslerDocumento12 páginasVerificación de Computadoras Automotrices ChryslerJonathan Emmanuel100% (1)
- Instructivo Funciones Especiales CJ 4 LA PDFDocumento97 páginasInstructivo Funciones Especiales CJ 4 LA PDFRaymundo SanchezAún no hay calificaciones
- Red de Comunicacion de Los Modulos PDFDocumento46 páginasRed de Comunicacion de Los Modulos PDFIvan Alex EscobarAún no hay calificaciones
- Curso Basico Nissan Tidda 2015Documento35 páginasCurso Basico Nissan Tidda 2015Jose GonzalezAún no hay calificaciones
- Curso Sena Obd1Documento17 páginasCurso Sena Obd1Alberjose Sanchez RuizAún no hay calificaciones
- Manual Sistema Refrigeracion Aire Agua Componentes Radiador Circuito Termostato Refrigerantes Funcionamiento Limpieza PDFDocumento34 páginasManual Sistema Refrigeracion Aire Agua Componentes Radiador Circuito Termostato Refrigerantes Funcionamiento Limpieza PDFJorgeAún no hay calificaciones
- Unidad 3 AlimentacionDocumento46 páginasUnidad 3 AlimentacionAdolfo GeerdtsAún no hay calificaciones
- Funciones y Conexiones de ReguladorDocumento4 páginasFunciones y Conexiones de Reguladormaria cedeñoAún no hay calificaciones
- Panel de IntrumentosDocumento15 páginasPanel de IntrumentosLuis Manuel Misal Yepez100% (1)
- Diagrama Electrico Pointer 2000 Cofre-1 PDFDocumento1 páginaDiagrama Electrico Pointer 2000 Cofre-1 PDFBechelani EsquivelAún no hay calificaciones
- 1 Incylinder EspañolDocumento5 páginas1 Incylinder EspañolRoger Ortega100% (1)
- Sistema de AlarmaDocumento23 páginasSistema de AlarmaFRANK TORRES DIAZ100% (1)
- Codigos de Falla, VW AudiDocumento2 páginasCodigos de Falla, VW AudiDaniGam0% (1)
- CaudalímetrosDocumento4 páginasCaudalímetrosdesertor20Aún no hay calificaciones
- P0107 Voltaje Bajo de Circuito de Sensor de Presión Absoluta Del Múltiple (MAP)Documento3 páginasP0107 Voltaje Bajo de Circuito de Sensor de Presión Absoluta Del Múltiple (MAP)SatooAtheiAún no hay calificaciones
- Examen Sistema EnfriamientoDocumento4 páginasExamen Sistema EnfriamientoJose RuizAún no hay calificaciones
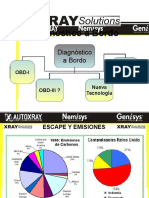
- 2005-12-17, Capacitacion Xray, Diagnostico A BordoDocumento37 páginas2005-12-17, Capacitacion Xray, Diagnostico A BordoIrving Andrade Chigo100% (1)
- Como Leer Un Diagrama ElectronicoDocumento6 páginasComo Leer Un Diagrama Electronicomaldini03Aún no hay calificaciones
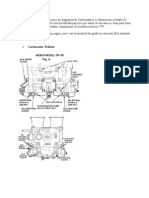
- Carburador VWDocumento11 páginasCarburador VWJuan AcostaAún no hay calificaciones
- SENSOR CMP - Qué Es, Ubicación, Funcionamiento y FallasDocumento4 páginasSENSOR CMP - Qué Es, Ubicación, Funcionamiento y FallasenverAún no hay calificaciones
- Fusibles BochoDocumento5 páginasFusibles BochoFrancisco López Rosas100% (1)
- Sensores FordDocumento3 páginasSensores FordAlex Baptist AkeAún no hay calificaciones
- 00 010Documento182 páginas00 010THEBONAAún no hay calificaciones
- Características Del Sistema de Inyección Del Motor 1AVBDocumento6 páginasCaracterísticas Del Sistema de Inyección Del Motor 1AVBKevin StrongAún no hay calificaciones
- Curso VWDocumento219 páginasCurso VWDaniel Frediani86% (7)
- Sistema Cammon RaillDocumento30 páginasSistema Cammon RaillOmarziño Galarce Briceño100% (1)
- ssp360 3 MOTOR VR6 FSI PDFDocumento24 páginasssp360 3 MOTOR VR6 FSI PDFCarlos Garcia GodoyAún no hay calificaciones
- Inyección Gol PDFDocumento31 páginasInyección Gol PDFsdicarsservicelsd100% (1)
- Investigaciòn FormativaDocumento1 páginaInvestigaciòn FormativaJulián Darío Barrero ArizaAún no hay calificaciones
- Lineaminetos Arquitectónicos Colegi0s 10 PDFDocumento323 páginasLineaminetos Arquitectónicos Colegi0s 10 PDFJulián Darío Barrero ArizaAún no hay calificaciones
- Taller de Ingeniería FinancieraDocumento4 páginasTaller de Ingeniería FinancieraJulián Darío Barrero ArizaAún no hay calificaciones
- Manual de Dotaciones de Colegios PDFDocumento281 páginasManual de Dotaciones de Colegios PDFJulián Darío Barrero ArizaAún no hay calificaciones
- Construcción de Un Portafolio de RF 2013 2Documento1 páginaConstrucción de Un Portafolio de RF 2013 2Julián Darío Barrero ArizaAún no hay calificaciones
- Penta HoDocumento252 páginasPenta HoJulián Darío Barrero ArizaAún no hay calificaciones
- Penta HoDocumento252 páginasPenta HoJulián Darío Barrero ArizaAún no hay calificaciones
- Twingo TirDocumento33 páginasTwingo TirJulián Darío Barrero Ariza100% (1)
- Koha Vs OpenbiblioDocumento15 páginasKoha Vs OpenbiblioJulián Darío Barrero Ariza100% (1)
- Listeria MonocytogenesDocumento15 páginasListeria MonocytogenesXiomara PerezAún no hay calificaciones
- Proyecto de Vida Definitivo IssDocumento75 páginasProyecto de Vida Definitivo IssJuan LujanoAún no hay calificaciones
- Caso Clinico N°3Documento37 páginasCaso Clinico N°3Feler Perez LeonAún no hay calificaciones
- UreaDocumento41 páginasUreaFernanda MartinezAún no hay calificaciones
- Cannalife CompanyDocumento5 páginasCannalife CompanyTatiana SuarezAún no hay calificaciones
- Samu-Sistema de Atención Movil de UrgenciaDocumento18 páginasSamu-Sistema de Atención Movil de UrgenciaKarol M.Aún no hay calificaciones
- Foro Carga Postural y Sus ConsecuenciasDocumento3 páginasForo Carga Postural y Sus ConsecuenciasSoluciones TrabajoAún no hay calificaciones
- Aprendo en Casa 26-10-21Documento3 páginasAprendo en Casa 26-10-21Monica Whitaker0% (1)
- Practica de OrtopediaDocumento9 páginasPractica de OrtopediamelizaAún no hay calificaciones
- Elaboracion de Almibar de PiñaDocumento6 páginasElaboracion de Almibar de Piñafra romario mamani paredesAún no hay calificaciones
- Orden de ServicioDocumento2 páginasOrden de Servicioyeferson garay100% (1)
- Acta de Entrega Del SG-SSTDocumento7 páginasActa de Entrega Del SG-SSTJuanPabloVargas67% (3)
- F6.1 2 3 PAU FísicaModernaDocumento21 páginasF6.1 2 3 PAU FísicaModernaDaniel RodríguezAún no hay calificaciones
- PGIRHYS Dentix CAÑAVERALDocumento49 páginasPGIRHYS Dentix CAÑAVERALAndresHernandezAún no hay calificaciones
- Plan Nacional de TecnovigilanciaDocumento24 páginasPlan Nacional de TecnovigilanciaPaolaNaranjoGodoyAún no hay calificaciones
- Monografia Enfermedades OcupacionalesDocumento22 páginasMonografia Enfermedades OcupacionalesEliseo CcantoAún no hay calificaciones
- Variacion y Temp PDFDocumento13 páginasVariacion y Temp PDFDaniel MartinezAún no hay calificaciones
- Elabora Modelos BidiomensionalesDocumento4 páginasElabora Modelos Bidiomensionalesusuario lopezAún no hay calificaciones
- Satipatthana SuttaDocumento18 páginasSatipatthana SuttaAna Maria Rodriguez RodriguezAún no hay calificaciones
- 6 A4p2 PDFDocumento6 páginas6 A4p2 PDFLina Marcela Paz CastañoAún no hay calificaciones
- Solucionario - Simulacro PrecatolicaDocumento3 páginasSolucionario - Simulacro PrecatolicaLeonardo QuiñonesAún no hay calificaciones
- Cocina PrehispanicaDocumento15 páginasCocina PrehispanicaWill Garcia-SantigoAún no hay calificaciones
- Guia Del Usuario - DigitalDocumento22 páginasGuia Del Usuario - DigitalDiana AcostaAún no hay calificaciones
- Cuestionario de Patologia General IIIDocumento58 páginasCuestionario de Patologia General IIILeón Jean Leon50% (2)
- Balance HidricoDocumento25 páginasBalance HidricoEduardo Luisenrique Sanchez CarrionAún no hay calificaciones
- Informe JoaDocumento11 páginasInforme Joabryan reyespiAún no hay calificaciones
- Capacitancia: La Capacitancia de Un Capacitor Es La Carga Que Éste Almacena Por Unidad de Diferencia de PotencialDocumento21 páginasCapacitancia: La Capacitancia de Un Capacitor Es La Carga Que Éste Almacena Por Unidad de Diferencia de PotencialCarlos MarínAún no hay calificaciones
- Angulos 1eroDocumento4 páginasAngulos 1eroEnrique Manuel Carrizo RomeroAún no hay calificaciones
- F-C-27 Lista Chequeo Andamio CrucetaDocumento1 páginaF-C-27 Lista Chequeo Andamio CrucetafrankruedaboteroAún no hay calificaciones
- Evaluacion Diagnostica Lenguaje 2do 2023Documento9 páginasEvaluacion Diagnostica Lenguaje 2do 2023Gabriel PinoAún no hay calificaciones