También podría gustarte
- Guias de Mantenimiento 2 Ieme 1P 2Q 2021-2022Documento11 páginasGuias de Mantenimiento 2 Ieme 1P 2Q 2021-2022Jose CristianAún no hay calificaciones
- Maquinas Informe 8 PDFDocumento25 páginasMaquinas Informe 8 PDFAntony Eric Romero ParedesAún no hay calificaciones
- PROYECTO456Documento20 páginasPROYECTO456JhonAún no hay calificaciones
- INFO2 JJaraIDocumento29 páginasINFO2 JJaraIJonathan Miguel Rodriguez ArandaAún no hay calificaciones
- Motor DC FinalDocumento18 páginasMotor DC FinalRoro SalazarAún no hay calificaciones
- Seminario ViDocumento41 páginasSeminario ViyamidAún no hay calificaciones
- Laboratorio 8Documento9 páginasLaboratorio 8acuevate10Aún no hay calificaciones
- ML202 - Informe 3 - Motor AC Jaula de ArdillaDocumento42 páginasML202 - Informe 3 - Motor AC Jaula de ArdillaJosé Sotelo100% (3)
- Investigacion Documental de Motores y Generadores CDDocumento23 páginasInvestigacion Documental de Motores y Generadores CDDiego A. MartinezAún no hay calificaciones
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109De EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Aún no hay calificaciones
- Diseño y Construcción de Un Arrancador Suave Aplicado A Un Motor de Inducción TrifásicoDocumento15 páginasDiseño y Construcción de Un Arrancador Suave Aplicado A Un Motor de Inducción Trifásicogiovanny enrique altamarAún no hay calificaciones
- Lab - 03 - Maquinas Ac - Aguilar - Calderon - Leyva - C4-4-ADocumento18 páginasLab - 03 - Maquinas Ac - Aguilar - Calderon - Leyva - C4-4-APiero AguilarAún no hay calificaciones
- Informe 3 ML-202Documento42 páginasInforme 3 ML-202Mauricio RuizAún no hay calificaciones
- Laboratorio n2 de AccionamientoDocumento10 páginasLaboratorio n2 de AccionamientoJuan Quispe GonzalesAún no hay calificaciones
- Reporte Técnico de Aplicación, Características Eléctricas y Mecánicas de Los Motores de CA, CD, Servomotores & Motor A PasosDocumento25 páginasReporte Técnico de Aplicación, Características Eléctricas y Mecánicas de Los Motores de CA, CD, Servomotores & Motor A PasosLuis Adad Mora SolísAún no hay calificaciones
- ML202 Informe 3 Motor AC Jaula de ArdillaDocumento41 páginasML202 Informe 3 Motor AC Jaula de ArdillaLeylaAún no hay calificaciones
- Motores y Generadores SíncronosDocumento34 páginasMotores y Generadores SíncronosLeo Charris BAún no hay calificaciones
- Control de Motores Electricos I TeoríaDocumento65 páginasControl de Motores Electricos I TeoríaYtbdre McHsbhgnfsAún no hay calificaciones
- Manual Motores ElectricosDocumento63 páginasManual Motores Electricosluis taboadaAún no hay calificaciones
- Maquinas Electricas s2Documento27 páginasMaquinas Electricas s2Thanzha Solhedad ShilvaAún no hay calificaciones
- S2 - Contenido - Fundamentos de Máquinas y Herramientas Industriales PDFDocumento27 páginasS2 - Contenido - Fundamentos de Máquinas y Herramientas Industriales PDFCesar Garrido0% (1)
- Conversion Practica 4Documento21 páginasConversion Practica 4Javi AlvezAún no hay calificaciones
- Lab 13 Arranque Estrella TrianguloDocumento12 páginasLab 13 Arranque Estrella TrianguloJuberth Luque HAún no hay calificaciones
- Maese22 U2 DR2Documento41 páginasMaese22 U2 DR2Gabriel Figueroa ChureoAún no hay calificaciones
- Diseño y Control Con PLCDocumento80 páginasDiseño y Control Con PLCLeonardo González100% (2)
- Lab 02 Maquinas Ac Aguilar Calderon Leyva C4-4-ADocumento22 páginasLab 02 Maquinas Ac Aguilar Calderon Leyva C4-4-APiero JhonatanAún no hay calificaciones
- Trabajo Final MotoresDocumento45 páginasTrabajo Final MotorescesarAún no hay calificaciones
- Laboratorio 13 Arranque de Motores Trifásicos Pt2Documento9 páginasLaboratorio 13 Arranque de Motores Trifásicos Pt2Alejandro GallardoAún no hay calificaciones
- Laboratorio 01 - MeiiDocumento8 páginasLaboratorio 01 - MeiiWillian FlavioAún no hay calificaciones
- 5 INFORME La Maquina Sincrona 2Documento27 páginas5 INFORME La Maquina Sincrona 2daniel24Aún no hay calificaciones
- Instalaciones Electricas en Complejos Industriales y ComercialesDocumento11 páginasInstalaciones Electricas en Complejos Industriales y ComercialesjailenAún no hay calificaciones
- Trabajo n1 Maquinas RotaDocumento35 páginasTrabajo n1 Maquinas RotaCarlos MuñozAún no hay calificaciones
- FINAL3 FinfinDocumento25 páginasFINAL3 FinfinSofiaAún no hay calificaciones
- Maquinas Electricas Unidad 1Documento45 páginasMaquinas Electricas Unidad 1Giordano Brito RodriguezAún no hay calificaciones
- Practica 3 - Motor SincronicoDocumento19 páginasPractica 3 - Motor Sincronicoesteban alvarado100% (1)
- Maquinas Electricas TrifasicasDocumento25 páginasMaquinas Electricas Trifasicasneljhors0% (2)
- Arrancadores SuavesDocumento24 páginasArrancadores SuavesZacer DZAún no hay calificaciones
- Ud10ele PDFDocumento0 páginasUd10ele PDFdumperitoAún no hay calificaciones
- Motores CA CD Servomotores y Motores de PasoDocumento38 páginasMotores CA CD Servomotores y Motores de PasoJosué Tristán AlmonasiAún no hay calificaciones
- Laboratorio N°1 - Máquinas AC - La Máquina de InducciónDocumento25 páginasLaboratorio N°1 - Máquinas AC - La Máquina de InducciónJose Antonio100% (1)
- AE Tema2Documento127 páginasAE Tema2Fernando López ExpósitoAún no hay calificaciones
- U3 Máquinas SíncronasDocumento19 páginasU3 Máquinas SíncronasVictor Eduardo Alor CastilloAún no hay calificaciones
- Motores No ConvencionalesDocumento25 páginasMotores No ConvencionalesPaulo FernandezAún no hay calificaciones
- Informe-3 Motor Asincrono Con Rotor Jaula de ArdillaDocumento38 páginasInforme-3 Motor Asincrono Con Rotor Jaula de ArdillaJhonatan Bryan Lulo CasasAún no hay calificaciones
- Brandy Elvis Hilaquita Ttito Labooratorio Maquinas EIIDocumento14 páginasBrandy Elvis Hilaquita Ttito Labooratorio Maquinas EIIBRANDY ELVIS HILAQUITA TTITOAún no hay calificaciones
- Mantenimiento Terminado 2Documento47 páginasMantenimiento Terminado 2Greysi GirónAún no hay calificaciones
- Practica 1Documento21 páginasPractica 1Erick VelasquezAún no hay calificaciones
- Motores de Corriente ContinuaDocumento5 páginasMotores de Corriente ContinuaAurycell RodriguezAún no hay calificaciones
- Manuales TrifacicosDocumento13 páginasManuales TrifacicosIvan GlezAún no hay calificaciones
- Lab. #8 Motor Sincrono TrifasicoDocumento16 páginasLab. #8 Motor Sincrono TrifasicoEINER100% (2)
- LABORATORIO 2 Partes Activas de Maquinas RotativasDocumento15 páginasLABORATORIO 2 Partes Activas de Maquinas Rotativasalexander pumaAún no hay calificaciones
- Investigaciones de Motor de CD MeDocumento17 páginasInvestigaciones de Motor de CD MeSaul Matilde BartoloAún no hay calificaciones
- Laboratorio 3 ArrancadoresDocumento15 páginasLaboratorio 3 ArrancadoresJonathan Neira GonzalezAún no hay calificaciones
- Pauta de Mantención Motor Eléctrico 409Documento8 páginasPauta de Mantención Motor Eléctrico 409blue-americanAún no hay calificaciones
- Informe Circuitos AvaDocumento19 páginasInforme Circuitos AvaRUBEN DARIO MENDOZA MEZAAún no hay calificaciones
- Me Ac 2020Documento123 páginasMe Ac 2020Juan Alfonso Romero Haro100% (2)
- Laboratorio de Maquinas Electricas Sumativa 1 Hermes ChavezDocumento19 páginasLaboratorio de Maquinas Electricas Sumativa 1 Hermes ChavezUreña Personaje Jesus UreñaAún no hay calificaciones
- Motores EléctricosDocumento18 páginasMotores EléctricosRJ Christhian AlondraAún no hay calificaciones
- Curso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorDe EverandCurso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorAún no hay calificaciones
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209De EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Calificación: 5 de 5 estrellas5/5 (2)
- Informe de Laboratorio Motor DahlanderDocumento4 páginasInforme de Laboratorio Motor DahlanderJhon Alexander Correa MendozaAún no hay calificaciones
- Diagrama EscaleraDocumento28 páginasDiagrama EscaleraEmmanuel BeltramoAún no hay calificaciones
- PIEZASDocumento6 páginasPIEZASJhon Alexander Correa MendozaAún no hay calificaciones
- INICIODocumento5 páginasINICIOJhon Alexander Correa MendozaAún no hay calificaciones
- UNIDAD1 Desc ControladoresDocumento13 páginasUNIDAD1 Desc ControladoresNeder Llorente LopezAún no hay calificaciones
- NORMA IEC61131 Programación PLCDocumento18 páginasNORMA IEC61131 Programación PLCMiguel Ángel Ramírez EfigenioAún no hay calificaciones
- Piezas Completas 3Documento11 páginasPiezas Completas 3Jhon Alexander Correa MendozaAún no hay calificaciones
- Piezas Completas 2Documento6 páginasPiezas Completas 2Jhon Alexander Correa MendozaAún no hay calificaciones
- Informe ElectroneumaticaDocumento3 páginasInforme ElectroneumaticaJhon Alexander Correa MendozaAún no hay calificaciones
- Informe Interruptor de PotenciaDocumento7 páginasInforme Interruptor de PotenciaJhon Alexander Correa MendozaAún no hay calificaciones
- Electrónica Digital (4º ESO)Documento16 páginasElectrónica Digital (4º ESO)shensey001Aún no hay calificaciones
- PLC1 S 1Documento13 páginasPLC1 S 1Luis GranadosAún no hay calificaciones
- Informe de Laboratorio Motor DahlanderDocumento4 páginasInforme de Laboratorio Motor DahlanderJhon Alexander Correa MendozaAún no hay calificaciones
- Informe Lab 6Documento4 páginasInforme Lab 6Jhon Alexander Correa MendozaAún no hay calificaciones
- RECTIFICADORESDocumento15 páginasRECTIFICADORESjealvarezbAún no hay calificaciones
- 372 Neu Tema 9 Diagramas de Funcionamiento. Diseno de Circuitos Por Metodo Anulacion de Senales PermanentesDocumento36 páginas372 Neu Tema 9 Diagramas de Funcionamiento. Diseno de Circuitos Por Metodo Anulacion de Senales PermanentesAntonio MartinezAún no hay calificaciones
- Guía de Laboratorio 1 2016-IDocumento7 páginasGuía de Laboratorio 1 2016-IYesid Fernando EstepaAún no hay calificaciones
- Interruptor de PotenciaDocumento5 páginasInterruptor de PotenciaJhon Alexander Correa MendozaAún no hay calificaciones
- Cadenas de RodillosDocumento25 páginasCadenas de RodillosJhon Alexander Correa MendozaAún no hay calificaciones
- Guia Lab5 E32017 IDocumento2 páginasGuia Lab5 E32017 IJhon Alexander Correa MendozaAún no hay calificaciones
- Act Complementarias U2Documento2 páginasAct Complementarias U2Jhon Alexander Correa MendozaAún no hay calificaciones
- Arranque en Secuencia Forzada Sistema FIDocumento1 páginaArranque en Secuencia Forzada Sistema FIJhon Alexander Correa MendozaAún no hay calificaciones
- Convertidores DC-DC 2017iDocumento54 páginasConvertidores DC-DC 2017iJhon Alexander Correa MendozaAún no hay calificaciones
- .Mercados Verdes.Documento22 páginas.Mercados Verdes.Jhon Alexander Correa MendozaAún no hay calificaciones
- Tablas Ejes y EngranajesDocumento13 páginasTablas Ejes y EngranajesJhon Alexander Correa MendozaAún no hay calificaciones
- Ahorro de CombustiblesDocumento8 páginasAhorro de CombustiblesJhon Alexander Correa MendozaAún no hay calificaciones
- Guía de Laboratorio 1 2016-IDocumento7 páginasGuía de Laboratorio 1 2016-IYesid Fernando EstepaAún no hay calificaciones
- Simbologia Neumatica (Modo de Compatibilidad)Documento13 páginasSimbologia Neumatica (Modo de Compatibilidad)Jhon Alexander Correa MendozaAún no hay calificaciones
- Seminario Motores-Polifasicos-Word El Que EsDocumento9 páginasSeminario Motores-Polifasicos-Word El Que EsJhon Alexander Correa MendozaAún no hay calificaciones
- Cojinetes HamrockDocumento8 páginasCojinetes HamrockJhon Alexander Correa MendozaAún no hay calificaciones
- Mariana Torrico Evaluacion de Conocimiento - q1 DrugtechDocumento2 páginasMariana Torrico Evaluacion de Conocimiento - q1 DrugtechMariana TorricoAún no hay calificaciones
- Recurso de Reposicion CalificacionDocumento9 páginasRecurso de Reposicion CalificacionhernanAún no hay calificaciones
- Activos FijosDocumento41 páginasActivos Fijosdiego calva100% (1)
- Medicion de Nivel de Liquidos y Solidos 1Documento2 páginasMedicion de Nivel de Liquidos y Solidos 1Cristian BalceiroAún no hay calificaciones
- Reactores Químicos y BioquímicoDocumento236 páginasReactores Químicos y Bioquímicomiller100% (3)
- Sesion de Aprendizaje No11Documento5 páginasSesion de Aprendizaje No11Carlos QFAún no hay calificaciones
- 3406C Motor Industrial 6TB09857 Encendido y ApagadoDocumento9 páginas3406C Motor Industrial 6TB09857 Encendido y ApagadoluisferAún no hay calificaciones
- EnsayoDocumento13 páginasEnsayoDeyanira Celeste Goméz VizcainoAún no hay calificaciones
- Formulario RH1 UNIFICADODocumento1 páginaFormulario RH1 UNIFICADOPaula SinisterraAún no hay calificaciones
- Animacion de Punto de VentaDocumento9 páginasAnimacion de Punto de VentaAngie MedalitAún no hay calificaciones
- Tesis - Informe FinalDocumento38 páginasTesis - Informe FinalLina GuzmánAún no hay calificaciones
- Criterios SNP PDFDocumento15 páginasCriterios SNP PDFJuan Carlos García ChávezAún no hay calificaciones
- Monomero Metil MetacrilatoDocumento8 páginasMonomero Metil MetacrilatoBelénAún no hay calificaciones
- Precios Estimados SHCP VehiculosDocumento29 páginasPrecios Estimados SHCP VehiculosgalazlicAún no hay calificaciones
- 360 Grados de Influencia ResumenDocumento6 páginas360 Grados de Influencia Resumenabeta02Aún no hay calificaciones
- Diagrama de Bloques Proyecto FinalDocumento6 páginasDiagrama de Bloques Proyecto Finalsic.correoAún no hay calificaciones
- Guia de Actividades y Rubrica de Evaluacion - Fase 4 - Diagnostico Participativo Contextualizado e Informe PsicologicoDocumento7 páginasGuia de Actividades y Rubrica de Evaluacion - Fase 4 - Diagnostico Participativo Contextualizado e Informe PsicologicoMarly DuarteAún no hay calificaciones
- Planes Gestion Social v4Documento40 páginasPlanes Gestion Social v4Jimmy Zuluaga Barrios100% (1)
- Cuadro Comparativo de Procesadores AMDDocumento7 páginasCuadro Comparativo de Procesadores AMDSaturnino MoralesAún no hay calificaciones
- CAPÍTULO 6 DE LA FISCALÍA GENERAL DE LA NACIÓN Artículo 249Documento9 páginasCAPÍTULO 6 DE LA FISCALÍA GENERAL DE LA NACIÓN Artículo 249miguelAún no hay calificaciones
- Carta de Recomendacion TrabajoDocumento1 páginaCarta de Recomendacion Trabajodennisque7158Aún no hay calificaciones
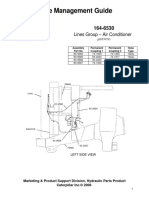
- Hose Management Guide: SN: 2Bw Lines Group - Air ConditionerDocumento69 páginasHose Management Guide: SN: 2Bw Lines Group - Air ConditionerlhAún no hay calificaciones
- Cronograma Actualizado Administración Estratégica D 2020-1 Prof. Roberto Paiva PDFDocumento1 páginaCronograma Actualizado Administración Estratégica D 2020-1 Prof. Roberto Paiva PDFSanchez Salazar Diego MartinAún no hay calificaciones
- 1A. Derecho Registral - Principios RegistralesDocumento66 páginas1A. Derecho Registral - Principios RegistralesElizabeth & FinchAún no hay calificaciones
- Matemáticas - GELO Quantitative Literacy - FinalDocumento7 páginasMatemáticas - GELO Quantitative Literacy - FinalAndrés LimaAún no hay calificaciones
- Evidencia Taller Interpretar Un Estado FinancieroDocumento4 páginasEvidencia Taller Interpretar Un Estado FinancieroJulio César Palomino Pláceres0% (1)
- Libros Seniat 2022Documento3 páginasLibros Seniat 2022Nahum96% (23)
- Mandato Especial Gestiones Posesión EfectivaDocumento4 páginasMandato Especial Gestiones Posesión EfectivaEstefanía Manríquez RoblesAún no hay calificaciones
- Cadena de Mando en La Estructura OrganizacionalDocumento5 páginasCadena de Mando en La Estructura OrganizacionalJoSe VeGaAún no hay calificaciones
- Acumulador (Piloto) - Probar y CargarDocumento13 páginasAcumulador (Piloto) - Probar y CargarWilmer Huingo VargasAún no hay calificaciones