También podría gustarte
- Control automático aplicado: Prácticas de laboratorio 2da. EdiciónDe EverandControl automático aplicado: Prácticas de laboratorio 2da. EdiciónCalificación: 3.5 de 5 estrellas3.5/5 (5)
- Instalación de equipos y elementos de sistemas de automatización industrial. ELEM0311De EverandInstalación de equipos y elementos de sistemas de automatización industrial. ELEM0311Calificación: 2 de 5 estrellas2/5 (1)
- Control de procesos: Sintonía de controladores PID mediante métodos de tanteo, curva de reacción y ganancia límiteDocumento13 páginasControl de procesos: Sintonía de controladores PID mediante métodos de tanteo, curva de reacción y ganancia límiteJhamesBrajhamLauraJoaquin100% (1)
- Controlador PidDocumento33 páginasControlador PidAaron Jimenez Chavez100% (1)
- JIDOKADocumento50 páginasJIDOKALaŭra Santander0% (1)
- Control PID MáquinasDocumento13 páginasControl PID MáquinasDarwin GarciaAún no hay calificaciones
- Instrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108De EverandInstrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108Aún no hay calificaciones
- Controladores PIDDocumento16 páginasControladores PIDrolando quispeAún no hay calificaciones
- Control PID temperatura hornoDocumento4 páginasControl PID temperatura hornoRodrigo Andres Heredia GarcésAún no hay calificaciones
- Infografia de Teoría General de SistemasDocumento2 páginasInfografia de Teoría General de SistemasNatalia Perez100% (2)
- Practica2 PID ModificadoDocumento20 páginasPractica2 PID ModificadoEnrique Romero BlancoAún no hay calificaciones
- Cibernética y AdministraciónDocumento5 páginasCibernética y AdministraciónLeo Leon0% (1)
- Apuntes de Control PidDocumento168 páginasApuntes de Control PidLB Baldeon100% (1)
- Control PID: Conceptos, ventajas y aplicaciones industrialesDocumento16 páginasControl PID: Conceptos, ventajas y aplicaciones industrialesG4Z JorgeFloridoAún no hay calificaciones
- Diseño de controladores PIDDocumento8 páginasDiseño de controladores PIDChuy LopezAún no hay calificaciones
- Controlador Pid para Una BalanzaDocumento5 páginasControlador Pid para Una BalanzaKevin GuerreroAún no hay calificaciones
- PID Opams Proteus 435 Tenicota ChristianDocumento3 páginasPID Opams Proteus 435 Tenicota ChristianKhristian FabricioAún no hay calificaciones
- Controladores PIDDocumento10 páginasControladores PIDCesar Adonis VindelAún no hay calificaciones
- Control PID PrácticoDocumento9 páginasControl PID PrácticoOctavio Alamillo MoctezumaAún no hay calificaciones
- Experiencia 3Documento8 páginasExperiencia 3Ronal HbAún no hay calificaciones
- 3.3 Control ProporcionalDocumento5 páginas3.3 Control ProporcionalCarolina Ramos GonzálezAún no hay calificaciones
- Control de presión PIDDocumento6 páginasControl de presión PIDrr_vlAún no hay calificaciones
- APLICACIONES Pid UltimoDocumento7 páginasAPLICACIONES Pid UltimoSaxobeat Nicolas BartoAún no hay calificaciones
- Practica 5 Sintonía de Los ControladoresDocumento29 páginasPractica 5 Sintonía de Los ControladoresJaneth ReyesAún no hay calificaciones
- Controlador PDocumento9 páginasControlador PYhan Pier HuamánAún no hay calificaciones
- Ensayo de Algoritmo Genético para PIDDocumento18 páginasEnsayo de Algoritmo Genético para PIDJimmy BuenoAún no hay calificaciones
- Pid Por Asignación de PolosDocumento33 páginasPid Por Asignación de PolosDayanna GómezAún no hay calificaciones
- Sist - Control 01T ProyectoFinalDocumento15 páginasSist - Control 01T ProyectoFinalMarcelo Saldarriaga Rivera100% (1)
- Control PidDocumento11 páginasControl PidLuisAlfredoPerezAún no hay calificaciones
- Controlado D T Por PidDocumento7 páginasControlado D T Por PidPaúl García100% (1)
- Sistemas de Control 2Documento11 páginasSistemas de Control 2Boris Sebastian Toapanta JimenezAún no hay calificaciones
- Análisis de los efectos del control PID en sistemasDocumento10 páginasAnálisis de los efectos del control PID en sistemasFrancisco MarinAún no hay calificaciones
- Algoritmos de ControlDocumento50 páginasAlgoritmos de ControlStebhan Sanchez100% (1)
- Examen Final Sheyla-2Documento4 páginasExamen Final Sheyla-2Yaneth QuirozAún no hay calificaciones
- Qué Es Un Controlador PIDDocumento3 páginasQué Es Un Controlador PIDBrandon EscobarAún no hay calificaciones
- Parcial Final INSTRUMENTACIONDocumento2 páginasParcial Final INSTRUMENTACIONIsaac Tapias CerroAún no hay calificaciones
- Practica 08 - Exploracion de Algoritmos de Controles ( - 007Documento4 páginasPractica 08 - Exploracion de Algoritmos de Controles ( - 007Roy Moya HAún no hay calificaciones
- Binp U2 Ea MagpDocumento9 páginasBinp U2 Ea MagpAngeles GrajalesAún no hay calificaciones
- Fundamentos de Control de Procesos Industriales .PDF Control - IDocumento17 páginasFundamentos de Control de Procesos Industriales .PDF Control - IRonaldo PirloAún no hay calificaciones
- Control PIDDocumento6 páginasControl PIDFrânçïsçô DâvïdAún no hay calificaciones
- Control 1Documento20 páginasControl 1Alan Del PalacioAún no hay calificaciones
- CDI-Edwin FerneyDocumento23 páginasCDI-Edwin FerneyYAFETH WILSON RAMOS CRUZAún no hay calificaciones
- Reporte PidDocumento17 páginasReporte PidMackflay JCAún no hay calificaciones
- Reporte de Sistema PID PDFDocumento8 páginasReporte de Sistema PID PDFJose Juan MoralesAún no hay calificaciones
- Sintonización de controladores PID en MATLABDocumento18 páginasSintonización de controladores PID en MATLABMizraim Alonso Chura MonroyAún no hay calificaciones
- Controladores PID Discretos-0Documento17 páginasControladores PID Discretos-0Alejandro BussanoAún no hay calificaciones
- Control Pid Proyecto FinalDocumento4 páginasControl Pid Proyecto Finaljesus daniel amaya vergaraAún no hay calificaciones
- Avr221 Control Pid DiscretoDocumento8 páginasAvr221 Control Pid DiscretoCokis Hdez SAún no hay calificaciones
- Sesion 10 Control Autom Tico de Procesos - 2Documento25 páginasSesion 10 Control Autom Tico de Procesos - 2yacilaloayzapriscilaAún no hay calificaciones
- PRACTICA LAB DE CONTROL PI SISTEMA DE RIEGO (Caudal)Documento2 páginasPRACTICA LAB DE CONTROL PI SISTEMA DE RIEGO (Caudal)fmurallassanchezAún no hay calificaciones
- Descripcion de Un Controlador PidDocumento1 páginaDescripcion de Un Controlador PidbryanAún no hay calificaciones
- Practica 2_ Determinación de los puntos de control en el equipo proceso (sintonización PID)_Rojo_EscobDocumento10 páginasPractica 2_ Determinación de los puntos de control en el equipo proceso (sintonización PID)_Rojo_Escobxhmv6ygt4hAún no hay calificaciones
- Análisis de sistemas dinámicos con controladores PIDDocumento9 páginasAnálisis de sistemas dinámicos con controladores PIDOscar BonillaAún no hay calificaciones
- Desarrollo de Una Herramienta en Matlab paraDocumento23 páginasDesarrollo de Una Herramienta en Matlab paraFernando RuizAún no hay calificaciones
- Captura de Pantalla 2023-04-21 A La(s) 16.19.45Documento22 páginasCaptura de Pantalla 2023-04-21 A La(s) 16.19.45Victor JuarezAún no hay calificaciones
- 33 Control IiDocumento14 páginas33 Control IiPt farrgiAún no hay calificaciones
- Diseño Del Controlador PIDDocumento37 páginasDiseño Del Controlador PIDBilly ElliotAún no hay calificaciones
- 08 - Sistemas de Control I - ContenidosDocumento28 páginas08 - Sistemas de Control I - ContenidosjackAún no hay calificaciones
- Laboratorio 10 Parte 3Documento12 páginasLaboratorio 10 Parte 3Yanira ChambillaAún no hay calificaciones
- Final 5 Solo Falta DanielDocumento7 páginasFinal 5 Solo Falta DanielMarcos CnAún no hay calificaciones
- Control PID Labview Motor DCDocumento10 páginasControl PID Labview Motor DCWalter Mamani CcasaAún no hay calificaciones
- Evaluación Del Desempeño de Los Controladores Pid y Retroalimentación de Estados Lineal para Un Sistema de Control de TemperaturaDocumento6 páginasEvaluación Del Desempeño de Los Controladores Pid y Retroalimentación de Estados Lineal para Un Sistema de Control de TemperaturaDomus InteligenteAún no hay calificaciones
- Control PID: Definición, Partes y EjemplosDocumento8 páginasControl PID: Definición, Partes y Ejemplosjulio durandAún no hay calificaciones
- Control PID DiscretoDocumento12 páginasControl PID Discretorolando ojedaAún no hay calificaciones
- Unidad 1,2,3 Original Manteniiento GeneralDocumento37 páginasUnidad 1,2,3 Original Manteniiento GeneralalejandroAún no hay calificaciones
- Casa CalidadDocumento19 páginasCasa CalidadNEFI DANIEL OLAYA ZAVALETAAún no hay calificaciones
- Sistemas Avanzados de Manufactura PDFDocumento5 páginasSistemas Avanzados de Manufactura PDFWinchester ZYXAún no hay calificaciones
- Triptico CytDocumento2 páginasTriptico Cytveronica sinarahua villacortaAún no hay calificaciones
- Modelos y patrones del proceso de softwareDocumento1 páginaModelos y patrones del proceso de softwareAntonio ReinosoAún no hay calificaciones
- Red Neuronal KohonenDocumento12 páginasRed Neuronal Kohonencarlos leonardo adames camargoAún no hay calificaciones
- Sesión de Lectura 3ra Sem 6ta ExpDocumento5 páginasSesión de Lectura 3ra Sem 6ta ExpMaria Luisa Beyzaga CandiottiAún no hay calificaciones
- Estudio de colas en Burger KingDocumento31 páginasEstudio de colas en Burger KingLuisEnriqueCamacSaavedraAún no hay calificaciones
- ACTIVIDAD 1 COMUNICACIÓN LEEMOS UNA INFOGRAFÍA CULTURA E HISTORIA DEL PERÚ EXPERIENCIA 5 3ero 2023Documento8 páginasACTIVIDAD 1 COMUNICACIÓN LEEMOS UNA INFOGRAFÍA CULTURA E HISTORIA DEL PERÚ EXPERIENCIA 5 3ero 2023Adi FerAún no hay calificaciones
- Recoger y entregar carga según rutasDocumento3 páginasRecoger y entregar carga según rutasSandra Ximena Franco MejiaAún no hay calificaciones
- AMLSDocumento191 páginasAMLSAlex AlvarezAún no hay calificaciones
- Business Process Management (BPM)Documento43 páginasBusiness Process Management (BPM)Daniel Jaimes PalaciosAún no hay calificaciones
- Informe Sistemas de Control 4Documento15 páginasInforme Sistemas de Control 4Gamer AllianceAún no hay calificaciones
- Programaarq2019 10 JDocumento5 páginasProgramaarq2019 10 Jpablo nunezAún no hay calificaciones
- Moray-Tech SCADA - Redes Industriales PDFDocumento4 páginasMoray-Tech SCADA - Redes Industriales PDFEnver Espinal SantosAún no hay calificaciones
- Organigrama CalidadDocumento1 páginaOrganigrama Calidadjovanna fernizaAún no hay calificaciones
- Gestión de proyectos SIDocumento11 páginasGestión de proyectos SIPao Mishi LebaronAún no hay calificaciones
- El Proceso-09Documento46 páginasEl Proceso-09Leonel Soria CortesAún no hay calificaciones
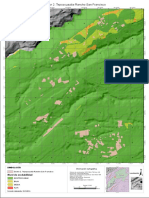
- Sector Tepozcuautla-Rancho San Francisco ErosiónDocumento1 páginaSector Tepozcuautla-Rancho San Francisco ErosiónoscarinAún no hay calificaciones
- Cuadro Comparativo "Tecnologías de La Información y La Comunicación"Documento12 páginasCuadro Comparativo "Tecnologías de La Información y La Comunicación"Monica Yulieth Rodriguez AceroAún no hay calificaciones
- Taller IODocumento14 páginasTaller IOAngie TejadaAún no hay calificaciones
- Modelo de Respuesta de La Materia Introduccion A La Inteligencia Artificial y Sistemas ExpertosDocumento4 páginasModelo de Respuesta de La Materia Introduccion A La Inteligencia Artificial y Sistemas Expertosjp304Aún no hay calificaciones
- GRAFCET diseño autómatasDocumento29 páginasGRAFCET diseño autómatasEspinoza EstebanAún no hay calificaciones
- Acta socialización agenda CAP e identificación necesidades aprendizajeDocumento3 páginasActa socialización agenda CAP e identificación necesidades aprendizajeJesus AbregoAún no hay calificaciones
- Examen Final - Semana 8 BPM 120de120Documento13 páginasExamen Final - Semana 8 BPM 120de120Milton Daniel Capera Rivera50% (2)
- Lab de Control - 2do Informe FinalDocumento10 páginasLab de Control - 2do Informe FinalIVAN ALONSO CCAHUACHIA LETONAAún no hay calificaciones