También podría gustarte
- Tarea - 4 - Componente Practico - Eider EstradaDocumento9 páginasTarea - 4 - Componente Practico - Eider Estradaandres villa100% (2)
- Tarea - 4 - Componente Practico - Eider EstradaDocumento9 páginasTarea - 4 - Componente Practico - Eider Estradaandres villaAún no hay calificaciones
- El Robot Lego EV3Documento79 páginasEl Robot Lego EV3Giovanni CardozoAún no hay calificaciones
- TesisDocumento96 páginasTesisalberto luis acosta burgosAún no hay calificaciones
- Reseña de Epistemología de Mario BungeDocumento9 páginasReseña de Epistemología de Mario BungeLuisAún no hay calificaciones
- Presentacion 3 VirtualDocumento43 páginasPresentacion 3 VirtualElvis RafaelAún no hay calificaciones
- Robotica Modulo 4Documento14 páginasRobotica Modulo 4alberto luis acosta burgosAún no hay calificaciones
- InformacionDocumento8 páginasInformacionJOSEAún no hay calificaciones
- El Robot Lego EV3Documento8 páginasEl Robot Lego EV3Palomino Rosales John SmithAún no hay calificaciones
- Robotica EV3Documento52 páginasRobotica EV3Mariluz Cuayla100% (1)
- Presentacion Ultima ClaseDocumento50 páginasPresentacion Ultima ClaseMarcos Fernando Ramírez MateoAún no hay calificaciones
- Presentacion Solución de ProblemasDocumento9 páginasPresentacion Solución de ProblemasJavier ParodiAún no hay calificaciones
- Presentacion Modulo 8 (7-5-22)Documento44 páginasPresentacion Modulo 8 (7-5-22)Marcos Fernando Ramírez MateoAún no hay calificaciones
- Robotica Ev3Documento34 páginasRobotica Ev3Roland JayAún no hay calificaciones
- Formación Ev3Documento22 páginasFormación Ev3Rafa S.C.Aún no hay calificaciones
- Formato de Informe IndividualDocumento9 páginasFormato de Informe IndividualJuan Diego Ospina PeñaAún no hay calificaciones
- Hoja de Trabajo de Robótica-15-05-1Documento2 páginasHoja de Trabajo de Robótica-15-05-1Jose Javier MazariegosAún no hay calificaciones
- Tarea4 Comonente-Practico Jairson ThomasDocumento8 páginasTarea4 Comonente-Practico Jairson ThomasjairsonAún no hay calificaciones
- Sesion 5 FADocumento43 páginasSesion 5 FAmaick Gómez EspinozaAún no hay calificaciones
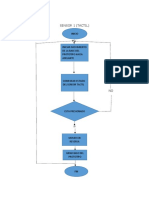
- Diagramas de Flujo de Sensores LegoDocumento3 páginasDiagramas de Flujo de Sensores LegoJaime Adonis Duran RoperoAún no hay calificaciones
- Manual Moway Por Jorge CruzDocumento16 páginasManual Moway Por Jorge CruzInnovacionProfesionalAún no hay calificaciones
- Tarea 1Documento6 páginasTarea 1GeovannyAún no hay calificaciones
- Sistema Robitico ModuloDocumento12 páginasSistema Robitico ModuloNicolle RipamonteAún no hay calificaciones
- Tarea 2 Sesores PDFDocumento8 páginasTarea 2 Sesores PDFDaniel Bustos ParadaAún no hay calificaciones
- El Robot Lego Ev3 PartesDocumento12 páginasEl Robot Lego Ev3 PartesRoylan GarciaAún no hay calificaciones
- El Robot Lego Ev3 PartesDocumento12 páginasEl Robot Lego Ev3 PartesAndrea Mejias GomezAún no hay calificaciones
- Percepción y Visión RobóticaDocumento37 páginasPercepción y Visión Robóticawolf1922100% (1)
- EV3 - 1guía Del Facilitador ResumidaDocumento71 páginasEV3 - 1guía Del Facilitador ResumidaRafa S.C.Aún no hay calificaciones
- Universidad Nacional Abierta y A DistanciaDocumento9 páginasUniversidad Nacional Abierta y A DistanciaALEXANDER LOPEZAún no hay calificaciones
- VinculaciónEPN SensorUlFotoceldaDocumento33 páginasVinculaciónEPN SensorUlFotoceldaLeonardo AmayaAún no hay calificaciones
- Sensores Electricos y ElectronicosDocumento8 páginasSensores Electricos y ElectronicosfranklinivanAún no hay calificaciones
- Tarea4 Componente-Practico Jaime CampazDocumento9 páginasTarea4 Componente-Practico Jaime CampazJaime CampazAún no hay calificaciones
- MiniRobótica para Adolescentes GuíaDocumento17 páginasMiniRobótica para Adolescentes GuíaAngel VargasAún no hay calificaciones
- Tipos de SensoresDocumento11 páginasTipos de Sensoresandresnfs20Aún no hay calificaciones
- Presentacion Alfredo 1Documento29 páginasPresentacion Alfredo 1eyfvhfyAún no hay calificaciones
- Actividad Semana 2 Aplicacion de Los Sensores en La IndustriaDocumento8 páginasActividad Semana 2 Aplicacion de Los Sensores en La IndustriaByron Diiaz ObandoAún no hay calificaciones
- Sistemas Electricos y AutomaticosDocumento29 páginasSistemas Electricos y Automaticosluigi portaAún no hay calificaciones
- 2 - SensoresDocumento11 páginas2 - SensoresFedeAún no hay calificaciones
- Investigacion OpticoDocumento6 páginasInvestigacion OpticoJorge DiazAún no hay calificaciones
- Sensores ProximidadDocumento4 páginasSensores ProximidadRodrigo DiwkaAún no hay calificaciones
- Proyecto Arduino123Documento11 páginasProyecto Arduino123Iam SpidermanAún no hay calificaciones
- Manual EV3Documento45 páginasManual EV3Dixon Collantes G67% (3)
- Sensores Posición, SonidoDocumento35 páginasSensores Posición, SonidoDanny Çedeño CscAún no hay calificaciones
- Lectura TécnicaDocumento18 páginasLectura TécnicaChente01 ATAún no hay calificaciones
- 1.-Transductores y Tipos de SensoresDocumento8 páginas1.-Transductores y Tipos de Sensoresfrancisco amadorAún no hay calificaciones
- EV3 Funciones-Nombres-CaracteristicasDocumento17 páginasEV3 Funciones-Nombres-CaracteristicasjenniferAún no hay calificaciones
- MD - T3.3.1 Tipos de SensoresDocumento4 páginasMD - T3.3.1 Tipos de SensoresVictor HernandezAún no hay calificaciones
- Detector de Humedad para Plantas y Otras UtilidadesDocumento15 páginasDetector de Humedad para Plantas y Otras UtilidadesChriistianRDresdnerAún no hay calificaciones
- Sensores y Transductores de MovimientoDocumento50 páginasSensores y Transductores de MovimientoRobineyAún no hay calificaciones
- SensoresDocumento11 páginasSensoresMaria Francisca MombergAún no hay calificaciones
- Sensores y Activadores ExpoDocumento15 páginasSensores y Activadores ExpoEnrique Albarracín EstupiñanAún no hay calificaciones
- 212020-Informe de Laboratorios Simuladosyeisson PeñaDocumento21 páginas212020-Informe de Laboratorios Simuladosyeisson PeñaYolanda cardenasAún no hay calificaciones
- SensoresDocumento12 páginasSensoresRubén Darío Cárdenas EspinosaAún no hay calificaciones
- Robotita Ev3Documento9 páginasRobotita Ev3Viviana Pardo OsorioAún no hay calificaciones
- Tipos de SensoresDocumento32 páginasTipos de Sensoreskemberly oviedoAún no hay calificaciones
- Ultrasonic PDFDocumento11 páginasUltrasonic PDFHugo BáezAún no hay calificaciones
- Guia Definitiva de Osciloscopio PDFDocumento27 páginasGuia Definitiva de Osciloscopio PDFAlonsooReyes100% (4)
- Sensores para RobóticaDocumento15 páginasSensores para RobóticaCAMARGO GONZALEZ ERASMO JESUS INGENIER�A EL�CTRICAAún no hay calificaciones
- Presentacion LogoDocumento11 páginasPresentacion Logomaria antonia arboledaAún no hay calificaciones
- SensoresDocumento4 páginasSensoresctmrrwyqknAún no hay calificaciones
- SensoresDocumento6 páginasSensoresVidarte Rodriguez Alberto LeonelAún no hay calificaciones
- Fotografía básica: Guía de bolsillo (Basic Photography: Pocket Guide): Fundamentos de la exposición, ajustes de cámara, información sobre el objetivo, consejos clave de composición y escenarios fotográficos (Exposure Basics, Camera Settings, Lens Info, Compositiong Tips, and Shooting Scenarios)De EverandFotografía básica: Guía de bolsillo (Basic Photography: Pocket Guide): Fundamentos de la exposición, ajustes de cámara, información sobre el objetivo, consejos clave de composición y escenarios fotográficos (Exposure Basics, Camera Settings, Lens Info, Compositiong Tips, and Shooting Scenarios)Aún no hay calificaciones
- Tesis de Maestría para Optar Por El Titulo de Maestría en Psicología EscolarDocumento96 páginasTesis de Maestría para Optar Por El Titulo de Maestría en Psicología Escolaralberto luis acosta burgos100% (1)
- 4.2 Actividad de Aprendizaje - Alberto Luis Acosta BurgosDocumento3 páginas4.2 Actividad de Aprendizaje - Alberto Luis Acosta Burgosalberto luis acosta burgosAún no hay calificaciones
- Tesis Liseily Martinez Completa para Examina 24 06 2022Documento103 páginasTesis Liseily Martinez Completa para Examina 24 06 2022alberto luis acosta burgosAún no hay calificaciones
- Actividad Integradora Con Robótica Educativa - 5Documento31 páginasActividad Integradora Con Robótica Educativa - 5alberto luis acosta burgosAún no hay calificaciones
- Capacitacion de Robotica Educativa 3Documento60 páginasCapacitacion de Robotica Educativa 3alberto luis acosta burgosAún no hay calificaciones
- Capacitacion de Robotica Educativa 2Documento40 páginasCapacitacion de Robotica Educativa 2alberto luis acosta burgosAún no hay calificaciones
- Capacitacion Robotica Educativa 1Documento58 páginasCapacitacion Robotica Educativa 1alberto luis acosta burgosAún no hay calificaciones
- Cohete HidrodinamicoDocumento18 páginasCohete HidrodinamicoKeyla KhonsAún no hay calificaciones
- Escuela de Turismo y Gastronomía (MATEMATICAS)Documento10 páginasEscuela de Turismo y Gastronomía (MATEMATICAS)agente vargas jtnAún no hay calificaciones
- Dinamica Jesus Correa AyalaDocumento11 páginasDinamica Jesus Correa AyalaJesús CorreaAún no hay calificaciones
- SESION 14B. Energía Mecánica de Rotación.Documento18 páginasSESION 14B. Energía Mecánica de Rotación.Marie GarciaAún no hay calificaciones
- LEYES DE LA COMBINACION QUIMICAaDocumento7 páginasLEYES DE LA COMBINACION QUIMICAaDenilson ChamayaAún no hay calificaciones
- REACTIVO Fisica GeneralDocumento30 páginasREACTIVO Fisica GeneralKevin Pachacama0% (1)
- Destilacion FraccionadaDocumento71 páginasDestilacion FraccionadaChenito Romero FloresAún no hay calificaciones
- Informe Final-Simetria ComplementariaDocumento11 páginasInforme Final-Simetria ComplementariaAngel LaurelAún no hay calificaciones
- Presentación de MareasDocumento13 páginasPresentación de MareasMirka delgadoAún no hay calificaciones
- Practica 3 (Electrostática)Documento16 páginasPractica 3 (Electrostática)Arturo YosepAún no hay calificaciones
- Ecualizador 2.0Documento6 páginasEcualizador 2.0Khrizz FleuriAún no hay calificaciones
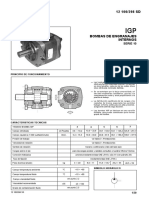
- BombaDocumento20 páginasBombaMalco BaldovinoAún no hay calificaciones
- Absorcion ReactivaDocumento23 páginasAbsorcion ReactivaHeidi Meneses Olivo0% (1)
- Empuje Dinámico de Una Esfera en CaídaDocumento13 páginasEmpuje Dinámico de Una Esfera en CaídaLuis CarhuanchoAún no hay calificaciones
- Cap8 Hidroest pp272 310 2008Documento39 páginasCap8 Hidroest pp272 310 2008Yury Lenin RamirezAún no hay calificaciones
- Trabajo Fisica 1Documento14 páginasTrabajo Fisica 1Anthony Jose Cevallos PoloAún no hay calificaciones
- Facultad de Ingeniería Area Mecánica Y ElectricaDocumento3 páginasFacultad de Ingeniería Area Mecánica Y ElectricasaimsboyAún no hay calificaciones
- Temario de Quimica - 2023 NSDocumento4 páginasTemario de Quimica - 2023 NSLuis Humberto Armas RendónAún no hay calificaciones
- Trabajo UnoDocumento28 páginasTrabajo UnoLuis Feliciano CardenasAún no hay calificaciones
- Capítulo 18. La Electricidad y Los Incendios en Instalaciones Eléctricas-1Documento12 páginasCapítulo 18. La Electricidad y Los Incendios en Instalaciones Eléctricas-1CaparachinPalpaPedroAún no hay calificaciones
- Guia de Movimiento Uniforme AceleradoDocumento6 páginasGuia de Movimiento Uniforme AceleradoYeison PedrazaAún no hay calificaciones
- Ejercicios Unidad 2 CaixbaDocumento6 páginasEjercicios Unidad 2 CaixbaedgarAún no hay calificaciones
- Ejercicios Practicos PDFDocumento13 páginasEjercicios Practicos PDFJulio Andres Jacome Borges100% (1)
- Transmisión de PotenciaDocumento7 páginasTransmisión de PotenciaRmn JcboAún no hay calificaciones
- Flujo de FluidosDocumento11 páginasFlujo de FluidosAshley SmithAún no hay calificaciones
- Ondas ElectromangenticasDocumento2 páginasOndas ElectromangenticasChristians David Farfán TipianaAún no hay calificaciones
- Diseño de La Terminación de PozosDocumento26 páginasDiseño de La Terminación de PozosOsvaldo Luna HdzAún no hay calificaciones
- Proyección Social 2022 (UNAJ)Documento65 páginasProyección Social 2022 (UNAJ)Wilson ClementeAún no hay calificaciones
- Teoría Mecánica de Fluidos UCA 1Documento68 páginasTeoría Mecánica de Fluidos UCA 1josemiyugiAún no hay calificaciones