También podría gustarte
- Fotografía básica: Guía de bolsillo (Basic Photography: Pocket Guide): Fundamentos de la exposición, ajustes de cámara, información sobre el objetivo, consejos clave de composición y escenarios fotográficos (Exposure Basics, Camera Settings, Lens Info, Compositiong Tips, and Shooting Scenarios)De EverandFotografía básica: Guía de bolsillo (Basic Photography: Pocket Guide): Fundamentos de la exposición, ajustes de cámara, información sobre el objetivo, consejos clave de composición y escenarios fotográficos (Exposure Basics, Camera Settings, Lens Info, Compositiong Tips, and Shooting Scenarios)Aún no hay calificaciones
- Robotica EV3Documento52 páginasRobotica EV3Mariluz Cuayla100% (1)
- El Robot Lego EV3Documento8 páginasEl Robot Lego EV3Palomino Rosales John SmithAún no hay calificaciones
- Lego EV3, robot educativoDocumento8 páginasLego EV3, robot educativoJOSEAún no hay calificaciones
- Manual EV3Documento45 páginasManual EV3Dixon Collantes G67% (3)
- El Robot Lego EV3Documento79 páginasEl Robot Lego EV3Giovanni CardozoAún no hay calificaciones
- Formación Ev3Documento22 páginasFormación Ev3Rafa S.C.Aún no hay calificaciones
- El Robot Lego Ev3 PartesDocumento12 páginasEl Robot Lego Ev3 PartesRoylan GarciaAún no hay calificaciones
- Robot Lego EV3: Construye y Programa tu Propio RobotDocumento12 páginasRobot Lego EV3: Construye y Programa tu Propio RobotAndrea Mejias GomezAún no hay calificaciones
- Capacitacion de Robotica Educativa 4Documento28 páginasCapacitacion de Robotica Educativa 4alberto luis acosta burgosAún no hay calificaciones
- Robotica Modulo 4Documento14 páginasRobotica Modulo 4alberto luis acosta burgosAún no hay calificaciones
- Presentacion Ultima ClaseDocumento50 páginasPresentacion Ultima ClaseMarcos Fernando Ramírez MateoAún no hay calificaciones
- FUNDAMENTOS ARDUINODocumento43 páginasFUNDAMENTOS ARDUINOmaick Gómez EspinozaAún no hay calificaciones
- Presentacion 3 VirtualDocumento43 páginasPresentacion 3 VirtualElvis RafaelAún no hay calificaciones
- Hoja de Trabajo de Robótica-15-05-1Documento2 páginasHoja de Trabajo de Robótica-15-05-1Jose Javier MazariegosAún no hay calificaciones
- Presentacion Modulo 8 (7-5-22)Documento44 páginasPresentacion Modulo 8 (7-5-22)Marcos Fernando Ramírez MateoAún no hay calificaciones
- Sensores ArduinoDocumento14 páginasSensores ArduinoQuian2Aún no hay calificaciones
- Sensor Ultrasónico HCDocumento5 páginasSensor Ultrasónico HCJuan de Dios Gómez GutiérrezAún no hay calificaciones
- Simulación LEGO para solución de 3 misiones mediante sensores y programaciónDocumento9 páginasSimulación LEGO para solución de 3 misiones mediante sensores y programaciónJavier ParodiAún no hay calificaciones
- EV3 - 1guía Del Facilitador ResumidaDocumento71 páginasEV3 - 1guía Del Facilitador ResumidaRafa S.C.Aún no hay calificaciones
- 1.-Transductores y Tipos de SensoresDocumento8 páginas1.-Transductores y Tipos de Sensoresfrancisco amadorAún no hay calificaciones
- Tarea4 Comonente-Practico Jairson ThomasDocumento8 páginasTarea4 Comonente-Practico Jairson ThomasjairsonAún no hay calificaciones
- Clases 5 - W-1Documento20 páginasClases 5 - W-1bryan eduardo villegas carrascoAún no hay calificaciones
- Proyecto Arduino123Documento11 páginasProyecto Arduino123Iam SpidermanAún no hay calificaciones
- Sensor Ultrasonico Hc-sr04Documento21 páginasSensor Ultrasonico Hc-sr04W Alvarado GutierrezAún no hay calificaciones
- EV3 Funciones-Nombres-CaracteristicasDocumento17 páginasEV3 Funciones-Nombres-CaracteristicasjenniferAún no hay calificaciones
- Taller de Lego MindstormsDocumento18 páginasTaller de Lego MindstormsFrancisco Silva CruzAún no hay calificaciones
- Sensores: Tipos y CaracterísticasDocumento10 páginasSensores: Tipos y CaracterísticasKatherine PintoAún no hay calificaciones
- Sensores robot IIDocumento8 páginasSensores robot IIfranklinivanAún no hay calificaciones
- Sensores Para RobóticaDocumento15 páginasSensores Para RobóticaCAMARGO GONZALEZ ERASMO JESUS INGENIER�A EL�CTRICAAún no hay calificaciones
- Manual Moway Por Jorge CruzDocumento16 páginasManual Moway Por Jorge CruzInnovacionProfesionalAún no hay calificaciones
- Formato de Informe IndividualDocumento9 páginasFormato de Informe IndividualJuan Diego Ospina PeñaAún no hay calificaciones
- ComponentesDocumento6 páginasComponentesedwAún no hay calificaciones
- Mapa Conceptual Sobre SensoresDocumento13 páginasMapa Conceptual Sobre SensoresSAMANTHA LOPEZ MONTALVOAún no hay calificaciones
- Resumen de Sensores InfrarrojosDocumento6 páginasResumen de Sensores InfrarrojosJosé Luis CerrudAún no hay calificaciones
- Exposicion Tema 3 Sensores-2Documento67 páginasExposicion Tema 3 Sensores-2JovanyBenitezSifuentesAún no hay calificaciones
- MiniRobótica para Adolescentes GuíaDocumento17 páginasMiniRobótica para Adolescentes GuíaAngel VargasAún no hay calificaciones
- Circuitos Y Sistemas Electrónicos: CursoDocumento19 páginasCircuitos Y Sistemas Electrónicos: CursoAlexis Ychpas VelasquezAún no hay calificaciones
- Robótica - Sensores de Luz, Sonido, Infrarrojo, Otros.Documento17 páginasRobótica - Sensores de Luz, Sonido, Infrarrojo, Otros.colombomendozacarolinaAún no hay calificaciones
- Concepto SensoresDocumento12 páginasConcepto SensoresCarlos ArevaloAún no hay calificaciones
- 1a Unidad. Sensores - DiapositivasDocumento112 páginas1a Unidad. Sensores - DiapositivasJuvenal RasgadoAún no hay calificaciones
- Trabajo Autonomo de Herramientas de Uso AutomotrizDocumento10 páginasTrabajo Autonomo de Herramientas de Uso AutomotrizMarcos TenensarayAún no hay calificaciones
- Sensores ElectronicosDocumento17 páginasSensores ElectronicosEINER WILLIAM ALA BALTZARAún no hay calificaciones
- Sensores Con ArduinoDocumento6 páginasSensores Con ArduinoJhonnMk C SayreAún no hay calificaciones
- 10 Intro Mecatrónica - SensoresDocumento36 páginas10 Intro Mecatrónica - SensoresChristopher Tomalá DrewAún no hay calificaciones
- Tarea 02 Cuadro ComparativoDocumento14 páginasTarea 02 Cuadro ComparativoSAMANTHA LOPEZ MONTALVOAún no hay calificaciones
- Sensores FotoeléctricosDocumento11 páginasSensores FotoeléctricosHángel PérezAún no hay calificaciones
- Dere Utn-Frt U2 Clase 6Documento20 páginasDere Utn-Frt U2 Clase 6Angel G. GomezAún no hay calificaciones
- ContenidoDocumento14 páginasContenidoTomás Moreno100% (1)
- Sensor Movimiento AutomatizadoDocumento4 páginasSensor Movimiento AutomatizadoRubensinhoGamarraBarreraAún no hay calificaciones
- Tema 6Documento15 páginasTema 6BellAún no hay calificaciones
- Tipos de SensoresDocumento32 páginasTipos de Sensoreskemberly oviedoAún no hay calificaciones
- Robotica Industrial SENSORES ExposicionDocumento55 páginasRobotica Industrial SENSORES ExposicionFernando AtalayaAún no hay calificaciones
- Material Didactico 1.1 Sensor OpticoDocumento3 páginasMaterial Didactico 1.1 Sensor OpticoAlejandro VazquezAún no hay calificaciones
- Sensores para Lego NXTDocumento8 páginasSensores para Lego NXTScott SommersAún no hay calificaciones
- Diseño Casa InteligenteDocumento13 páginasDiseño Casa InteligenteKarlos PCAún no hay calificaciones
- Tarea 6 SensoresDocumento13 páginasTarea 6 SensoresCARLOS HIRAM ESTEVEZ CASTROAún no hay calificaciones
- Sensor Rotacion PDFDocumento4 páginasSensor Rotacion PDFFranco ValledorAún no hay calificaciones
- 212020-Informe de Laboratorios Simuladosyeisson PeñaDocumento21 páginas212020-Informe de Laboratorios Simuladosyeisson PeñaYolanda cardenasAún no hay calificaciones
- Tipos de Señales AutomotricesDocumento6 páginasTipos de Señales AutomotricesKarla Te Amo te AmoAún no hay calificaciones
- ELECTRICIDAD SimbolosDocumento7 páginasELECTRICIDAD SimbolosJorge del Toro100% (1)
- CNB - Área - de - Ciencias - Sociales - Ciclo - BásicoDocumento31 páginasCNB - Área - de - Ciencias - Sociales - Ciclo - BásicoRoland JayAún no hay calificaciones
- Cnb. Bach Con Orientación en TurismoDocumento232 páginasCnb. Bach Con Orientación en Turismonenaveliz100% (3)
- Maquinas CC PDFDocumento72 páginasMaquinas CC PDFeduran28071993Aún no hay calificaciones
- CNB - Área - de - Ciencias - Naturales - Ciclo - BásicoDocumento41 páginasCNB - Área - de - Ciencias - Naturales - Ciclo - BásicoRoland JayAún no hay calificaciones
- CNB Perito en Electricidad Industrial PDFDocumento328 páginasCNB Perito en Electricidad Industrial PDFRobert Quino50% (2)
- 5 CNB CCLL ComputacionDocumento232 páginas5 CNB CCLL ComputacionTony AngelAún no hay calificaciones
- Conexion de Motor MonofasicoDocumento3 páginasConexion de Motor MonofasicoRoland JayAún no hay calificaciones
- Unidad9 Recurso1Documento1 páginaUnidad9 Recurso1Roland JayAún no hay calificaciones
- Tarea Par Dibujo TecnicoDocumento3 páginasTarea Par Dibujo TecnicoRoland JayAún no hay calificaciones
- Unidad7 Recurso1Documento1 páginaUnidad7 Recurso1Roland JayAún no hay calificaciones
- Color de Terminales Del Motor Monofásico de Fase PartidaDocumento3 páginasColor de Terminales Del Motor Monofásico de Fase PartidaRoland JayAún no hay calificaciones
- Instalaciones EléctricasDocumento7 páginasInstalaciones EléctricasRoland JayAún no hay calificaciones
- Conexion de Accesorios ElectricosDocumento7 páginasConexion de Accesorios ElectricosRoland JayAún no hay calificaciones
- Taller de Proyecto Arquitectonico IIDocumento126 páginasTaller de Proyecto Arquitectonico IIAntonio Gonzales Cueva100% (1)
- Guía para Nuevo UsuarioDocumento16 páginasGuía para Nuevo UsuarioELMER JUAREZAún no hay calificaciones
- Unidad4 Recurso1Documento1 páginaUnidad4 Recurso1Roland JayAún no hay calificaciones
- Unidad3 Recurso1Documento1 páginaUnidad3 Recurso1Roland JayAún no hay calificaciones
- Manual 25 Maestro ElectricoDocumento40 páginasManual 25 Maestro ElectricoMauricioAún no hay calificaciones
- Unidad3 Recurso1Documento1 páginaUnidad3 Recurso1Roland JayAún no hay calificaciones
- MBP Industria AvicolaDocumento60 páginasMBP Industria AvicolaJavier MoralesAún no hay calificaciones
- Basic Line FollowerDocumento17 páginasBasic Line FollowerHernandez JuanAún no hay calificaciones
- Eglamentación para La Ejecución de Instalaciones Eléctricas en Inmuebles Puesta A Tierra IngDocumento5 páginasEglamentación para La Ejecución de Instalaciones Eléctricas en Inmuebles Puesta A Tierra IngRoland JayAún no hay calificaciones
- Qué Es Un ServomotorDocumento6 páginasQué Es Un ServomotorRoland JayAún no hay calificaciones
- Modulo I ConceptosDocumento1 páginaModulo I ConceptosRoland JayAún no hay calificaciones
- Simatic s7 1500Documento3 páginasSimatic s7 1500Roland JayAún no hay calificaciones
- Robótica Ev3 Lecciones. Modulo Sensor de ColorDocumento9 páginasRobótica Ev3 Lecciones. Modulo Sensor de ColorEmulsión De ScottAún no hay calificaciones
- Ica ProgramadaDocumento14 páginasIca ProgramadaRoland JayAún no hay calificaciones
- Controladores Lógicos ProgramablesDocumento22 páginasControladores Lógicos Programablesmiguel_cm_11Aún no hay calificaciones
- Interpretación de ResultadosDocumento2 páginasInterpretación de ResultadosaиDıı яaMiяeẕAún no hay calificaciones
- Manual de Normas Diseno Interior Buses PDFDocumento74 páginasManual de Normas Diseno Interior Buses PDFMATIASAún no hay calificaciones
- Fisica MruDocumento6 páginasFisica MruAna Paula Mendoza MontesdeocaAún no hay calificaciones
- Historia de La Psicologia 2009-IIDocumento17 páginasHistoria de La Psicologia 2009-IIPsicoCCFFAún no hay calificaciones
- Unidad 3Documento9 páginasUnidad 3Danny Ciau CanulAún no hay calificaciones
- 20 Preguntas Sobre Los Alimentos Geneticamente ModificadosDocumento17 páginas20 Preguntas Sobre Los Alimentos Geneticamente Modificadosca.pachecokarinaAún no hay calificaciones
- Enfermer I ADocumento9 páginasEnfermer I ANancy RodriguezAún no hay calificaciones
- Guía # 1 Introducción Al Estudio de La ÉticaDocumento15 páginasGuía # 1 Introducción Al Estudio de La Éticairma Areli GalloAún no hay calificaciones
- Prácticas de ElectrotecniaDocumento4 páginasPrácticas de ElectrotecniaYobany Alvarez VelasquezAún no hay calificaciones
- Lita, La Niña Del Fin Del MundoDocumento42 páginasLita, La Niña Del Fin Del MundoCindy KatherineAún no hay calificaciones
- Hipias MenorDocumento12 páginasHipias MenorangieAún no hay calificaciones
- Mezcla Transporte Colocacion y Curado Del ConcretoDocumento6 páginasMezcla Transporte Colocacion y Curado Del ConcretoLuis George Odar Acosta100% (3)
- Experiencias-Latinoamericanas de Análisis Organizacionales y Políticas Públicas LocalesDocumento314 páginasExperiencias-Latinoamericanas de Análisis Organizacionales y Políticas Públicas LocalesLuis J. AgudeloAún no hay calificaciones
- Plan de ContingenciaDocumento48 páginasPlan de ContingenciaROLANDO JAVIER CANGALAYA MARTINEZAún no hay calificaciones
- Diagonalización de Formas CuadráticasDocumento3 páginasDiagonalización de Formas CuadráticasCivil FbCivilAún no hay calificaciones
- Sensor de Temperatura Del Refrigerante PDFDocumento4 páginasSensor de Temperatura Del Refrigerante PDFJose VillalbaAún no hay calificaciones
- Taller: Convivencia, Basada en El Respeto Por Sí Mismo Y Los OtrosDocumento2 páginasTaller: Convivencia, Basada en El Respeto Por Sí Mismo Y Los OtrosMaria Carla Rocio Fabian AjayaAún no hay calificaciones
- Prototipo Vivienda Rural-Dannia O. Guerrero G - Ada P. Fierro G.Documento133 páginasPrototipo Vivienda Rural-Dannia O. Guerrero G - Ada P. Fierro G.Angel RamirezAún no hay calificaciones
- Detección incendiosDocumento6 páginasDetección incendiosJulian AyalaAún no hay calificaciones
- Modelo de Negocio Paradas de Planta MASA - STORKDocumento36 páginasModelo de Negocio Paradas de Planta MASA - STORKJOEDUMPMPAún no hay calificaciones
- Qué es América LatinaDocumento16 páginasQué es América LatinaRocío MiroloAún no hay calificaciones
- Manual Del Estudiante ClarolineDocumento12 páginasManual Del Estudiante ClarolineLuisAún no hay calificaciones
- Ejemplo UOC MapReduce-1Documento10 páginasEjemplo UOC MapReduce-1Walter0% (1)
- Temporizadores ENYA Serie - Retardos, Impulsos y Ciclos SimétricosDocumento3 páginasTemporizadores ENYA Serie - Retardos, Impulsos y Ciclos SimétricosClaudio Patricio Zarate VidalAún no hay calificaciones
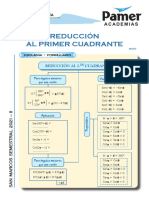
- T - Sem7 - Reducción Al Primer CuadranteDocumento3 páginasT - Sem7 - Reducción Al Primer CuadranteJesús Curasma de la CruzAún no hay calificaciones
- Contrato AtomyDocumento4 páginasContrato AtomyJulio GomezAún no hay calificaciones
- Encuesta EmpoderamientoDocumento2 páginasEncuesta EmpoderamientoLuz Magali Mamani AlcaAún no hay calificaciones
- Informe de Pasantias Mayra Listisimoo PDFDocumento56 páginasInforme de Pasantias Mayra Listisimoo PDFJesus'Diaz'100% (2)
- Resortes en Serie y ParaleloDocumento29 páginasResortes en Serie y ParaleloRoberto C. Caballero FAún no hay calificaciones
- Caso Práctico 2Documento4 páginasCaso Práctico 2Wendy González LunaAún no hay calificaciones