También podría gustarte
- Mantenimiento del sistema de alumbrado y señalización. TMVG0209De EverandMantenimiento del sistema de alumbrado y señalización. TMVG0209Aún no hay calificaciones
- Ingenieria AutomotrizDocumento15 páginasIngenieria AutomotrizRaul HinojozaAún no hay calificaciones
- 8 Febrero Redes de Comunicación AutomotrizDocumento60 páginas8 Febrero Redes de Comunicación AutomotrizBRAYAN ANDRES NOVOA LLANGAAún no hay calificaciones
- Aplicaciones de Puente WeastoneDocumento4 páginasAplicaciones de Puente WeastoneJorgeTaipe100% (1)
- Sensores - Induct. Capaciti. Final de CarreraDocumento51 páginasSensores - Induct. Capaciti. Final de CarreraFanny FloresAún no hay calificaciones
- 750-281 Level Master 2009 Spanish - EspanolDocumento58 páginas750-281 Level Master 2009 Spanish - EspanolJosé Miguel Durán Guzmán100% (5)
- Sensores para Análisis de VibracionesDocumento32 páginasSensores para Análisis de VibracionesCELIMAR ALVAREZ GAún no hay calificaciones
- Mantenimiento de redes eléctricas aéreas de baja tensión. ELEE0109De EverandMantenimiento de redes eléctricas aéreas de baja tensión. ELEE0109Aún no hay calificaciones
- Sensor de Proximidad-SenatiDocumento52 páginasSensor de Proximidad-SenatiAndy Josue RiveraAún no hay calificaciones
- Sensores electroquímicos: Teoría y aplicacionesDe EverandSensores electroquímicos: Teoría y aplicacionesAún no hay calificaciones
- Codigo Errores - E265B-E305B - 5 - ESDocumento118 páginasCodigo Errores - E265B-E305B - 5 - ESOscar Vazques0% (2)
- Sensores DiscretosDocumento21 páginasSensores DiscretosAmable Araya RiquelmeAún no hay calificaciones
- Clasificación de Sensores y TransductoresDocumento8 páginasClasificación de Sensores y TransductoresJaneth Cossio ChavezAún no hay calificaciones
- Dispositivos Electronicos Caterpillar 2011Documento93 páginasDispositivos Electronicos Caterpillar 2011jhon100% (1)
- Tipos de Sensores IndustrialesDocumento14 páginasTipos de Sensores IndustrialesMario Ramos CatroAún no hay calificaciones
- Tipos de SensoresDocumento54 páginasTipos de SensoresANGELICA DAYANA MEJIA MORALESAún no hay calificaciones
- UF1445 - Realización de las intervenciones necesarias para el mantenimiento de las instalaciones eléctricas en el entorno de edificios y con fines especialesDe EverandUF1445 - Realización de las intervenciones necesarias para el mantenimiento de las instalaciones eléctricas en el entorno de edificios y con fines especialesAún no hay calificaciones
- Tesis DISEÑO IMPLEMENTACION SIMULADOR Caterpillar (Universidad Catolica)Documento57 páginasTesis DISEÑO IMPLEMENTACION SIMULADOR Caterpillar (Universidad Catolica)arnold100% (1)
- Electricidad y Electronica Industrial. - Campo de AplicacionDocumento24 páginasElectricidad y Electronica Industrial. - Campo de AplicacionNizayet Jacinto Cruz90% (10)
- Conceptos Basicos SensoresDocumento12 páginasConceptos Basicos SensoresJulio c Resendiz100% (2)
- Qué Es Un SensorDocumento15 páginasQué Es Un SensorFernanda VargasAún no hay calificaciones
- Qué Es Un SensorDocumento16 páginasQué Es Un Sensornorida vargas trujilloAún no hay calificaciones
- Tipos de SensoresDocumento7 páginasTipos de Sensoresheraldo84Aún no hay calificaciones
- MD - T3.3.1 Tipos de SensoresDocumento4 páginasMD - T3.3.1 Tipos de SensoresVictor HernandezAún no hay calificaciones
- Sensor de MovimientoDocumento20 páginasSensor de MovimientoHenry QuispAún no hay calificaciones
- Detector de Humedad para Plantas y Otras UtilidadesDocumento15 páginasDetector de Humedad para Plantas y Otras UtilidadesChriistianRDresdnerAún no hay calificaciones
- Sesion 5 FADocumento43 páginasSesion 5 FAmaick Gómez EspinozaAún no hay calificaciones
- Sensores y Activadores ExpoDocumento15 páginasSensores y Activadores ExpoEnrique Albarracín EstupiñanAún no hay calificaciones
- 4.1 Sensores y TransductoresDocumento5 páginas4.1 Sensores y TransductoresAlfredo MartinezAún no hay calificaciones
- SensoresDocumento11 páginasSensoresMaria Francisca MombergAún no hay calificaciones
- Sensores ElectronicosDocumento17 páginasSensores ElectronicosEINER WILLIAM ALA BALTZARAún no hay calificaciones
- Jesús Esteban Lázaro Morales - Actividad 2-Tema 1Documento9 páginasJesús Esteban Lázaro Morales - Actividad 2-Tema 1Eiter Antonio SantiagoAún no hay calificaciones
- Tarea 6 SensoresDocumento13 páginasTarea 6 SensoresCARLOS HIRAM ESTEVEZ CASTROAún no hay calificaciones
- Resumen de Los SensoresDocumento10 páginasResumen de Los SensoresJose CamposAún no hay calificaciones
- Sensores Internos y Externos-151124000331-Lva1-App6892Documento20 páginasSensores Internos y Externos-151124000331-Lva1-App6892Jhonyverde ecolimpioAún no hay calificaciones
- Sensores para RobóticaDocumento15 páginasSensores para RobóticaCAMARGO GONZALEZ ERASMO JESUS INGENIER�A EL�CTRICAAún no hay calificaciones
- Sensores y Transductores de MovimientoDocumento50 páginasSensores y Transductores de MovimientoRobineyAún no hay calificaciones
- SensoresDocumento5 páginasSensoresrafaelAún no hay calificaciones
- Practica 2 TCyRDocumento10 páginasPractica 2 TCyRDiegozone Rivera MejiaAún no hay calificaciones
- Sensores y Elementos Terminales-Jose OvallesDocumento14 páginasSensores y Elementos Terminales-Jose OvallesJ_OvallesAún no hay calificaciones
- Electricidad y Electrónica IndustrialDocumento11 páginasElectricidad y Electrónica IndustrialErik MontanoAún no hay calificaciones
- Tipos de SensoresDocumento18 páginasTipos de SensoresEunice Macias RealAún no hay calificaciones
- Sensores Clasificacion y Caracteristicas de Funcionamiento.Documento15 páginasSensores Clasificacion y Caracteristicas de Funcionamiento.Ignacio MAún no hay calificaciones
- TCYR2802DP2Documento9 páginasTCYR2802DP2Dan Pinto de LeonAún no hay calificaciones
- Tipos de SensoresDocumento11 páginasTipos de Sensoresandresnfs20Aún no hay calificaciones
- Articulo SensoresDocumento6 páginasArticulo SensoresJessi ValadezAún no hay calificaciones
- Unidad 3 RDocumento22 páginasUnidad 3 RLuis Marcos AlvarezAún no hay calificaciones
- Tipos de Sensores e InterruptoresDocumento24 páginasTipos de Sensores e InterruptoresjamesAún no hay calificaciones
- Sensores y ActuadoresDocumento16 páginasSensores y ActuadoresLuis FernandezAún no hay calificaciones
- Act Apren2 YTJVDocumento10 páginasAct Apren2 YTJVJESSICA HURTADO LOZANOAún no hay calificaciones
- Tipos de SensoresDocumento32 páginasTipos de Sensoreskemberly oviedoAún no hay calificaciones
- Percepción y Visión RobóticaDocumento37 páginasPercepción y Visión Robóticawolf1922100% (1)
- 4.1 Sensores y Transductores ElectricosDocumento15 páginas4.1 Sensores y Transductores ElectricosYAHEL IRIBE - MEDINA100% (1)
- SENSORESDocumento18 páginasSENSORESLeobardo RomeroAún no hay calificaciones
- Comp I-1Documento16 páginasComp I-1Andres PerezAún no hay calificaciones
- Sensores y TransductoresDocumento13 páginasSensores y TransductoresJuan Carlos Espinoza FloresAún no hay calificaciones
- Senso FINDocumento27 páginasSenso FINFernando Choque PumaAún no hay calificaciones
- SensoresDocumento12 páginasSensoresRubén Darío Cárdenas EspinosaAún no hay calificaciones
- Aportes de TelemetriaDocumento14 páginasAportes de TelemetriaJuan Fernando RealpeAún no hay calificaciones
- INTRODUCCIÓN, Objetivos y Marco TeoricoDocumento4 páginasINTRODUCCIÓN, Objetivos y Marco TeoricoChristian Arias ChavezAún no hay calificaciones
- Unidad 2 SensoresDocumento28 páginasUnidad 2 SensoresJ Angel GonzalezAún no hay calificaciones
- Tema 4.1Documento9 páginasTema 4.1Cuevas Castillo Carlos OctavioAún no hay calificaciones
- Tipos de Señales AutomotricesDocumento6 páginasTipos de Señales AutomotricesKarla Te Amo te AmoAún no hay calificaciones
- Semana 7 - Conociendo SensoresDocumento4 páginasSemana 7 - Conociendo SensoresJuan Miguel Alcantara SiesquenAún no hay calificaciones
- Informe de Laboratorio de SensoresDocumento5 páginasInforme de Laboratorio de SensoresSteven Alzate CardonaAún no hay calificaciones
- Sensores TactilesDocumento11 páginasSensores TactilesIovanni FernándezAún no hay calificaciones
- Qué Es Un SensorDocumento4 páginasQué Es Un SensorgastonAún no hay calificaciones
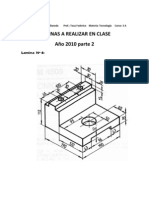
- Laminas 2010 Parte2Documento5 páginasLaminas 2010 Parte2FedeAún no hay calificaciones
- 1 - Introduccion A La Teoria Del ControlDocumento6 páginas1 - Introduccion A La Teoria Del ControlFedeAún no hay calificaciones
- 3 - ActuadoresDocumento16 páginas3 - ActuadoresFedeAún no hay calificaciones
- Trabajo de LaboratorioDocumento2 páginasTrabajo de LaboratorioFedeAún no hay calificaciones
- Hoja de TrabajosDocumento1 páginaHoja de TrabajosFedeAún no hay calificaciones
- Laminas 2010Documento5 páginasLaminas 2010FedeAún no hay calificaciones
- Control Temperatura - Ventilador LM35Documento7 páginasControl Temperatura - Ventilador LM35Soporte TecnicoAún no hay calificaciones
- 3Documento3 páginas3Jonnatan IglesiasAún no hay calificaciones
- Curso de Calibracion de Presion Con FLUKE PDFDocumento4 páginasCurso de Calibracion de Presion Con FLUKE PDFPedro BancayanAún no hay calificaciones
- Equi Fsa740Documento8 páginasEqui Fsa740DannyBarriosRosasAún no hay calificaciones
- Indicador de Nivel de AguaDocumento2 páginasIndicador de Nivel de AguaCast Ed IvAún no hay calificaciones
- Seguidor de LíneaDocumento8 páginasSeguidor de Líneacanoclara11Aún no hay calificaciones
- PROYECTOFINALDocumento188 páginasPROYECTOFINALespinozasalAún no hay calificaciones
- Sensores de TemperaturaDocumento6 páginasSensores de TemperaturaJesus MadueñoAún no hay calificaciones
- SMP Sem 06 IDENTIFICACION DE SENSORES DE VELOCIDAD EN LA MAQUINARIA PESADADocumento51 páginasSMP Sem 06 IDENTIFICACION DE SENSORES DE VELOCIDAD EN LA MAQUINARIA PESADAAnai Gutierres FuentesAún no hay calificaciones
- Trabajo Grupal Instrumentacion VirtualDocumento38 páginasTrabajo Grupal Instrumentacion VirtualLuis Fernando Calle JaramilloAún no hay calificaciones
- 950H - SensoresDocumento4 páginas950H - SensoresJORGE QUIQUIJANAAún no hay calificaciones
- ActividadDocumento3 páginasActividadviviana jacome100% (1)
- Elemento CapacitivoDocumento4 páginasElemento CapacitivoViktor ViktorAún no hay calificaciones
- INFORME Proyecto Medidas ElectricasDocumento4 páginasINFORME Proyecto Medidas ElectricasAlex VillegasAún no hay calificaciones
- Practica 1 InstrumentacionDocumento5 páginasPractica 1 InstrumentacionIsrael Pastelin MoralesAún no hay calificaciones
- Astm E2835-11Documento5 páginasAstm E2835-11RogelioBecerraFuentes100% (1)
- Manual Surtidor PUMPCONTROL-KROHNEDocumento51 páginasManual Surtidor PUMPCONTROL-KROHNEHernando Gonzalez Ardila100% (1)
- Presentación de Circuitos de ControlDocumento12 páginasPresentación de Circuitos de ControlFernanda Nieto UriosteguiAún no hay calificaciones
- Instrumentos de Campo - Informe FinalDocumento25 páginasInstrumentos de Campo - Informe FinalJhon Orrego jesusAún no hay calificaciones
- 59 Hanna2Documento34 páginas59 Hanna2Victor fajardoAún no hay calificaciones
- Práctica 3 de PLC - SDocumento8 páginasPráctica 3 de PLC - SLehiza Juárez AlvaradoAún no hay calificaciones
- Caja de VenteoDocumento3 páginasCaja de VenteoIsabel Navarro100% (1)
- Sesión 01Documento72 páginasSesión 01Jose Alberto Garcia RimacAún no hay calificaciones