También podría gustarte
- Procesos auxiliares de fabricación en el mecanizado por corte y conformado. FMEH0209De EverandProcesos auxiliares de fabricación en el mecanizado por corte y conformado. FMEH0209Aún no hay calificaciones
- Instalación de equipos y elementos de sistemas de automatización industrial. ELEM0311De EverandInstalación de equipos y elementos de sistemas de automatización industrial. ELEM0311Calificación: 2 de 5 estrellas2/5 (1)
- Controladores (Lazo Abierto y Cerrado)Documento6 páginasControladores (Lazo Abierto y Cerrado)Alonso RoGaAún no hay calificaciones
- Sistemas de lazo abierto y cerradoDocumento5 páginasSistemas de lazo abierto y cerradoJOSE ANTONIO SOSSA RODRIGUEZAún no hay calificaciones
- Sistemas de Lazo Abierto Vs Sistemas de LazoDocumento14 páginasSistemas de Lazo Abierto Vs Sistemas de LazoWILLIAMS CABRERAAún no hay calificaciones
- Sistema de Control de Lazo Abierto y Lazo CerradoDocumento4 páginasSistema de Control de Lazo Abierto y Lazo CerradoMairon Yadir Campos MerchanAún no hay calificaciones
- Control de lazo abierto y cerradoDocumento4 páginasControl de lazo abierto y cerradoFranz Yarari ArahonaAún no hay calificaciones
- Tipos de ControlesDocumento5 páginasTipos de ControlesMarco PerezAún no hay calificaciones
- AUTÓMATASDocumento4 páginasAUTÓMATASsilvia cardenasAún no hay calificaciones
- Sistemas de control de procesosDocumento13 páginasSistemas de control de procesosSantiago RiveraAún no hay calificaciones
- (Control Analogico) Evaluacion Unidad IIIDocumento16 páginas(Control Analogico) Evaluacion Unidad IIIAlfonso García MartínezAún no hay calificaciones
- Sistemas de control y automatismos en máquinasDocumento14 páginasSistemas de control y automatismos en máquinasAG Adrian100% (1)
- Sistemas de lazo abierto y cerrado: control y funcionamientoDocumento6 páginasSistemas de lazo abierto y cerrado: control y funcionamientocapresoca EPSAún no hay calificaciones
- Sistemas de control de lazo abierto y cerrado en procesos industrialesDocumento10 páginasSistemas de control de lazo abierto y cerrado en procesos industrialesDanitza TacoAún no hay calificaciones
- Sistemas de control de lazo abierto y cerradoDocumento4 páginasSistemas de control de lazo abierto y cerradoYisus100% (1)
- Sistema de Control de Riego Por GoteoDocumento8 páginasSistema de Control de Riego Por Goteoladyruth26Aún no hay calificaciones
- Unidad 1 SCSDocumento18 páginasUnidad 1 SCSMiguel Ángel García Sanchiz100% (1)
- Automatización industrial: conceptos básicosDocumento28 páginasAutomatización industrial: conceptos básicosmil16Aún no hay calificaciones
- Electrónica IndustrialDocumento10 páginasElectrónica Industrialdavid veraAún no hay calificaciones
- INTRODUCCIÓN A LOS SISTEMAS DE CONTROL AUTOMÁTICO - Figueroa - SmithDocumento5 páginasINTRODUCCIÓN A LOS SISTEMAS DE CONTROL AUTOMÁTICO - Figueroa - SmithConstanza Figueroa MenesesAún no hay calificaciones
- Sistemas de Control - ActividadesDocumento4 páginasSistemas de Control - Actividadescarola10Aún no hay calificaciones
- Automatism OsDocumento42 páginasAutomatism OsSebas ValenciaAún no hay calificaciones
- Automatización IndustrialDocumento37 páginasAutomatización IndustrialFabricio Andrés Segarra ReyesAún no hay calificaciones
- Instrumentación y Dispositivo de Control Automático para El Accionamiento de Bombas EléctricasDocumento13 páginasInstrumentación y Dispositivo de Control Automático para El Accionamiento de Bombas EléctricasDiego Alejandro Leyton TrigoAún no hay calificaciones
- Ladder 1Documento17 páginasLadder 1danielAún no hay calificaciones
- Tipos de Sistema de ControlDocumento8 páginasTipos de Sistema de ControlCristian Arturo SamudioAún no hay calificaciones
- Presentación Unidad I y IIDocumento37 páginasPresentación Unidad I y IIManuel SantanaAún no hay calificaciones
- Controles Automaticos - Trabajo 1Documento12 páginasControles Automaticos - Trabajo 1Ángeles SuárezAún no hay calificaciones
- P1 - 2 - Introduccion A Los Sistemas de ControlDocumento12 páginasP1 - 2 - Introduccion A Los Sistemas de Controlsofy naranjoAún no hay calificaciones
- Sistemas de Control TN2Documento13 páginasSistemas de Control TN2David Molina MoraleAún no hay calificaciones
- Trabajo SENADocumento7 páginasTrabajo SENAnancho85Aún no hay calificaciones
- Sistema de Control Automático y Programación de PLCDocumento33 páginasSistema de Control Automático y Programación de PLCDavid BobadillaAún no hay calificaciones
- Sistemas de ControlDocumento22 páginasSistemas de Controlwinfer90Aún no hay calificaciones
- Instrumentación y Control de ProcesosDocumento37 páginasInstrumentación y Control de ProcesosErick Munayco GarciaAún no hay calificaciones
- Control AnalogicoDocumento6 páginasControl Analogicofray1308Aún no hay calificaciones
- Sistema de Lazo Abierto y Lazo Cerrado en Un Proceso ProductivoDocumento7 páginasSistema de Lazo Abierto y Lazo Cerrado en Un Proceso ProductivoGerardo VelasteguiAún no hay calificaciones
- Material para El Mapa ConceptualDocumento5 páginasMaterial para El Mapa ConceptualCamilo Alberto Martinez TorresAún no hay calificaciones
- Automatizacion y ControlDocumento15 páginasAutomatizacion y ControlLozano SantanaAún no hay calificaciones
- Principios básicos de automatización industrialDocumento4 páginasPrincipios básicos de automatización industrialLeandro CapitanelliAún no hay calificaciones
- Instrumentación IndustrialDocumento76 páginasInstrumentación IndustrialLeonardo Leonardo PerezAún no hay calificaciones
- Simulacion de Los Sistemas de ControlDocumento13 páginasSimulacion de Los Sistemas de ControlGesse SteinerAún no hay calificaciones
- Sistemas de control automático y sus elementos básicosDocumento68 páginasSistemas de control automático y sus elementos básicosroberttv374Aún no hay calificaciones
- Control Eléctrico ITS AlvaradoDocumento12 páginasControl Eléctrico ITS AlvaradoMiguel NúñezAún no hay calificaciones
- Exponer Leviatan A Mi ModoDocumento4 páginasExponer Leviatan A Mi ModoLuisa LandeoAún no hay calificaciones
- Tema 1. Introducción A Los Sistemas de Medida y RegulaciónDocumento14 páginasTema 1. Introducción A Los Sistemas de Medida y RegulaciónpepeAún no hay calificaciones
- La Automatización y Su Importancia Dentro Del SistemaDocumento66 páginasLa Automatización y Su Importancia Dentro Del SistemaJuan Pablo DuranAún no hay calificaciones
- CONTROLADORES Jiménez+gilDocumento38 páginasCONTROLADORES Jiménez+gilYunis JimenezAún no hay calificaciones
- 3.3 Control Manual-Fuera-AutomaticoDocumento8 páginas3.3 Control Manual-Fuera-AutomaticoYarid Mendo100% (1)
- 2022 - 1.1 - Introduccion A Los Sistemas de ControlDocumento21 páginas2022 - 1.1 - Introduccion A Los Sistemas de ControlMarcelo NeiraAún no hay calificaciones
- Instrumentos Electricos IndustrialesDocumento17 páginasInstrumentos Electricos IndustrialesAlexsander Arellano Caceres100% (1)
- Taller Virtual Tecnología de ControlDocumento16 páginasTaller Virtual Tecnología de ControlGeno 1Aún no hay calificaciones
- Que Es Un Sistema de ControlDocumento12 páginasQue Es Un Sistema de ControlMargenis CoelloAún no hay calificaciones
- AUTOMATISMOSDocumento12 páginasAUTOMATISMOSWilliams FernandezAún no hay calificaciones
- Sistemas de control: historia, tipos y aplicacionesDocumento18 páginasSistemas de control: historia, tipos y aplicacionesAndres OrdoñezAún no hay calificaciones
- CONTROL AUTOMÁTICO - Galvez (Autoguardado)Documento5 páginasCONTROL AUTOMÁTICO - Galvez (Autoguardado)Fernando D. GalvezAún no hay calificaciones
- Introducción Al Control AutomáticoDocumento33 páginasIntroducción Al Control AutomáticoKaterin R GarciaAún no hay calificaciones
- Control Trabajo 1Documento4 páginasControl Trabajo 1Emilmar CuarezAún no hay calificaciones
- Estructura de Un Sistema AutomatizadoDocumento9 páginasEstructura de Un Sistema AutomatizadoSilvio Mendez GuillermoAún no hay calificaciones
- Tarea 1.1Documento5 páginasTarea 1.1Edith CoronelAún no hay calificaciones
- Proyecto-Final ControlDocumento12 páginasProyecto-Final ControlANAHI SOSA ROMEROAún no hay calificaciones
- 01 Concentracion Gravimetrica 120918213400 Phpapp01Documento107 páginas01 Concentracion Gravimetrica 120918213400 Phpapp01Silberman Callalli AlataAún no hay calificaciones
- Problemas de concentración y clasificación en plantaDocumento4 páginasProblemas de concentración y clasificación en plantaCESAR BASURTO CONTRERASAún no hay calificaciones
- PPT 1 Fundamentos Procesamiento de MineralesDocumento53 páginasPPT 1 Fundamentos Procesamiento de MineralesCesar Marino Basurto ContrerasAún no hay calificaciones
- Análisis FODA estrategias 40Documento39 páginasAnálisis FODA estrategias 40CESAR BASURTO CONTRERASAún no hay calificaciones
- Clases Miercoles Molienda de Minerales Con Uso de MolycoopDocumento212 páginasClases Miercoles Molienda de Minerales Con Uso de MolycoopCESAR BASURTO CONTRERASAún no hay calificaciones
- Prueba #11Documento1 páginaPrueba #11CESAR BASURTO CONTRERASAún no hay calificaciones
- 01 Gravmetria HidroDocumento32 páginas01 Gravmetria HidroCESAR BASURTO CONTRERASAún no hay calificaciones
- Chancado de Minerales-Conminucion-IntercadeDocumento40 páginasChancado de Minerales-Conminucion-IntercadeCESAR BASURTO CONTRERASAún no hay calificaciones
- Caracterizacion de La Pulpa MineralizadaDocumento16 páginasCaracterizacion de La Pulpa MineralizadaCESAR BASURTO CONTRERASAún no hay calificaciones
- Análisis FODA Universidad Nacional del Centro del PerúDocumento24 páginasAnálisis FODA Universidad Nacional del Centro del PerúCESAR BASURTO CONTRERASAún no hay calificaciones
- Prueba #10Documento1 páginaPrueba #10CESAR BASURTO CONTRERASAún no hay calificaciones
- Prueba #3Documento1 páginaPrueba #3CESAR BASURTO CONTRERASAún no hay calificaciones
- Prueba #2Documento1 páginaPrueba #2CESAR BASURTO CONTRERASAún no hay calificaciones
- Prueba #1Documento4 páginasPrueba #1CESAR BASURTO CONTRERASAún no hay calificaciones
- Control de RiesgosDocumento46 páginasControl de RiesgosCESAR BASURTO CONTRERASAún no hay calificaciones
- IPERCDocumento39 páginasIPERCDavid Cama MestanzaAún no hay calificaciones
- Clase Sesion 6 Auditoria de GestionDocumento26 páginasClase Sesion 6 Auditoria de GestionKaterinzita CrAún no hay calificaciones
- Un HuancaínoDocumento1 páginaUn HuancaínoCESAR BASURTO CONTRERASAún no hay calificaciones
- Analisis FODADocumento24 páginasAnalisis FODASamir Hinostroza TolentinoAún no hay calificaciones
- Del Sistema de Gestión de Seguridad y Salud en El TrabajoDocumento21 páginasDel Sistema de Gestión de Seguridad y Salud en El TrabajoCESAR BASURTO CONTRERASAún no hay calificaciones
- 3 .Guía Del Sistema de Gestión de La Seguridad y Salud en El TrabajoDocumento7 páginas3 .Guía Del Sistema de Gestión de La Seguridad y Salud en El TrabajoCESAR BASURTO CONTRERASAún no hay calificaciones
- 10 Consejos para Tener ExitosDocumento12 páginas10 Consejos para Tener ExitosCESAR BASURTO CONTRERASAún no hay calificaciones
- TrituradorasDocumento13 páginasTrituradorasCESAR BASURTO CONTRERASAún no hay calificaciones
- 02-Exposicion Congreso - RejasDocumento44 páginas02-Exposicion Congreso - RejasDanar S. LinaresAún no hay calificaciones
- Tecnicas Aplicadas A La Caracterizacion y Aprovechamiento de Recursos Geologico-Mineros PDFDocumento202 páginasTecnicas Aplicadas A La Caracterizacion y Aprovechamiento de Recursos Geologico-Mineros PDFGastón González JiménezAún no hay calificaciones
- Un HuancaínoDocumento1 páginaUn HuancaínoCESAR BASURTO CONTRERASAún no hay calificaciones
- Matriz de Consistencia Lourdes Coronel Leon CorregidoDocumento2 páginasMatriz de Consistencia Lourdes Coronel Leon CorregidoCesar Marino Basurto ContrerasAún no hay calificaciones
- Finalmetaword PDFDocumento23 páginasFinalmetaword PDFBrenda LarenasAún no hay calificaciones
- Aplicaciones de Los HidrociclonesDocumento57 páginasAplicaciones de Los HidrociclonesJESUS HERNANDEZAún no hay calificaciones
- Lopez Canchari Marco Erik Luque Machaca Roy WilmerDocumento147 páginasLopez Canchari Marco Erik Luque Machaca Roy WilmerGonzalesEscobarFabricioAún no hay calificaciones
- Ensayo - Memoria de Mis Putas TristesDocumento2 páginasEnsayo - Memoria de Mis Putas TristesLynjessenia100% (2)
- Terminos de Referencia para La Segunda Convocatoria de La Construccion de Tambo JahuiraDocumento72 páginasTerminos de Referencia para La Segunda Convocatoria de La Construccion de Tambo JahuiraraulicoAún no hay calificaciones
- Catalogo Sol Ups 5048WM EspDocumento2 páginasCatalogo Sol Ups 5048WM EspVAL TECHAún no hay calificaciones
- Lectura Complementaría 2Documento32 páginasLectura Complementaría 2Wilper Maurilio Faya CastroAún no hay calificaciones
- TCE-EpidemiologiaDocumento83 páginasTCE-EpidemiologiaGustavo RamirezAún no hay calificaciones
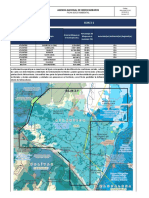
- Ficha Socioambiental SSJN 3-1 Ronda Colombia 2021Documento10 páginasFicha Socioambiental SSJN 3-1 Ronda Colombia 2021renewcol sasAún no hay calificaciones
- TPCC 1 (Eej)Documento4 páginasTPCC 1 (Eej)Edwar Villafuerte100% (1)
- InyectologíaDocumento5 páginasInyectologíaVivi ViviAún no hay calificaciones
- El Buda en Tu EspejoDocumento73 páginasEl Buda en Tu EspejoUlises ChávezAún no hay calificaciones
- Coloquio 2 Interacción MagnéticaDocumento9 páginasColoquio 2 Interacción MagnéticaAndresQuispeAún no hay calificaciones
- Clasificación Geomecánica de Roca en Minería SubterráneaDocumento16 páginasClasificación Geomecánica de Roca en Minería SubterráneaRerynaldo Willam Huchamaco AlanocaAún no hay calificaciones
- Método dual-simplex para resolver problemas de optimización linealDocumento6 páginasMétodo dual-simplex para resolver problemas de optimización linealUsuario 22Aún no hay calificaciones
- 01-Teorias Del AprendizajeDocumento21 páginas01-Teorias Del AprendizajeCristián EcheverríaAún no hay calificaciones
- Estado PortuguesaDocumento14 páginasEstado PortuguesaRosselys RodriguezAún no hay calificaciones
- Diccionario de Psicología - 200 Conceptos FundamentalesDocumento29 páginasDiccionario de Psicología - 200 Conceptos Fundamentalesdaisy eliza tadayAún no hay calificaciones
- Metodologia Evaluacion Peligros y RiesgosDocumento89 páginasMetodologia Evaluacion Peligros y RiesgosRoberto G. SilvaAún no hay calificaciones
- Broca Del Cafe y BetilidosDocumento24 páginasBroca Del Cafe y BetilidosDAYANA BOLAÑOSAún no hay calificaciones
- Geografia EconomicaDocumento19 páginasGeografia EconomicaJazmín Esperanza Orozco MonzónAún no hay calificaciones
- Análisis Biomecánica Del EsternoclavicularDocumento9 páginasAnálisis Biomecánica Del EsternoclavicularKATHERINE MILAGROS JIMENEZAún no hay calificaciones
- Carpeta Practica - Costos 2020 Con SolucionesDocumento68 páginasCarpeta Practica - Costos 2020 Con Solucionesdiego villagran100% (1)
- El Brindis de Kosmos 7Documento7 páginasEl Brindis de Kosmos 7Rls Kosmos SieteAún no hay calificaciones
- HONGOSDocumento178 páginasHONGOSCarina GuevaraAún no hay calificaciones
- Semana 06 Taller Operaciones Con Funciones - Composición de FuncionesDocumento5 páginasSemana 06 Taller Operaciones Con Funciones - Composición de FuncionesRenatoAún no hay calificaciones
- Evaluación Acumulativa Grado Séptimo Tercer PeriodoDocumento1 páginaEvaluación Acumulativa Grado Séptimo Tercer Periodomarcelita escobarAún no hay calificaciones
- Sistema Eda-Libro Digital Patronaje 01-Señora-IniciaciónDocumento71 páginasSistema Eda-Libro Digital Patronaje 01-Señora-IniciaciónisabelAún no hay calificaciones
- TEMPERATURADocumento22 páginasTEMPERATURARonald Jhonn Condori FloresAún no hay calificaciones
- Multi-Core Fiber Technology - En.esDocumento24 páginasMulti-Core Fiber Technology - En.esMarcelo AltafuyaAún no hay calificaciones
- GUÍA PRÁCTICA - SESIÓN 12 - Resuelto 2 y 3 + Dos UltimasDocumento13 páginasGUÍA PRÁCTICA - SESIÓN 12 - Resuelto 2 y 3 + Dos UltimasMaricielo Saravia F.Aún no hay calificaciones
- Instrumento de Valoración 6to GradoDocumento4 páginasInstrumento de Valoración 6to GradoElizabeth Francisco HernándezAún no hay calificaciones