También podría gustarte
- Manual de Servicio 3.3 (PCC3300)Documento526 páginasManual de Servicio 3.3 (PCC3300)Anonymous khOZ5G5We93% (15)
- O&M Manual GL309P SpanishDocumento134 páginasO&M Manual GL309P SpanishjoseAún no hay calificaciones
- MB 1700 Manual de Operacion PDFDocumento56 páginasMB 1700 Manual de Operacion PDFerickAún no hay calificaciones
- Fisica para Videojuegos Kenny ErlebenDocumento40 páginasFisica para Videojuegos Kenny ErlebenLuis Meza100% (2)
- 33d73456-da58-462c-a40a-b8fc01791880Documento90 páginas33d73456-da58-462c-a40a-b8fc01791880Yasmin Quintela100% (2)
- Reductor Sew Euro DriveDocumento156 páginasReductor Sew Euro DriveAlexander COLMENARES RINCÓNAún no hay calificaciones
- Martillo Atlas Copco CP 3050Documento60 páginasMartillo Atlas Copco CP 3050antonio riffo100% (2)
- Manual Slick Line V3 19-05-08Documento231 páginasManual Slick Line V3 19-05-08juacocujar100% (18)
- API 2cDocumento105 páginasAPI 2chcmcrlho50% (2)
- Fundamentos de optometría, 2a ed.: Refracción ocularDe EverandFundamentos de optometría, 2a ed.: Refracción ocularAún no hay calificaciones
- Tarea Del Efecto JouleDocumento2 páginasTarea Del Efecto JouleDavid Fernandez67% (3)
- 14 Aplicaciones Industriales de La Absorción de GasesDocumento6 páginas14 Aplicaciones Industriales de La Absorción de GasesValeria Catalina Galárraga Campoverde100% (2)
- 3GZF500730-85 Rev H ES - 05.2022 - LQPDocumento32 páginas3GZF500730-85 Rev H ES - 05.2022 - LQPOWEN F.FAún no hay calificaciones
- 7SD5xx Manual A2 V041002 Es-16Documento1 página7SD5xx Manual A2 V041002 Es-16varofAún no hay calificaciones
- Manual de Motores Electricos PDFDocumento187 páginasManual de Motores Electricos PDFWikifredo LF100% (1)
- Instrucciones de Montaje y Funcionamiento: Reductores Series R..7, F..7, K..7, S..7, SPIROPLAN WDocumento136 páginasInstrucciones de Montaje y Funcionamiento: Reductores Series R..7, F..7, K..7, S..7, SPIROPLAN WFernando RodriguezAún no hay calificaciones
- Installationandoperationmanual Traducido EspañolDocumento40 páginasInstallationandoperationmanual Traducido EspañolCesar RosilloAún no hay calificaciones
- Catalogo SewDocumento160 páginasCatalogo SewEber.CVAún no hay calificaciones
- MAG-UM-02721-ES M5000 Electrocmagnetic Flow Meter User ManualDocumento56 páginasMAG-UM-02721-ES M5000 Electrocmagnetic Flow Meter User ManualCésar Mauricio Huchin CámaraAún no hay calificaciones
- PDFDocumento216 páginasPDFPablo Hidalgo Valenzuela100% (1)
- Red SewDocumento188 páginasRed SewdmalfazAún no hay calificaciones
- TIS0002869.002 Es-MX Simba E7 C, ME7 C - MaintenanceDocumento380 páginasTIS0002869.002 Es-MX Simba E7 C, ME7 C - MaintenanceCarlos RiveraAún no hay calificaciones
- SEW Reductores Montaje y FuncionamientoDocumento240 páginasSEW Reductores Montaje y FuncionamientoMarcelo AlbeAún no hay calificaciones
- Qts SerieDocumento52 páginasQts Seriejuanddh crgAún no hay calificaciones
- Manua Onan - En.esDocumento49 páginasManua Onan - En.esfernandoAún no hay calificaciones
- Manual de Instrucciones Sistema de Soldadura Sin Gas (FCAW) FP-90Documento32 páginasManual de Instrucciones Sistema de Soldadura Sin Gas (FCAW) FP-90pati.gualterosbAún no hay calificaciones
- Manual Del Operario Operatörsmanual Es SV: LPE200 LPE220 LPE250Documento186 páginasManual Del Operario Operatörsmanual Es SV: LPE200 LPE220 LPE250Mar LoyolaAún no hay calificaciones
- Propulsión Parcial 2 - 230516 - 133201Documento29 páginasPropulsión Parcial 2 - 230516 - 133201Carlos Eduardo Rios DiazAún no hay calificaciones
- Tomo IIIDocumento340 páginasTomo IIISerrano AlexAún no hay calificaciones
- Acoplamientos Flexibles de Disco Thomas (Pulgada)Documento40 páginasAcoplamientos Flexibles de Disco Thomas (Pulgada)denisAún no hay calificaciones
- PDFDocumento260 páginasPDFalvaromecanico130Aún no hay calificaciones
- 01 Manual Interruptor Gl312f3 PDF FreeDocumento122 páginas01 Manual Interruptor Gl312f3 PDF FreeBill JhonAún no hay calificaciones
- Manual para SoldarDocumento34 páginasManual para SoldarRita Delgado100% (1)
- Manual de Instalación Operación Y Mantenimiento Motores ElécDocumento32 páginasManual de Instalación Operación Y Mantenimiento Motores Elécangel pabloAún no hay calificaciones
- Manual SKF para RebobinadoresDocumento40 páginasManual SKF para RebobinadoresPaola AmayaAún no hay calificaciones
- Api 2C - 2004 EspañolDocumento105 páginasApi 2C - 2004 EspañolAmauri Marrugo100% (1)
- Libros de Celdas Rice LakeDocumento58 páginasLibros de Celdas Rice LakeCarlos GarciaAún no hay calificaciones
- 0901d19680416953-10000 - 2-ES - Rolling-Bearings-1-100 PDFDocumento100 páginas0901d19680416953-10000 - 2-ES - Rolling-Bearings-1-100 PDFYoel Montañez SilvaAún no hay calificaciones
- SKF Rodamientos EspañolDocumento1382 páginasSKF Rodamientos Españoloscar gutierrezAún no hay calificaciones
- BBD Br010015ae2Documento274 páginasBBD Br010015ae2Marlon MontenegroAún no hay calificaciones
- Sew RF07Documento256 páginasSew RF07Adolfo ReverteAún no hay calificaciones
- Caja ZF Ecomat Manual Rep Con RefrigeracionDocumento383 páginasCaja ZF Ecomat Manual Rep Con RefrigeracionPañol TD10100% (1)
- Proyecto Integrador 2do. PARCIAL Completo Diseño y PlanosDocumento150 páginasProyecto Integrador 2do. PARCIAL Completo Diseño y PlanosAlister GallardoAún no hay calificaciones
- 01 Manual Interruptor GL312F3Documento122 páginas01 Manual Interruptor GL312F3Ricardo Rodriguez Torres100% (3)
- SPE120LDocumento220 páginasSPE120LJavier BellostaAún no hay calificaciones
- EBA 4G0092157 Es 130626Documento32 páginasEBA 4G0092157 Es 130626shir-oAún no hay calificaciones
- Instrucciones de Montaje y Funcionamiento: Reductores IndustrialesDocumento272 páginasInstrucciones de Montaje y Funcionamiento: Reductores IndustrialesDanny Javes Pereda100% (1)
- TSJB9143-00minicat OrugasDocumento28 páginasTSJB9143-00minicat OrugasmizaelAún no hay calificaciones
- 4006527883.1.4006657035 es-MX Cabletec LC - Maintenance - Mk9Documento308 páginas4006527883.1.4006657035 es-MX Cabletec LC - Maintenance - Mk9Cristián Vásquez100% (1)
- Manual UpsDocumento28 páginasManual UpsIvan ReducindoAún no hay calificaciones
- Instrucciones de Manejo Mettler Toledo Multirange Terminales de Pesada IND690-BaseDocumento140 páginasInstrucciones de Manejo Mettler Toledo Multirange Terminales de Pesada IND690-BaseJudith Herrera100% (1)
- SELECCIÓNDocumento82 páginasSELECCIÓNMishell EcheverriaAún no hay calificaciones
- Vehículo de Competición Formula Sae: Diseño Y Optimización Del ChasisDocumento79 páginasVehículo de Competición Formula Sae: Diseño Y Optimización Del ChasisItzel Gamez CurielAún no hay calificaciones
- PDFDocumento90 páginasPDFMileAún no hay calificaciones
- Manual SAP2000Documento78 páginasManual SAP2000Andrés CarreraAún no hay calificaciones
- Catalogo de Reductores y Motorreductores EURODRIVE PDFDocumento248 páginasCatalogo de Reductores y Motorreductores EURODRIVE PDFalfonzo gamezAún no hay calificaciones
- Matemáticas financieras empresariales - 2da ediciónDe EverandMatemáticas financieras empresariales - 2da ediciónAún no hay calificaciones
- F. Agüera, F.J. Aguilar, F. Carvajal, M.A. Aguilar, B. NavarroDocumento1 páginaF. Agüera, F.J. Aguilar, F. Carvajal, M.A. Aguilar, B. NavarroYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- 083Documento1 página083YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- F. Agüera, F.J. Aguilar, F. Carvajal, M.A. Aguilar, B. NavarroDocumento1 páginaF. Agüera, F.J. Aguilar, F. Carvajal, M.A. Aguilar, B. NavarroYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- F. Agüera, F.J. Aguilar, F. Carvajal, M.A. Aguilar, B. NavarroDocumento1 páginaF. Agüera, F.J. Aguilar, F. Carvajal, M.A. Aguilar, B. NavarroYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- 145Documento1 página145YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- O L L L L L L L L L L L O A A B B D D W: Capítulo 2 Fundamentos de Cinemática 33Documento1 páginaO L L L L L L L L L L L O A A B B D D W: Capítulo 2 Fundamentos de Cinemática 33YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- 255Documento1 página255YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Figura P2.68: Capítulo 16 Movimiento Plano de Cuerpos Rígidos: Fuerzas y AceleracionesDocumento1 páginaFigura P2.68: Capítulo 16 Movimiento Plano de Cuerpos Rígidos: Fuerzas y AceleracionesYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Capítulo 3 Síntesis Gráfi Ca de Eslabonamientos - . - . - . - . - . - . - . - . - . - . 87Documento1 páginaCapítulo 3 Síntesis Gráfi Ca de Eslabonamientos - . - . - . - . - . - . - . - . - . - . 87YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- A) Inversión Número 1 B) Inversión Número 2 C) Inversión Número 3 D) Inversión Número 4Documento1 páginaA) Inversión Número 1 B) Inversión Número 2 C) Inversión Número 3 D) Inversión Número 4YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- . De manera que (σ) .32 .415 (0.961) / (1 (0.885) ) : 750 Capítulo 14 Engranes rectos y helicoidalesDocumento1 página. De manera que (σ) .32 .415 (0.961) / (1 (0.885) ) : 750 Capítulo 14 Engranes rectos y helicoidalesYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Módulo Volumétrico: Figura 2.70 Estado de Esfuerzos Figura 2.69 Una Barra en TensiónDocumento1 páginaMódulo Volumétrico: Figura 2.70 Estado de Esfuerzos Figura 2.69 Una Barra en TensiónYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Límite Elástico y Deformación Plástica: Figura 2.62 Capa de MaterialDocumento1 páginaLímite Elástico y Deformación Plástica: Figura 2.62 Capa de MaterialYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- ' en Una Dirección Que Forma Un Ángulo de 45° Con El Eje de La CarDocumento1 página' en Una Dirección Que Forma Un Ángulo de 45° Con El Eje de La CarYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- A) El Cambio de Longitud de La Tubería, B) El Cambio en Su Diámetro Exterior, C) El Cambio en Su Espesor de ParedDocumento1 páginaA) El Cambio de Longitud de La Tubería, B) El Cambio en Su Diámetro Exterior, C) El Cambio en Su Espesor de ParedYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Problemas: B) Diámetro CDDocumento1 páginaProblemas: B) Diámetro CDYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- 125Documento1 página125YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Barras de Watt Cuya Primera Etapa Es de Grashof Como Se Muestra en La Fi Gura 3-7b. Por Lo Tanto, SeDocumento1 páginaBarras de Watt Cuya Primera Etapa Es de Grashof Como Se Muestra en La Fi Gura 3-7b. Por Lo Tanto, SeYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- 128Documento1 página128YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- A) Localización Del Rotopolo en El Ejemplo 3-2Documento1 páginaA) Localización Del Rotopolo en El Ejemplo 3-2YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Clases de Ambientes CorrosivosDocumento6 páginasClases de Ambientes CorrosivosRigoberto Castro IgnacioAún no hay calificaciones
- Práctica Suelos MercyDocumento10 páginasPráctica Suelos MercyMercyAnalíArgomedoBrionesAún no hay calificaciones
- ENSAYO DE EDIFICACIONES INDUSTRIALIZADAS - BanireDocumento6 páginasENSAYO DE EDIFICACIONES INDUSTRIALIZADAS - BanireBeca BagorAún no hay calificaciones
- Factores Preponderantes en La Localización de PlantaDocumento20 páginasFactores Preponderantes en La Localización de PlantaCristian Camilo Rico BallesterosAún no hay calificaciones
- Manual Ut502aDocumento10 páginasManual Ut502aLorena GranoblesAún no hay calificaciones
- Memoria de Cálculo Huechuraba 01Documento46 páginasMemoria de Cálculo Huechuraba 01Christian Espinosa0% (1)
- TRIPTICO La Cultura Tiahuanaco 2Documento2 páginasTRIPTICO La Cultura Tiahuanaco 2Jhosteing MoralesAún no hay calificaciones
- Puno Acora CapallaDocumento142 páginasPuno Acora CapallaClaudioOrdoñezAún no hay calificaciones
- Majes Siguas ProinversionDocumento11 páginasMajes Siguas ProinversionCarlos VegaAún no hay calificaciones
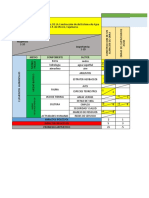
- Matriz de LeopoldDocumento3 páginasMatriz de LeopoldYaneth Aranda100% (2)
- 2019-1152B - Cotizacion - SR MIGUEL CORDOVA - CONTROL DE ACCESO PDFDocumento1 página2019-1152B - Cotizacion - SR MIGUEL CORDOVA - CONTROL DE ACCESO PDFMiller CórdovaAún no hay calificaciones
- Caso IDocumento7 páginasCaso ILee HansonAún no hay calificaciones
- S-2 Tecnologia de Concreto 2019-2 29-08-2019Documento37 páginasS-2 Tecnologia de Concreto 2019-2 29-08-2019Christian Najarro MarcatomaAún no hay calificaciones
- Taller de Instalación y Mantenimiento de Bombas CentrífugasDocumento31 páginasTaller de Instalación y Mantenimiento de Bombas CentrífugasElena Cua CauichAún no hay calificaciones
- Ensayo de Corte DirectoDocumento26 páginasEnsayo de Corte DirectoDavid Edgar Ramos HuallpaAún no hay calificaciones
- 2.D Guia de CompresoresDocumento2 páginas2.D Guia de CompresoresCarolina Chavez MonsalveAún no hay calificaciones
- SRM ProveedoresDocumento13 páginasSRM Proveedoreshenrysobrino100% (1)
- Ram 700 Modelo 2018Documento1 páginaRam 700 Modelo 2018GermaInc MendozaAún no hay calificaciones
- Exp - Acos - AnaDocumento19 páginasExp - Acos - AnaEdgardo Emigdio Rios AlvarezAún no hay calificaciones
- Laboratorio de Ingeniería de MaterialesDocumento5 páginasLaboratorio de Ingeniería de Materialessaul lopezAún no hay calificaciones
- 14 Assembler EstructurasdeControl-SaltosDocumento16 páginas14 Assembler EstructurasdeControl-SaltosAlexis Benjamin Rodriguez MantillaAún no hay calificaciones
- Diapos de Sedimentacion Meneses Falta GraficosDocumento28 páginasDiapos de Sedimentacion Meneses Falta GraficosClaudiaPalominoZelayaAún no hay calificaciones
- Universidad Peruana Los Andes: Facultad de IngenieríaDocumento340 páginasUniversidad Peruana Los Andes: Facultad de Ingenieríajose romeroAún no hay calificaciones
- 2 - Copia de Patente SEEBECKDocumento7 páginas2 - Copia de Patente SEEBECKFlor Retete ArriolaAún no hay calificaciones
- 7 - NitrogenoDocumento18 páginas7 - NitrogenoJahadiel AguilarAún no hay calificaciones
- Control de Ubicacion de PernosDocumento1 páginaControl de Ubicacion de Pernosroger palacin mendozaAún no hay calificaciones
- Examen Segundo Parcial Resuelto IiDocumento6 páginasExamen Segundo Parcial Resuelto IiReyna García ChoqueAún no hay calificaciones