También podría gustarte
- A) Localización Del Rotopolo en El Ejemplo 3-2Documento1 páginaA) Localización Del Rotopolo en El Ejemplo 3-2YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Sesión 4 Lam - Curvas Conicas-ModelDocumento1 páginaSesión 4 Lam - Curvas Conicas-ModelEMILY MAZA ZEGARRAAún no hay calificaciones
- Lámina 04 Curvas Conicas-ModelDocumento1 páginaLámina 04 Curvas Conicas-ModelJhonatan VeraAún no hay calificaciones
- 125Documento1 página125YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Lámina 4 - NicanorDocumento1 páginaLámina 4 - NicanorJose Flores GarciaAún no hay calificaciones
- Repaso 5 7 23 Qu244 I 2023Documento23 páginasRepaso 5 7 23 Qu244 I 2023Ignacio Calvo SolanoAún no hay calificaciones
- Capitulo 4 Síntesis Gráfica PDFDocumento18 páginasCapitulo 4 Síntesis Gráfica PDFAndres Torres100% (1)
- Intersección de PlanosDocumento1 páginaIntersección de PlanosBrayan Altamirano ZubietaAún no hay calificaciones
- Hoja 13 Al 20Documento8 páginasHoja 13 Al 20pedrorosner.stdaccAún no hay calificaciones
- AutoCAD 4 - MIGUEL-ModeloDocumento1 páginaAutoCAD 4 - MIGUEL-ModeloJose Flores GarciaAún no hay calificaciones
- 2.-Ovoides ConstruccionesDocumento4 páginas2.-Ovoides Construccionesandres farfanAún no hay calificaciones
- Clase 6 CURVAS TECNICAS PDFDocumento119 páginasClase 6 CURVAS TECNICAS PDFDayner Amante TorresAún no hay calificaciones
- C - SMS - C - Trigo - Área de Sector CircularDocumento4 páginasC - SMS - C - Trigo - Área de Sector CircularAlisson Gálvez ArévaloAún no hay calificaciones
- Área de Un Sector Circular: Problemas PropuestosDocumento2 páginasÁrea de Un Sector Circular: Problemas Propuestosestrella alvarez romero0% (1)
- Mecanismos de 4 Barras - 2013Documento29 páginasMecanismos de 4 Barras - 2013Andres RoblesAún no hay calificaciones
- Plano Electrico Primer PisoDocumento1 páginaPlano Electrico Primer PisoJavierVidalAún no hay calificaciones
- Modelo Redes 2019Documento15 páginasModelo Redes 2019Sofía GastaldiAún no hay calificaciones
- ProyectoDocumento20 páginasProyectoQuintanilla Roca HectorAún no hay calificaciones
- S4 Capa Red v4Documento72 páginasS4 Capa Red v4Victor Manuel FigueroaAún no hay calificaciones
- 03 Longitud de Arco - Area de Sector CircularDocumento6 páginas03 Longitud de Arco - Area de Sector CircularPercy TorresAún no hay calificaciones
- Trigonometría 2Documento8 páginasTrigonometría 2Stheffany RamosAún no hay calificaciones
- MecanismosDocumento58 páginasMecanismosgjcm97Aún no hay calificaciones
- Ejemplo Trazas y Visibilidad de RectasDocumento2 páginasEjemplo Trazas y Visibilidad de RectasNOELIA BEATRIZ JIMENEZ MENDIETAAún no hay calificaciones
- Informe N 3Documento5 páginasInforme N 3Roberto David Solis RoblesAún no hay calificaciones
- Cuadro SDocumento5 páginasCuadro SBlackshrk MusicAún no hay calificaciones
- Scel GRND 1Documento1 páginaScel GRND 1MATÍAS IGNACIO VIDAL BELMARAún no hay calificaciones
- Ejercicios Unity FBD PDFDocumento3 páginasEjercicios Unity FBD PDFVictor ChipantaxiAún no hay calificaciones
- 35 Trenes Eng Ran Es PDFDocumento47 páginas35 Trenes Eng Ran Es PDFEdwin SantiagoAún no hay calificaciones
- Enero 20Documento12 páginasEnero 20Manuel CaneiroAún no hay calificaciones
- 1995 JUN (Soluciones)Documento4 páginas1995 JUN (Soluciones)PABLO SÁNCHEZ NAVASAún no hay calificaciones
- Interruptor-9508 - 4 ViasDocumento1 páginaInterruptor-9508 - 4 ViasRicardo HadAún no hay calificaciones
- t4 Portada MergedDocumento17 páginast4 Portada MergedelenaserranonietoAún no hay calificaciones
- CarmenDocumento1 páginaCarmenMarco Antonio Palomino JaraAún no hay calificaciones
- Máquinas de Estados Finitos (FSM) : Ing. Rosalba Reyes Asignatura: Circuitos y Sistemas Digital IA/IIADocumento20 páginasMáquinas de Estados Finitos (FSM) : Ing. Rosalba Reyes Asignatura: Circuitos y Sistemas Digital IA/IIAMalena MedinaAún no hay calificaciones
- EJERCICIO PLANO 02-ModeloDocumento1 páginaEJERCICIO PLANO 02-ModeloALEXIS JUNIOR TAIRO AQUINOAún no hay calificaciones
- TP Árbol Con Solicitaciones VariablesDocumento29 páginasTP Árbol Con Solicitaciones VariablesFrancisco SalazarAún no hay calificaciones
- Solucion Sector CircularDocumento8 páginasSolucion Sector CircularNitram Ocin100% (3)
- AreasDocumento7 páginasAreasmariela nuñez villanuevaAún no hay calificaciones
- Practica 12 - Cepu Otoño 2019Documento5 páginasPractica 12 - Cepu Otoño 2019lokomapleAún no hay calificaciones
- Informe - Técnico (1) Ramon CaceresDocumento7 páginasInforme - Técnico (1) Ramon CaceresRamon Andres Caceres CamposAún no hay calificaciones
- Diseno Voladura Crater Aplicando Nuevo Modelo MatematicoDocumento52 páginasDiseno Voladura Crater Aplicando Nuevo Modelo MatematicoDavid Oropeza LeonAún no hay calificaciones
- Ejemplo 2 Ruta Mas CortaDocumento4 páginasEjemplo 2 Ruta Mas Cortahugo_castrillon_2Aún no hay calificaciones
- Pages SelectionDocumento11 páginasPages SelectionCurro Espadafor Fernandez AmigoAún no hay calificaciones
- Taller AgeoDocumento1 páginaTaller Ageoandres camilo oñateAún no hay calificaciones
- T SMS C Trigo Área de Sector CircularDocumento3 páginasT SMS C Trigo Área de Sector CircularAlexandra Junchaya RodrìguezAún no hay calificaciones
- Ie - 02Documento1 páginaIe - 02Vanessa NajarroAún no hay calificaciones
- A2 CimentacionesDocumento1 páginaA2 CimentacionesVieri ZamudioAún no hay calificaciones
- Tema2 DeformacionesDocumento17 páginasTema2 Deformacionesatzamora100% (9)
- 2022 12 13 Examen Acotado Corto-SolucionDocumento1 página2022 12 13 Examen Acotado Corto-SolucionMiguel Alvarez FloresAún no hay calificaciones
- Ejercicios de Dibujo TécnicoDocumento16 páginasEjercicios de Dibujo TécnicoJoelAún no hay calificaciones
- Arco NodoDocumento7 páginasArco NodoByron BarrigaAún no hay calificaciones
- ElectrohidraulicaDocumento29 páginasElectrohidraulicaBrayan Rojas0% (1)
- Planos ElectricosDocumento12 páginasPlanos ElectricosPablo AlmeidaAún no hay calificaciones
- Ejercicios Quimica OrganicaDocumento3 páginasEjercicios Quimica OrganicaJessyAlexaAún no hay calificaciones
- P1 G1Documento13 páginasP1 G1RafaelAún no hay calificaciones
- F. Agüera, F.J. Aguilar, F. Carvajal, M.A. Aguilar, B. NavarroDocumento1 páginaF. Agüera, F.J. Aguilar, F. Carvajal, M.A. Aguilar, B. NavarroYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- F. Agüera, F.J. Aguilar, F. Carvajal, M.A. Aguilar, B. NavarroDocumento1 páginaF. Agüera, F.J. Aguilar, F. Carvajal, M.A. Aguilar, B. NavarroYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- F. Agüera, F.J. Aguilar, F. Carvajal, M.A. Aguilar, B. NavarroDocumento1 páginaF. Agüera, F.J. Aguilar, F. Carvajal, M.A. Aguilar, B. NavarroYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- O L L L L L L L L L L L O A A B B D D W: Capítulo 2 Fundamentos de Cinemática 33Documento1 páginaO L L L L L L L L L L L O A A B B D D W: Capítulo 2 Fundamentos de Cinemática 33YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- 255Documento1 página255YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- 083Documento1 página083YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- 145Documento1 página145YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Módulo Volumétrico: Figura 2.70 Estado de Esfuerzos Figura 2.69 Una Barra en TensiónDocumento1 páginaMódulo Volumétrico: Figura 2.70 Estado de Esfuerzos Figura 2.69 Una Barra en TensiónYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Preliminares - Indd XVII Preliminares - Indd XVII 1/29/09 6:36:04 PM 1/29/09 6:36:04 PMDocumento1 páginaPreliminares - Indd XVII Preliminares - Indd XVII 1/29/09 6:36:04 PM 1/29/09 6:36:04 PMYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- . De manera que (σ) .32 .415 (0.961) / (1 (0.885) ) : 750 Capítulo 14 Engranes rectos y helicoidalesDocumento1 página. De manera que (σ) .32 .415 (0.961) / (1 (0.885) ) : 750 Capítulo 14 Engranes rectos y helicoidalesYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- A) Inversión Número 1 B) Inversión Número 2 C) Inversión Número 3 D) Inversión Número 4Documento1 páginaA) Inversión Número 1 B) Inversión Número 2 C) Inversión Número 3 D) Inversión Número 4YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Capítulo 3 Síntesis Gráfi Ca de Eslabonamientos - . - . - . - . - . - . - . - . - . - . 87Documento1 páginaCapítulo 3 Síntesis Gráfi Ca de Eslabonamientos - . - . - . - . - . - . - . - . - . - . 87YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Límite Elástico y Deformación Plástica: Figura 2.62 Capa de MaterialDocumento1 páginaLímite Elástico y Deformación Plástica: Figura 2.62 Capa de MaterialYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- ' en Una Dirección Que Forma Un Ángulo de 45° Con El Eje de La CarDocumento1 página' en Una Dirección Que Forma Un Ángulo de 45° Con El Eje de La CarYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Problemas: B) Diámetro CDDocumento1 páginaProblemas: B) Diámetro CDYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- A) El Cambio de Longitud de La Tubería, B) El Cambio en Su Diámetro Exterior, C) El Cambio en Su Espesor de ParedDocumento1 páginaA) El Cambio de Longitud de La Tubería, B) El Cambio en Su Diámetro Exterior, C) El Cambio en Su Espesor de ParedYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Figura P2.68: Capítulo 16 Movimiento Plano de Cuerpos Rígidos: Fuerzas y AceleracionesDocumento1 páginaFigura P2.68: Capítulo 16 Movimiento Plano de Cuerpos Rígidos: Fuerzas y AceleracionesYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Barras de Watt Cuya Primera Etapa Es de Grashof Como Se Muestra en La Fi Gura 3-7b. Por Lo Tanto, SeDocumento1 páginaBarras de Watt Cuya Primera Etapa Es de Grashof Como Se Muestra en La Fi Gura 3-7b. Por Lo Tanto, SeYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Materia SecaDocumento12 páginasMateria SecaIsmael Alessandro Peña CoronadoAún no hay calificaciones
- DATACENTERDocumento3 páginasDATACENTERSarai Orellana CifuentesAún no hay calificaciones
- Curso de Fundición BásicaDocumento3 páginasCurso de Fundición BásicaGustavo Díaz come pingaAún no hay calificaciones
- CATETERISMO CARDIACO, Cuidados Post CateterismoDocumento11 páginasCATETERISMO CARDIACO, Cuidados Post CateterismoDalila OrtegaAún no hay calificaciones
- Elementos de La EstrategiaDocumento2 páginasElementos de La EstrategiaKaos AquariusAún no hay calificaciones
- El Capital de Trabajo de Las Empresas de La Industria PDFDocumento12 páginasEl Capital de Trabajo de Las Empresas de La Industria PDFISSECJ 2019 2018-2019Aún no hay calificaciones
- Insuficiencia Estenosis Aortica (Tema 18)Documento58 páginasInsuficiencia Estenosis Aortica (Tema 18)Yascila VilchezAún no hay calificaciones
- Módulos Monocristalinos - Si-Esf-M-M125-36: Energía Solar FotovoltaicaDocumento6 páginasMódulos Monocristalinos - Si-Esf-M-M125-36: Energía Solar Fotovoltaicamanugp70Aún no hay calificaciones
- Sistema Periférico en ColombiaDocumento2 páginasSistema Periférico en ColombiaDanilo YT100% (1)
- Modulo I - MEII 1Documento14 páginasModulo I - MEII 1Yurico Vergara CoronelAún no hay calificaciones
- 2022 09 29 1 JBP Motivo - y - Objetivo - para - Que - Suceda SencilloDocumento36 páginas2022 09 29 1 JBP Motivo - y - Objetivo - para - Que - Suceda Sencillojoelquintogerencia_2Aún no hay calificaciones
- Jürgen Golte (2001) Cultura, Racionalidad y Migracion Andina PDFDocumento280 páginasJürgen Golte (2001) Cultura, Racionalidad y Migracion Andina PDFMiguelMejiaTamarizAún no hay calificaciones
- Inflación en ArgentinaDocumento3 páginasInflación en ArgentinaAnthony LunaAún no hay calificaciones
- Atención Inmediata Del Recién Nacido - 2015Documento39 páginasAtención Inmediata Del Recién Nacido - 2015Cielo QuispeAún no hay calificaciones
- ANUALIDADESDocumento22 páginasANUALIDADESodarAún no hay calificaciones
- Hiperónimos, Hipónimos y CohipónimosDocumento22 páginasHiperónimos, Hipónimos y CohipónimosHEIDY KAROLINA HERNANDEZ ENAMORADOAún no hay calificaciones
- 12.-Acero 2022.02Documento51 páginas12.-Acero 2022.02Juan DelgadoAún no hay calificaciones
- S01.-Biosfera y Ecosistema - ANTESDocumento16 páginasS01.-Biosfera y Ecosistema - ANTESraul flores tineoAún no hay calificaciones
- Reducto ResDocumento5 páginasReducto ResDavid Tuyo ZangaAún no hay calificaciones
- Inspeccion CamionetasDocumento3 páginasInspeccion Camionetasalexis pozo contrerasAún no hay calificaciones
- Biografia de Arne Naes1Documento6 páginasBiografia de Arne Naes1Valeria Vasquez PorrasAún no hay calificaciones
- Peritaje ZootecnicoDocumento7 páginasPeritaje ZootecnicoLuis Ignacio Herrera HernandezAún no hay calificaciones
- NutriciónDocumento10 páginasNutriciónkeivin rivera keivin riveraAún no hay calificaciones
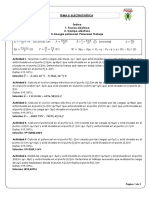
- Tema 5: Electrostática Índice 1. Fuerza Eléctrica 2. Campo Eléctrico 3. Energía Potencial. Potencial. TrabajoDocumento3 páginasTema 5: Electrostática Índice 1. Fuerza Eléctrica 2. Campo Eléctrico 3. Energía Potencial. Potencial. TrabajoAlma MarcelaAún no hay calificaciones
- TaxonomiaDocumento14 páginasTaxonomiamarco leonAún no hay calificaciones
- Fap2 - Ad - MaclDocumento3 páginasFap2 - Ad - MaclAndreaAún no hay calificaciones
- Ejercicios CostosDocumento3 páginasEjercicios Costosrogelio gonzalez0% (1)
- Mapa Mental GravimetriaDocumento1 páginaMapa Mental GravimetriaRony Coleman100% (1)
- Informe Individualizado de Recuperación. 2º Bachillerato. GeografíaDocumento5 páginasInforme Individualizado de Recuperación. 2º Bachillerato. GeografíaArGeoHistoAún no hay calificaciones