También podría gustarte
- Control de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalDe EverandControl de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalCalificación: 5 de 5 estrellas5/5 (4)
- Implantación de RobotsDocumento29 páginasImplantación de RobotsGabriela Llerena100% (1)
- Diseño y Control de Una Celula RobotizadaDocumento9 páginasDiseño y Control de Una Celula RobotizadaMisael Miguel Matos DíazAún no hay calificaciones
- Capitulo 9Documento27 páginasCapitulo 9zakty_182Aún no hay calificaciones
- Resumen Robotica 123254Documento9 páginasResumen Robotica 123254Diego AlejandroAún no hay calificaciones
- Cuestionario de Robotica IndustrialDocumento9 páginasCuestionario de Robotica IndustrialCristhian Campos100% (1)
- Cuestionario de Robótica IndustrialDocumento7 páginasCuestionario de Robótica IndustrialLuis NuelaAún no hay calificaciones
- Diseño de Celdas RobóticasDocumento13 páginasDiseño de Celdas RobóticasMonse Acosta0% (1)
- Criterios de Integracion de RobotsDocumento13 páginasCriterios de Integracion de RobotsAbelArfetSosaAún no hay calificaciones
- Criterios de Implemetacion de Un Brazo RoboticoDocumento8 páginasCriterios de Implemetacion de Un Brazo RoboticoMonse Acosta100% (1)
- Celdas RoboticasDocumento27 páginasCeldas RoboticasXimena GonzalezAún no hay calificaciones
- Guia CirosDocumento91 páginasGuia CirosHéctor PeñaAún no hay calificaciones
- Celda RoboticaDocumento22 páginasCelda RoboticaEberthson67% (3)
- Cuestionario PDFDocumento18 páginasCuestionario PDFDiana CacuangoAún no hay calificaciones
- Informe N°1 RoboticaDocumento15 páginasInforme N°1 RoboticaEduardo QuistanAún no hay calificaciones
- Criterios para La Seleccion de RobotsDocumento4 páginasCriterios para La Seleccion de RobotsĠėȑäȑďő GonzalezAún no hay calificaciones
- Criterios de instalación y programación de un robotDocumento29 páginasCriterios de instalación y programación de un robotdelfino8Aún no hay calificaciones
- Sistema de programación robotDocumento13 páginasSistema de programación robotKevin MontillaAún no hay calificaciones
- Caracerizacion de Robot FamucDocumento70 páginasCaracerizacion de Robot FamucJulia FernandezAún no hay calificaciones
- Introduccion A La RoboticaDocumento5 páginasIntroduccion A La RoboticaGanimedes EstelarAún no hay calificaciones
- Robotica Fase 6 - Presentar La Solucion Al Problema PlanteadoDocumento23 páginasRobotica Fase 6 - Presentar La Solucion Al Problema Planteadojefersson velasquez mendoza100% (1)
- Emit-527 MaterialDocumento19 páginasEmit-527 MaterialbryanAún no hay calificaciones
- Robótica IndustrialDocumento8 páginasRobótica IndustrialRenzo Mamani CherresAún no hay calificaciones
- Paper. Robótica Industrial PDFDocumento6 páginasPaper. Robótica Industrial PDFSebastián Contreras Ortiz100% (2)
- Morfología del robot manipuladorDocumento26 páginasMorfología del robot manipuladorRoyeiro Xavi DuduAún no hay calificaciones
- Robots en manufactura integradaDocumento9 páginasRobots en manufactura integradaFabian AlejandroAún no hay calificaciones
- Criterios de selección de robots industrialesDocumento10 páginasCriterios de selección de robots industrialesJonnathan Raúl DíazAún no hay calificaciones
- RoboticaDocumento113 páginasRoboticaRafael RodriguezAún no hay calificaciones
- Apuntes de Robótica UD1 Punto 3Documento11 páginasApuntes de Robótica UD1 Punto 3Francisco Alfonso Hernandez BravoAún no hay calificaciones
- Presentar solución robótica clasificación residuosDocumento16 páginasPresentar solución robótica clasificación residuoscarolina pereiraAún no hay calificaciones
- Seleccion BrazoDocumento4 páginasSeleccion BrazoMarcl Andrs SampdroAún no hay calificaciones
- Proyecto Robótica Módulo 1Documento11 páginasProyecto Robótica Módulo 1Fredy Andres Torres NavaAún no hay calificaciones
- ROBOTICAU1C2Documento23 páginasROBOTICAU1C2Jorge EnriquezAún no hay calificaciones
- Conceptos de Robótica IndustrialDocumento39 páginasConceptos de Robótica IndustrialDiego CandoAún no hay calificaciones
- Saul GarciaDocumento5 páginasSaul GarciaSaul Garcia AguilarAún no hay calificaciones
- SABER 3 Unidad 2 ElizaldeDocumento13 páginasSABER 3 Unidad 2 ElizaldeJosé Manuel Ávila LaraAún no hay calificaciones
- Definición y Clasificación de Robots PDFDocumento31 páginasDefinición y Clasificación de Robots PDFjuanchoanayaAún no hay calificaciones
- Robots IndustrialesDocumento16 páginasRobots IndustrialesMarco QuintosAún no hay calificaciones
- UNIDAD 6 RoboticaDocumento10 páginasUNIDAD 6 RoboticaAlberto Sánchez Delgado100% (1)
- Presentación 5Documento17 páginasPresentación 5Guillermo Caminero RamírezAún no hay calificaciones
- COSIMIRDocumento28 páginasCOSIMIRJoseph0% (1)
- Definición de Robot y RobóticaDocumento22 páginasDefinición de Robot y Robóticaliliana chacanAún no hay calificaciones
- TEMA01Documento31 páginasTEMA01Manuel Garcia SuarezAún no hay calificaciones
- Origen y estado del arte de la robótica industrialDocumento9 páginasOrigen y estado del arte de la robótica industrialNelson RodriguezAún no hay calificaciones
- Control de La Célula RobóticaDocumento20 páginasControl de La Célula RobóticaVianey Perez100% (1)
- Tarea N°1Documento6 páginasTarea N°1Abdiel AguilarAún no hay calificaciones
- Negro RoboticaDocumento8 páginasNegro RoboticaCARLOS GERARDO HERNANDEZ DIAZAún no hay calificaciones
- AyR_sesión_11bDocumento50 páginasAyR_sesión_11bwensantos0701Aún no hay calificaciones
- Tarea RobóticaDocumento3 páginasTarea RobóticayanhishAún no hay calificaciones
- Aponte Resumen ConferenciaDocumento16 páginasAponte Resumen ConferenciaJavier OrtizAún no hay calificaciones
- Tarea#1 - Román Eduardo Olivares GómezDocumento17 páginasTarea#1 - Román Eduardo Olivares GómezLuis ChongAún no hay calificaciones
- Diseño Conceptual Brazo RoboticoDocumento26 páginasDiseño Conceptual Brazo RoboticoOrlando Zech Ramos100% (1)
- 1.5 AplicacionesDocumento19 páginas1.5 AplicacionesErick Perez PalaciosAún no hay calificaciones
- Robot KJ244: características y aplicación en sistemas de pintura industrialDocumento13 páginasRobot KJ244: características y aplicación en sistemas de pintura industrialalbertoAún no hay calificaciones
- Diseño de Celdas de RoboticasDocumento5 páginasDiseño de Celdas de RoboticasJessy ZamoraAún no hay calificaciones
- Expo Unidad 4Documento30 páginasExpo Unidad 4Jacke AngelesAún no hay calificaciones
- Robótica IndustrialDocumento8 páginasRobótica IndustrialJorge Elias Moscoso SanchezAún no hay calificaciones
- LOPEZ AMBROSIO SALOMON ROBOTICA ReporteLecturaDocumento5 páginasLOPEZ AMBROSIO SALOMON ROBOTICA ReporteLecturasalomon ambrosioAún no hay calificaciones
- Proyecto Robot MovilDocumento6 páginasProyecto Robot MovilJoe OrlandoAún no hay calificaciones
- Solución Al Ejercicio 6º (Tema 5) Módulo Calcularsumas:: M, T Inf, Diag, SupDocumento1 páginaSolución Al Ejercicio 6º (Tema 5) Módulo Calcularsumas:: M, T Inf, Diag, SupJesus Mejias CortesAún no hay calificaciones
- Tema 6Documento8 páginasTema 6Jesus Mejias CortesAún no hay calificaciones
- Tema 2Documento13 páginasTema 2Jesus Mejias CortesAún no hay calificaciones
- Temas Teoría 5-8Documento407 páginasTemas Teoría 5-8Jesus Mejias CortesAún no hay calificaciones
- Anexo. Listado Resumen de Cargas TérmicasDocumento3 páginasAnexo. Listado Resumen de Cargas TérmicasJesus Mejias CortesAún no hay calificaciones
- Plan Clase TRDocumento7 páginasPlan Clase TRMarcelo VilemaAún no hay calificaciones
- Innovación en El Cultivo Del Níspero JaponésDocumento58 páginasInnovación en El Cultivo Del Níspero JaponésJosé SAAún no hay calificaciones
- Informe Focolares 2022Documento24 páginasInforme Focolares 2022g102032hAún no hay calificaciones
- Resumen de Las Corrientes PsicológicasDocumento2 páginasResumen de Las Corrientes PsicológicasMode Cruz71% (34)
- Primer Grado - LISTOOODocumento6 páginasPrimer Grado - LISTOOOKevin CastroAún no hay calificaciones
- Fase 2 - Preguntas Orientadoras Web 1Documento4 páginasFase 2 - Preguntas Orientadoras Web 1ARIEL MONTENEGROAún no hay calificaciones
- Plan de MATEMÁTICAS 9° 2021Documento8 páginasPlan de MATEMÁTICAS 9° 2021hubaplaAún no hay calificaciones
- DivisibilidadDocumento11 páginasDivisibilidadCristina Navarro GilAún no hay calificaciones
- 2DO RV Actividades de Comprension de TextosDocumento4 páginas2DO RV Actividades de Comprension de TextosuriarteyaizaAún no hay calificaciones
- 23 - Deiner MenesesDocumento11 páginas23 - Deiner MenesesDEINERAún no hay calificaciones
- Universidad Nacional Autónoma de Honduras Facultad de Ciencias Escuela de FísicaDocumento2 páginasUniversidad Nacional Autónoma de Honduras Facultad de Ciencias Escuela de FísicaSamir VelasquezAún no hay calificaciones
- Actividad 2 - Cuadro Comparativo Sobre La Estructura y Función de Las Células Del Sistema NerviosoDocumento3 páginasActividad 2 - Cuadro Comparativo Sobre La Estructura y Función de Las Células Del Sistema Nerviosokaren de la ossa75% (4)
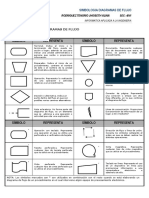
- S6 - Dip - 2021 - T3.2 - MD - Simbolos de Flujograma PDFDocumento1 páginaS6 - Dip - 2021 - T3.2 - MD - Simbolos de Flujograma PDFKevin GuzmanAún no hay calificaciones
- Administracion - Rocio Arelí Acosta RojasDocumento79 páginasAdministracion - Rocio Arelí Acosta RojasGian Pierre SilveraAún no hay calificaciones
- 20201029-121009-La Biodiversidad en El PeruDocumento4 páginas20201029-121009-La Biodiversidad en El PeruJosh BecaAún no hay calificaciones
- Torres de Enfrto 2019Documento30 páginasTorres de Enfrto 2019Liliana LiraAún no hay calificaciones
- Hablemos de ViolenciaDocumento7 páginasHablemos de ViolenciaSara RojasAún no hay calificaciones
- Area de Formacion Experiencia y Aprendizaje en PNL y CoachingDocumento24 páginasArea de Formacion Experiencia y Aprendizaje en PNL y CoachingFernanda GomezzAún no hay calificaciones
- Corte y Perfilado de TaludDocumento2 páginasCorte y Perfilado de Taludjuan pablo Espinoza ZacariasAún no hay calificaciones
- Educación a distancia: origen, características y retosDocumento1 páginaEducación a distancia: origen, características y retosMag GbAún no hay calificaciones
- Administración de Base de Datos Ii PDFDocumento8 páginasAdministración de Base de Datos Ii PDFroy saavedraAún no hay calificaciones
- ATS BorradorDocumento2 páginasATS BorradorNubia Amparo Tovar LoaizaAún no hay calificaciones
- CHIRINOS CÉSPEDES Prod Acad 01 MatIIIDocumento11 páginasCHIRINOS CÉSPEDES Prod Acad 01 MatIIIcrisferAún no hay calificaciones
- Palabras homófonasDocumento6 páginasPalabras homófonasAlex CortesAún no hay calificaciones
- Modulo 1 Manual de TrabajoDocumento32 páginasModulo 1 Manual de TrabajoYissel TavarezAún no hay calificaciones
- Metodo de Separacion Liquido LiquidoDocumento2 páginasMetodo de Separacion Liquido Liquidoleydi aquino villarAún no hay calificaciones
- Opinión #117-2019/DTNDocumento8 páginasOpinión #117-2019/DTNAdrian AlexanderAún no hay calificaciones
- SPSU-860 - TAREA - U004 Lenguaje y Comunicacion.Documento2 páginasSPSU-860 - TAREA - U004 Lenguaje y Comunicacion.bruce royerio trujillo obregonAún no hay calificaciones
- Guia Proyectos de GestiónDocumento39 páginasGuia Proyectos de GestiónYulieth PerdomoAún no hay calificaciones
- Guía completa sobre gestión de almacenesDocumento4 páginasGuía completa sobre gestión de almacenesCésar David Aguilera RojasAún no hay calificaciones
- La revolución de la glucosa: Equilibra tus niveles de glucosa y cambiarás tu salud y tu vidaDe EverandLa revolución de la glucosa: Equilibra tus niveles de glucosa y cambiarás tu salud y tu vidaCalificación: 5 de 5 estrellas5/5 (200)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- Desastres y emergencias. Prevención, mitigación y preparaciónDe EverandDesastres y emergencias. Prevención, mitigación y preparaciónCalificación: 4 de 5 estrellas4/5 (5)
- Batidos Verdes Depurativos y Antioxidantes: Aumenta tu Vitalidad con Smoothie Detox Durante 10 Días Para Adelgazar y Bajar de Peso: Aumenta tu vitalidad con smoothie detox durante 10 días para adelgazar y bajar de pesoDe EverandBatidos Verdes Depurativos y Antioxidantes: Aumenta tu Vitalidad con Smoothie Detox Durante 10 Días Para Adelgazar y Bajar de Peso: Aumenta tu vitalidad con smoothie detox durante 10 días para adelgazar y bajar de pesoCalificación: 5 de 5 estrellas5/5 (2)
- La metamedicina. Cada síntoma es un mensaje: La curación a tu alcanceDe EverandLa metamedicina. Cada síntoma es un mensaje: La curación a tu alcanceCalificación: 5 de 5 estrellas5/5 (8)
- Neurociencia para vencer la depresión: La esprial ascendenteDe EverandNeurociencia para vencer la depresión: La esprial ascendenteCalificación: 4.5 de 5 estrellas4.5/5 (10)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Fisiopatología de las enfermedades cardiovascularesDe EverandFisiopatología de las enfermedades cardiovascularesCalificación: 5 de 5 estrellas5/5 (1)
- Notas de clase. Manual de farmacognosia: Análisis microscópico y fitoquímico, y usos de plantas medicinalesDe EverandNotas de clase. Manual de farmacognosia: Análisis microscópico y fitoquímico, y usos de plantas medicinalesAún no hay calificaciones
- Reconstrucción de dientes endodonciados: Pautas de actuación clínicaDe EverandReconstrucción de dientes endodonciados: Pautas de actuación clínicaCalificación: 5 de 5 estrellas5/5 (4)
- Anatomía & 100 estiramientos Esenciales (Color): Técnicas, beneficios, precauciones, consejos, tablas de series, dolenciasDe EverandAnatomía & 100 estiramientos Esenciales (Color): Técnicas, beneficios, precauciones, consejos, tablas de series, dolenciasCalificación: 4.5 de 5 estrellas4.5/5 (21)
- Disciplina Mental: Técnicas infalibles para lograr todo lo que te propones y eliminar la pereza y la procrastinación de tu vida para siempreDe EverandDisciplina Mental: Técnicas infalibles para lograr todo lo que te propones y eliminar la pereza y la procrastinación de tu vida para siempreCalificación: 5 de 5 estrellas5/5 (3)
- Borges y la memoria: De "Funes el memorioso" a la neurona de Jennifer AnistonDe EverandBorges y la memoria: De "Funes el memorioso" a la neurona de Jennifer AnistonCalificación: 5 de 5 estrellas5/5 (4)
- El libro conciso de la punción seca: Manual del terapeuta para las aplicaciones en los puntos gatillo miofasciales (Color)De EverandEl libro conciso de la punción seca: Manual del terapeuta para las aplicaciones en los puntos gatillo miofasciales (Color)Calificación: 3 de 5 estrellas3/5 (2)
- Dieta Para El Reflujo Biliar y Gastritis Alcalina - Incluye 20 Deliciosas Recetas Libres de Gluten y de Lácteos Para Tratar y Aliviar el Reflujo Biliar y Sus Molestos SíntomasDe EverandDieta Para El Reflujo Biliar y Gastritis Alcalina - Incluye 20 Deliciosas Recetas Libres de Gluten y de Lácteos Para Tratar y Aliviar el Reflujo Biliar y Sus Molestos SíntomasCalificación: 4 de 5 estrellas4/5 (9)
- Trucos para Leer la Mente de los Demás: Cómo Adivinar el Pensamiento de los Demás con Poco Esfuerzo. 2 Libros en 1 - Secretos de la Psicología Oscura, Cómo ser un Detector de MentirasDe EverandTrucos para Leer la Mente de los Demás: Cómo Adivinar el Pensamiento de los Demás con Poco Esfuerzo. 2 Libros en 1 - Secretos de la Psicología Oscura, Cómo ser un Detector de MentirasCalificación: 4.5 de 5 estrellas4.5/5 (3)
- Interpretación del ECG: Una Guía Práctica e Intuitiva para Aprender a Leer el ECG y Diagnosticar y Tratar ArritmiasDe EverandInterpretación del ECG: Una Guía Práctica e Intuitiva para Aprender a Leer el ECG y Diagnosticar y Tratar ArritmiasAún no hay calificaciones
- Zensorialmente : Dejá que tu cuerpo sea tu cerebroDe EverandZensorialmente : Dejá que tu cuerpo sea tu cerebroAún no hay calificaciones
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Neuroanatomía: Fundamentos de neuroanatomía estructural, funcional y clínicaDe EverandNeuroanatomía: Fundamentos de neuroanatomía estructural, funcional y clínicaCalificación: 4 de 5 estrellas4/5 (16)
- Sistema nervioso y osteopatía: Nervios periféricos, meninges craneales y espinales, y sistema nervioso vegetativo (Color)De EverandSistema nervioso y osteopatía: Nervios periféricos, meninges craneales y espinales, y sistema nervioso vegetativo (Color)Calificación: 5 de 5 estrellas5/5 (9)
- La invasión de la pseudociencia: Claves para orientarse en un mundo en donde casi todo es posibleDe EverandLa invasión de la pseudociencia: Claves para orientarse en un mundo en donde casi todo es posibleCalificación: 4.5 de 5 estrellas4.5/5 (15)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)