También podría gustarte
- Caracerizacion de Robot FamucDocumento70 páginasCaracerizacion de Robot FamucJulia FernandezAún no hay calificaciones
- CirosRobotics 2013 I HSDocumento50 páginasCirosRobotics 2013 I HSDaniel Henao SantanaAún no hay calificaciones
- Controladores Lógicos Programables PLCS: Msc. July Andrea Gómez CamperosDocumento43 páginasControladores Lógicos Programables PLCS: Msc. July Andrea Gómez Camperosluis chaustreAún no hay calificaciones
- Seguridad en estaciones automatizadasDocumento85 páginasSeguridad en estaciones automatizadasCristian JiménezAún no hay calificaciones
- Diferencia Entre PLC y PacDocumento2 páginasDiferencia Entre PLC y PacMarcelo Ramirez100% (1)
- Expo Redes ProfinetDocumento73 páginasExpo Redes Profinetelectronica1979Aún no hay calificaciones
- Caracteriticas RobotDocumento6 páginasCaracteriticas RobotAnonymous 125xJQAún no hay calificaciones
- Protocolos de Comunicaciones IndustrialesDocumento9 páginasProtocolos de Comunicaciones IndustrialesErick Fernando RivasAún no hay calificaciones
- Normas Internacionales para Diseño MecatrónicoDocumento13 páginasNormas Internacionales para Diseño MecatrónicoErick Mera OtoyaAún no hay calificaciones
- Configuración red DeviceNet RSNetworxDocumento23 páginasConfiguración red DeviceNet RSNetworxHuguito CruzAún no hay calificaciones
- Practica Abb 140Documento5 páginasPractica Abb 140Sara Ruiz TajueloAún no hay calificaciones
- Programacion de Robot de Coordenadas CartesianasDocumento9 páginasProgramacion de Robot de Coordenadas CartesianasIvan LopezAún no hay calificaciones
- Libro Profibus Int TapaDocumento173 páginasLibro Profibus Int TapaJonathan LujanAún no hay calificaciones
- PLC y Pac PDFDocumento46 páginasPLC y Pac PDFPafs ManAún no hay calificaciones
- Efectores y PrecisionDocumento29 páginasEfectores y PrecisionEli D'KidAún no hay calificaciones
- Tarjetas ISA, PCI, PCI ExpressDocumento22 páginasTarjetas ISA, PCI, PCI ExpressSimón RíosAún no hay calificaciones
- Acceso Datos Instrumento InteligenteDocumento30 páginasAcceso Datos Instrumento Inteligentepablosky33Aún no hay calificaciones
- SEMANA N°2 Instrumentación IndustrialDocumento49 páginasSEMANA N°2 Instrumentación IndustrialWilly Alexander López AlvaAún no hay calificaciones
- TSM C001 Curso Basico PLCDocumento22 páginasTSM C001 Curso Basico PLCJason PerezAún no hay calificaciones
- Taller MotoresDocumento21 páginasTaller Motoresevelio cotrino espinosaAún no hay calificaciones
- Articulo Robot CartesianoDocumento5 páginasArticulo Robot CartesianoRafa SantiagoAún no hay calificaciones
- Guia 6Documento24 páginasGuia 6bookskskAún no hay calificaciones
- LPAIC2010Documento189 páginasLPAIC2010Oskar RockdriguezAún no hay calificaciones
- Inter BusDocumento7 páginasInter BusJuan Jimenez MendozaAún no hay calificaciones
- PLC ABB PM564-RP-ATH-ACDocumento9 páginasPLC ABB PM564-RP-ATH-ACFrancisco100% (1)
- Proyecto-de-Residencias - Brazo RobotDocumento72 páginasProyecto-de-Residencias - Brazo RobotJulian Rafael Hernandez AltamiranoAún no hay calificaciones
- Tema 2 - Morfología Del RobotDocumento44 páginasTema 2 - Morfología Del RobotDulce VelizAún no hay calificaciones
- Introducción A Los Robots IndustrialesDocumento73 páginasIntroducción A Los Robots IndustrialesJose Antonio Mercado0% (1)
- PLC PDFDocumento27 páginasPLC PDFFelipe Arjona MartínezAún no hay calificaciones
- Práctica 3Documento12 páginasPráctica 3German MeraAún no hay calificaciones
- Introduccion Int Inteligente PDFDocumento13 páginasIntroduccion Int Inteligente PDFEduardo AdasmeAún no hay calificaciones
- Preguntas PDFDocumento4 páginasPreguntas PDFFrank RodríguezAún no hay calificaciones
- Practica 1Documento19 páginasPractica 1Luis BecerrilAún no hay calificaciones
- Simuladores de Robots - Jhannifer FDocumento10 páginasSimuladores de Robots - Jhannifer FJhannifer100% (1)
- Toolbox MatlabDocumento8 páginasToolbox MatlabSergio SorucoAún no hay calificaciones
- Inversion de Giro de Un MotorDocumento14 páginasInversion de Giro de Un MotorAbel Apaza FuentesAún no hay calificaciones
- Control de Posición de Balancín Con Motor y HéliceDocumento9 páginasControl de Posición de Balancín Con Motor y HéliceGabriel AyalaAún no hay calificaciones
- PWM s7-300Documento6 páginasPWM s7-300Juan Fernando CarmonaAún no hay calificaciones
- Robot 3Documento42 páginasRobot 3bryan nonaAún no hay calificaciones
- Movimientos circulares robot industrialDocumento10 páginasMovimientos circulares robot industrialAlexiz CuAún no hay calificaciones
- Guia 5 - Protocolo HARTDocumento12 páginasGuia 5 - Protocolo HARTarnoldAún no hay calificaciones
- Control de Movimiento SchneiderDocumento122 páginasControl de Movimiento SchneiderDavid IoannuAún no hay calificaciones
- Simulación Del RSLogix Emulate 5000Documento10 páginasSimulación Del RSLogix Emulate 5000EJASMANYAún no hay calificaciones
- OPERADORES FinalDocumento219 páginasOPERADORES FinalVik TulaAún no hay calificaciones
- RapidDocumento44 páginasRapidJorge Armando CalixtoAún no hay calificaciones
- Normas de Comunicación en SerieDocumento3 páginasNormas de Comunicación en SerieMajo Jonas MillerAún no hay calificaciones
- Práctica #3 Programación Básica Desde El FlexPendantDocumento3 páginasPráctica #3 Programación Básica Desde El FlexPendantJuan Mendoza BravoAún no hay calificaciones
- Control en Posicion de Un Servomotor CC Mediante Realimentacin Del EstadoDocumento29 páginasControl en Posicion de Un Servomotor CC Mediante Realimentacin Del EstadoMiguel DelgadoAún no hay calificaciones
- Glosario AutomatizacionDocumento11 páginasGlosario AutomatizacionAlejandro PazAún no hay calificaciones
- Vision ArtificialDocumento23 páginasVision ArtificialNatalia G LazcanoAún no hay calificaciones
- Informe Mini Sumo Digitales 1Documento4 páginasInforme Mini Sumo Digitales 1Yair Sebastian Herrera VegaAún no hay calificaciones
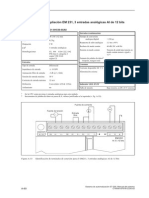
- A.33 Módulo de Ampliación EM 231, 3 Entradas Analógicas AI de 12 BitsDocumento9 páginasA.33 Módulo de Ampliación EM 231, 3 Entradas Analógicas AI de 12 BitsmcsecAún no hay calificaciones
- Contadores Rápidos Del PLC S7-200 Con CPU 224Documento4 páginasContadores Rápidos Del PLC S7-200 Con CPU 224bryan castroAún no hay calificaciones
- Pirámide Cim PDFDocumento8 páginasPirámide Cim PDFJulian ToscanoAún no hay calificaciones
- Expo PLCDocumento35 páginasExpo PLCKrish PowerAún no hay calificaciones
- Tren Flotante: Allanando el camino hacia los futuros trenes de alta velocidadDe EverandTren Flotante: Allanando el camino hacia los futuros trenes de alta velocidadAún no hay calificaciones
- Montaje y puesta en marcha de sistemas robóticos y sistemas de visión, en bienes de equipo y maquinaria industrial. FMEE0208De EverandMontaje y puesta en marcha de sistemas robóticos y sistemas de visión, en bienes de equipo y maquinaria industrial. FMEE0208Calificación: 3 de 5 estrellas3/5 (1)
- Mecatrónica: modelado, simulación y control de sistemas físicosDe EverandMecatrónica: modelado, simulación y control de sistemas físicosAún no hay calificaciones
- Robotica CriteriosDocumento13 páginasRobotica CriteriosIvan HerreaAún no hay calificaciones
- Practicas de MedidasDocumento25 páginasPracticas de MedidasLeiman Meneses ArrietaAún no hay calificaciones
- El Psicoanálisis y El SuicidioDocumento3 páginasEl Psicoanálisis y El SuicidioGimel Ontiveros XequebAún no hay calificaciones
- Técnicas Grupales, 11mo. GradoDocumento2 páginasTécnicas Grupales, 11mo. GradoAlejandra López-RiveraAún no hay calificaciones
- Latín y GriegoDocumento10 páginasLatín y GriegoManuel Muriel FloresAún no hay calificaciones
- Manual de Instrucciones Transportador Sinfin T-461 Version 2014 Nueva Casa GrandeDocumento31 páginasManual de Instrucciones Transportador Sinfin T-461 Version 2014 Nueva Casa GrandeJuan ChurataAún no hay calificaciones
- Informe de pasantía en ingeniería mecánicaDocumento9 páginasInforme de pasantía en ingeniería mecánicaDamian Ismael Cordero VintimillaAún no hay calificaciones
- Induccion de S&H 22Documento35 páginasInduccion de S&H 22Itza MorenoAún no hay calificaciones
- Plan de Negocio para Montar Una PanaderíaDocumento5 páginasPlan de Negocio para Montar Una PanaderíaDvid MedranAún no hay calificaciones
- AFROPERUANAS Situacion y Marco Legal de Sus Derechos T3 2014Documento24 páginasAFROPERUANAS Situacion y Marco Legal de Sus Derechos T3 2014Karla ZafraAún no hay calificaciones
- Matemáticas: Guía de nivelación para grados 8° y 9Documento7 páginasMatemáticas: Guía de nivelación para grados 8° y 9Juan RiveroAún no hay calificaciones
- 4° Grado Experiencia - 7Documento10 páginas4° Grado Experiencia - 7alejandro guzman valverdeAún no hay calificaciones
- La Biomasa Como Fuente de Energia Renovable en Centroamerica-Ing Orlando Aguilar-UTPDocumento38 páginasLa Biomasa Como Fuente de Energia Renovable en Centroamerica-Ing Orlando Aguilar-UTPMelanie Martinez RosasAún no hay calificaciones
- TE-Calentamiento Global y Acidificación de Los OcéanosDocumento29 páginasTE-Calentamiento Global y Acidificación de Los OcéanosLeysi Pasache GonzalesAún no hay calificaciones
- Especificaciones de obra para cerramiento, campamento y movimiento de tierrasDocumento13 páginasEspecificaciones de obra para cerramiento, campamento y movimiento de tierraslinaAún no hay calificaciones
- Sistema de Informacion de PlanillasDocumento20 páginasSistema de Informacion de Planillasdoris caceresAún no hay calificaciones
- Practica 4 PotenciometroDocumento6 páginasPractica 4 PotenciometroSunmin WoonAún no hay calificaciones
- Hidraulica de Tuberias y CanalesDocumento530 páginasHidraulica de Tuberias y CanalesÁngl Pln100% (1)
- Urgencias Tam Tab Aph 2015Documento15 páginasUrgencias Tam Tab Aph 2015Emily Del Valle HernándezAún no hay calificaciones
- Qué Es El Proceso de Cuentas Por CobrarDocumento11 páginasQué Es El Proceso de Cuentas Por CobrarLorena Ramirez DiazAún no hay calificaciones
- 2012 Memoria APIMADocumento21 páginas2012 Memoria APIMAAPIMACPURBANITZACIONAún no hay calificaciones
- Concurso Fiscalía - Acuerdo No. 001 de 2021Documento31 páginasConcurso Fiscalía - Acuerdo No. 001 de 2021Ronald Rincon SalgadoAún no hay calificaciones
- Monografia Motores GNVDocumento27 páginasMonografia Motores GNVAdrian Arturo Mogollón Huapaya100% (1)
- Resumen Eje 1-2-3-4Documento89 páginasResumen Eje 1-2-3-4EugeniaFerreroAún no hay calificaciones
- Solicitud para CorreoDocumento2 páginasSolicitud para CorreoCristian Tarrillo HerreraAún no hay calificaciones
- Ciencias Naturales 801 y 804 Guía 3Documento3 páginasCiencias Naturales 801 y 804 Guía 3Elian David Pupo RodriguezAún no hay calificaciones
- Ficha 1 Act 4 VI ComunicacionDocumento4 páginasFicha 1 Act 4 VI ComunicacionHugoFernandoCuseMamaniAún no hay calificaciones
- Af CompDocumento2 páginasAf Compunstoppable_360Aún no hay calificaciones
- Triptico Hábitos de Estudio para PadresDocumento2 páginasTriptico Hábitos de Estudio para PadresKatherine Fuenzalida CrisostoAún no hay calificaciones
- El Oráculo de ErindinlogunDocumento8 páginasEl Oráculo de ErindinlogunRayner PeñaAún no hay calificaciones