También podría gustarte
- 1 5186362057200500959Documento100 páginas1 5186362057200500959Ernesto NetoAún no hay calificaciones
- Aplicaciones de Laplace PDFDocumento60 páginasAplicaciones de Laplace PDFRoberto PerezAún no hay calificaciones
- Lab 2 Teoria de Control A. 1Documento10 páginasLab 2 Teoria de Control A. 1Luis Cupa H100% (1)
- Milton Rojas 954 Tarea 3Documento6 páginasMilton Rojas 954 Tarea 3Milton RojasAún no hay calificaciones
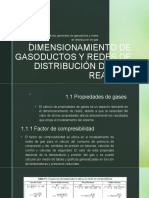
- Dimensionamiento de Gasoductos y Redes de Distribución deDocumento29 páginasDimensionamiento de Gasoductos y Redes de Distribución deAbner100% (1)
- Tema 2 UnlockedDocumento22 páginasTema 2 UnlockedMartín Ezequiel Pedrozo RocaAún no hay calificaciones
- Tarea 3 - Hans BernalDocumento9 páginasTarea 3 - Hans BernalelvisAún no hay calificaciones
- Tarea 4Documento3 páginasTarea 4Jorge AravenaAún no hay calificaciones
- Tarea 4Documento3 páginasTarea 4Jorge AravenaAún no hay calificaciones
- Resumen SistemasDocumento74 páginasResumen Sistemasjose.bailen03Aún no hay calificaciones
- Deber de Teoria 1 PDFDocumento16 páginasDeber de Teoria 1 PDFstalinAún no hay calificaciones
- Espacio de EstadosDocumento18 páginasEspacio de EstadosCristian AndradeAún no hay calificaciones
- Informe Taller 1 Analisis de Sistemas DinamicosDocumento11 páginasInforme Taller 1 Analisis de Sistemas DinamicosJorge FerbAún no hay calificaciones
- Actividades LaplaceDocumento3 páginasActividades Laplacelady daniela rivera jaimesAún no hay calificaciones
- DTFT, DFT y Procesamiento de Se Nales en FrecuenciaDocumento18 páginasDTFT, DFT y Procesamiento de Se Nales en FrecuenciaJavier EscobarAún no hay calificaciones
- Cur Lineales 2Documento18 páginasCur Lineales 2Victor Manuel Avendaño PezoAún no hay calificaciones
- Informe Analisis de Sistemas DinamicosDocumento8 páginasInforme Analisis de Sistemas DinamicosJorge FerbAún no hay calificaciones
- Tarea 3. Analisis en El Dominio Del Tiempo - Nicolas AlvarezDocumento15 páginasTarea 3. Analisis en El Dominio Del Tiempo - Nicolas AlvarezVBiomedica SASAún no hay calificaciones
- Transformada Laplace-1Documento6 páginasTransformada Laplace-1Yoel Toribio NuñezAún no hay calificaciones
- Actividad 3 Luis Manuel FonsecaDocumento14 páginasActividad 3 Luis Manuel FonsecaErick Machado100% (1)
- Tarea 3 Grupo 203042 45Documento32 páginasTarea 3 Grupo 203042 45Richard Mejia AcevedoAún no hay calificaciones
- Apuntes de ControlDocumento53 páginasApuntes de ControlDaniel BernsAún no hay calificaciones
- MatsupDocumento23 páginasMatsupKevin A. ChavarriaAún no hay calificaciones
- Clase 2 Modelamiento Matematico 2014 - 2Documento53 páginasClase 2 Modelamiento Matematico 2014 - 2GarySolórzanoDíazAún no hay calificaciones
- Hectoraparicio Tarea3Documento8 páginasHectoraparicio Tarea3mARgRAPHAún no hay calificaciones
- Taller 2 Señales & SistemasDocumento9 páginasTaller 2 Señales & SistemasStefany PiandoyAún no hay calificaciones
- Simulacion 1Documento10 páginasSimulacion 1Santiago SanchezAún no hay calificaciones
- Preliminares Matematicos Transformada de LaplaceDocumento39 páginasPreliminares Matematicos Transformada de LaplaceLima Garcia JuanAún no hay calificaciones
- Control Pratica 2Documento6 páginasControl Pratica 2Bryan ChallcoAún no hay calificaciones
- Transformada LaplaceDocumento7 páginasTransformada LaplaceLoveli Suero PimentelAún no hay calificaciones
- Laboratorio No1Documento5 páginasLaboratorio No1Laura HernandezAún no hay calificaciones
- U1. E D.O. Primera ParteDocumento15 páginasU1. E D.O. Primera ParteJGRIPPIAún no hay calificaciones
- Transformada de LaplaceDocumento4 páginasTransformada de LaplaceALejandro Quintero PinzónAún no hay calificaciones
- Tarea3 JoseVergara SignalsAndSystemsDocumento23 páginasTarea3 JoseVergara SignalsAndSystemsJOSE ALFREDO VERGARA BEJARANOAún no hay calificaciones
- Paso 3Documento5 páginasPaso 3AndresAmayaAún no hay calificaciones
- Aporte 1Documento4 páginasAporte 1Naimersoft SolucionesAún no hay calificaciones
- Modulo 2Documento28 páginasModulo 2Diana Sofía AfanadorAún no hay calificaciones
- CONTROL Mecat - U2. Analisis de Sistemas RealimentadosDocumento67 páginasCONTROL Mecat - U2. Analisis de Sistemas RealimentadosDeivid VlAún no hay calificaciones
- 16 - Fase 1 - ConsolidadoDocumento18 páginas16 - Fase 1 - ConsolidadoalbertoAún no hay calificaciones
- Errores ESTATICO DINAMICODocumento8 páginasErrores ESTATICO DINAMICOHernin PaucaraAún no hay calificaciones
- Brigada1 Grupo10 Practica4Documento10 páginasBrigada1 Grupo10 Practica4irvin said sanchez salazarAún no hay calificaciones
- Tarea 006Documento35 páginasTarea 006Roberto MartinezAún no hay calificaciones
- Informe 1Documento8 páginasInforme 1Davids DIAZAún no hay calificaciones
- Solucion Ec Dif Yec en DiferenciasDocumento1 páginaSolucion Ec Dif Yec en DiferenciasFabio MenesesAún no hay calificaciones
- Modelado y Simulacion - Tarea 1Documento6 páginasModelado y Simulacion - Tarea 1Elias PolancoAún no hay calificaciones
- Ejercicio3 - Juan Sebastian GomezDocumento27 páginasEjercicio3 - Juan Sebastian GomezJuan S. GómezAún no hay calificaciones
- Practica 3 - Chela - Muñoz - PachacamaDocumento14 páginasPractica 3 - Chela - Muñoz - PachacamaMarlon ProañoAún no hay calificaciones
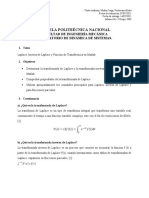
- Conference Latex Template 10 17 19Documento6 páginasConference Latex Template 10 17 19Daniel CabreraAún no hay calificaciones
- Tarea 4 - Ejercicio 1 2 3 Literal CDocumento11 páginasTarea 4 - Ejercicio 1 2 3 Literal CLeonardo RossyAún no hay calificaciones
- Clase 3 Modelamiento Matematico 2016 - 2Documento48 páginasClase 3 Modelamiento Matematico 2016 - 2Edwin Ancota AcoticonaAún no hay calificaciones
- CyA Ejercicios Tema1Documento6 páginasCyA Ejercicios Tema1AfoldoAún no hay calificaciones
- Coeficientes de Los Filtros 2Documento27 páginasCoeficientes de Los Filtros 2felres87Aún no hay calificaciones
- Lab 1Documento4 páginasLab 1KEVIN SANTIAGO CARREnO MANRIQUEAún no hay calificaciones
- TP 1,2 - LaplaceDocumento6 páginasTP 1,2 - LaplaceNahue MartinezAún no hay calificaciones
- Darwin - Chindoy 243005 - 16Documento13 páginasDarwin - Chindoy 243005 - 16Dayan VillanuevaAún no hay calificaciones
- Tema 7 UnlockedDocumento34 páginasTema 7 UnlockedMartín Ezequiel Pedrozo RocaAún no hay calificaciones
- Capitulo4TC 2007Documento21 páginasCapitulo4TC 2007Nabor Alfredo Labias DiazAún no hay calificaciones
- Examen Ordinario I. Control JAMCDocumento14 páginasExamen Ordinario I. Control JAMCStephanie Daniela Velázquez PérezAún no hay calificaciones
- Trabajo Ecuaciones DiferencialesDocumento33 páginasTrabajo Ecuaciones DiferencialesAngelo reaAún no hay calificaciones
- Actividad 5 (Contestada)Documento9 páginasActividad 5 (Contestada)Anonymous tbaehY0FAún no hay calificaciones
- Capitulo4TC 2007Documento21 páginasCapitulo4TC 2007Nabor Alfredo Labias DiazAún no hay calificaciones
- ExpointegradorDocumento1 páginaExpointegradorAndres GenoyAún no hay calificaciones
- Informe Lab 2 Señales - Daniel Torres - Manuel VergaraDocumento15 páginasInforme Lab 2 Señales - Daniel Torres - Manuel VergaraAndres GenoyAún no hay calificaciones
- Ultimo Taller SeñalesDocumento5 páginasUltimo Taller SeñalesAndres GenoyAún no hay calificaciones
- Introducción 2Documento1 páginaIntroducción 2Andres GenoyAún no hay calificaciones
- Guia Primera Parte - Bode FinalDocumento12 páginasGuia Primera Parte - Bode FinalAndres GenoyAún no hay calificaciones
- Anatomia Cruz RojaDocumento30 páginasAnatomia Cruz RojaJordan Moss100% (1)
- PafiDocumento5 páginasPafiHI CAAún no hay calificaciones
- S03.s2 Ley de GausDocumento13 páginasS03.s2 Ley de GausSegundo Estela CubasAún no hay calificaciones
- Planeación y Urbanismo. MesoamericaDocumento12 páginasPlaneación y Urbanismo. MesoamericaKaryRodzAún no hay calificaciones
- Extraccion de ADN - PlatanoDocumento13 páginasExtraccion de ADN - PlatanoCarlos Roncal Narváez0% (1)
- Capítulo 9. TEORIA DE INVENTARIOS o STOCK.Documento19 páginasCapítulo 9. TEORIA DE INVENTARIOS o STOCK.naru 802Aún no hay calificaciones
- Tratado Sobre DineroDocumento10 páginasTratado Sobre DineromartinAún no hay calificaciones
- Escuelas Arriba 5to Año Básico 2021Documento3 páginasEscuelas Arriba 5to Año Básico 2021María Eugenia Lara PonceAún no hay calificaciones
- Teoria Errores USSDocumento18 páginasTeoria Errores USSpiero medinaAún no hay calificaciones
- Paper Material AutorreparablesDocumento2 páginasPaper Material AutorreparablesDanny Acosta FrayleAún no hay calificaciones
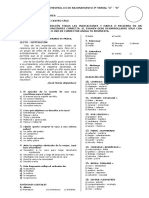
- Exam Bimes Iii 3° Raz Verb 08-10-20Documento2 páginasExam Bimes Iii 3° Raz Verb 08-10-20Yenny Samil CbAún no hay calificaciones
- Que Es ODDocumento3 páginasQue Es ODKeviin LopezAún no hay calificaciones
- Unidad IVDocumento46 páginasUnidad IVAndrea Gerl8ngAún no hay calificaciones
- EL MilagroDocumento64 páginasEL MilagroHija De La LunaAún no hay calificaciones
- Mademsa Ventti 460 B Plus DryerDocumento14 páginasMademsa Ventti 460 B Plus DryerSusanaGulppiPintoAún no hay calificaciones
- Alucinógenos y DrogasDocumento12 páginasAlucinógenos y DrogasJ ZitO Esencia MusicalAún no hay calificaciones
- El Corto de Loja 24 08 2016Documento48 páginasEl Corto de Loja 24 08 2016JoséAndrésOrtizCuestaAún no hay calificaciones
- Esquiosmolaridad Entre Compartimientos Extra e IntracelularesDocumento5 páginasEsquiosmolaridad Entre Compartimientos Extra e IntracelularesAlexandra TapiaAún no hay calificaciones
- Estudio de Impacto AmbientalDocumento12 páginasEstudio de Impacto AmbientalYersin Edison Machacuay CrispinAún no hay calificaciones
- 9.manejo de ResiduosDocumento6 páginas9.manejo de ResiduosCONSORCIO ANDRES 2020Aún no hay calificaciones
- NefrologiaDocumento78 páginasNefrologiaEnmanuel PayanoAún no hay calificaciones
- Reto 7-2Documento1 páginaReto 7-2LUIS ALFONSOAún no hay calificaciones
- 5 .Clase Belting Muerte-Hans-BeltingDocumento16 páginas5 .Clase Belting Muerte-Hans-BeltingEne Jota HoyAún no hay calificaciones
- PreguntasDocumento5 páginasPreguntasVictor GutierrezAún no hay calificaciones
- Formulario C1 ManufacturaDocumento2 páginasFormulario C1 ManufacturaLeonel David Quinteros PalominosAún no hay calificaciones
- JuntasDocumento12 páginasJuntasPamela HernandezAún no hay calificaciones
- SPA-1998-10-25-2 La Venida Del Senor Con Las nubes-SANCL-EDITADODocumento52 páginasSPA-1998-10-25-2 La Venida Del Senor Con Las nubes-SANCL-EDITADOAlexandra Valencia100% (1)
- S1.2 Actividad Aplicativa 02 Caso Shell - ESPDocumento7 páginasS1.2 Actividad Aplicativa 02 Caso Shell - ESPVladimir Noriega ChingAún no hay calificaciones