También podría gustarte
- Sistema SCADADocumento18 páginasSistema SCADAGreogerAún no hay calificaciones
- Telecontrol Unidad 1Documento18 páginasTelecontrol Unidad 1Eduard CarrasquillaAún no hay calificaciones
- Control SupervisorioDocumento5 páginasControl SupervisorioOscar U0699Aún no hay calificaciones
- Sistemas ScadaDocumento13 páginasSistemas ScadaPablo Javier TarullaAún no hay calificaciones
- Orlando Rodriguez SCADA y Control DistribuidoDocumento11 páginasOrlando Rodriguez SCADA y Control DistribuidoORLANDO RODRIGUEZAún no hay calificaciones
- Historia ScadaDocumento4 páginasHistoria ScadaDiego OrocolloAún no hay calificaciones
- C3 Sistemas SCADADocumento11 páginasC3 Sistemas SCADAOmar Milián MorónAún no hay calificaciones
- Curso Basico de ScadaDocumento37 páginasCurso Basico de Scadakafeco88100% (1)
- Sistema de PotenciaDocumento23 páginasSistema de PotenciaFernando Jordy Fernando Jordy Palomino NAún no hay calificaciones
- Curso de Sistemas SCADADocumento43 páginasCurso de Sistemas SCADAÁsgeirr Ánsgar Ósgar Canuro100% (1)
- Capitulo 2Documento21 páginasCapitulo 2ghodghod123Aún no hay calificaciones
- SCADADocumento65 páginasSCADABrayan MisaelAún no hay calificaciones
- Sistema SCADADocumento8 páginasSistema SCADAJim Michael Nowell100% (1)
- Componentes de Un Sistema SCADADocumento9 páginasComponentes de Un Sistema SCADAJorge SandokanAún no hay calificaciones
- Definición y fundamentos de un SCADADocumento40 páginasDefinición y fundamentos de un SCADASebastián LombardoAún no hay calificaciones
- Sistemas SCADA: qué son, componentes y ventajasDocumento24 páginasSistemas SCADA: qué son, componentes y ventajasAbel JmcAún no hay calificaciones
- Edgar Trujillo 203052A 954 Etapa 2Documento19 páginasEdgar Trujillo 203052A 954 Etapa 2Jorge Eunveiman Galindo ParraAún no hay calificaciones
- Asignatura:: Automatización de Sistemas de ProducciónDocumento12 páginasAsignatura:: Automatización de Sistemas de ProducciónKarol OrtegaAún no hay calificaciones
- Sistema ScadaDocumento6 páginasSistema ScadaLLUIS ANTONIO QUISPE FLORESAún no hay calificaciones
- Sistema ScadaDocumento15 páginasSistema ScadaYEISON HUARACHA TUPACAún no hay calificaciones
- Trabajo Práctico Nº10 - Sistemas SCADA (Bautista Gerardo Nicolás)Documento11 páginasTrabajo Práctico Nº10 - Sistemas SCADA (Bautista Gerardo Nicolás)Nicolas BautistaAún no hay calificaciones
- Sistemas SCADA: Control y monitoreo industrial remoto enDocumento4 páginasSistemas SCADA: Control y monitoreo industrial remoto enJuan NarváezAún no hay calificaciones
- Grupo3 - Etapa 2Documento19 páginasGrupo3 - Etapa 2carlosmereAún no hay calificaciones
- Control asistido por computadora: Sistemas DCS, SCADA y DDCDocumento16 páginasControl asistido por computadora: Sistemas DCS, SCADA y DDCCesar AndradeAún no hay calificaciones
- TEMA 6.1,6.2 Sistemas ScadaDocumento15 páginasTEMA 6.1,6.2 Sistemas ScadaDaniel Eduardo JrzAún no hay calificaciones
- SCADA Texto1Documento15 páginasSCADA Texto1chinojhon3193Aún no hay calificaciones
- Funciones Básicas de Un Sistema SCADADocumento36 páginasFunciones Básicas de Un Sistema SCADAKamila CosmeticosAún no hay calificaciones
- Investigacion Sobre El Sistema SCADADocumento6 páginasInvestigacion Sobre El Sistema SCADAJhonny Zurita GonzalesAún no hay calificaciones
- Sistema SCADA: Definición, historia y funcionamientoDocumento29 páginasSistema SCADA: Definición, historia y funcionamientorichard CedenoAún no hay calificaciones
- U-5 Control Asistido Por ComputadoraDocumento17 páginasU-5 Control Asistido Por ComputadoraGerman Rodriguez100% (3)
- Datos Relevantes Extraídos Del TextoDocumento3 páginasDatos Relevantes Extraídos Del TextoVíctor TejadaAún no hay calificaciones
- Blog SEMANA 7Documento7 páginasBlog SEMANA 7JOE NEIL LAUREANOAún no hay calificaciones
- Sistema ScadaDocumento24 páginasSistema ScadaBony DiazgAún no hay calificaciones
- 1.1 - Reporte de Una Investigación - 1986943Documento7 páginas1.1 - Reporte de Una Investigación - 1986943renee cayeros garciaAún no hay calificaciones
- Redes de Procesos IndustrialesDocumento23 páginasRedes de Procesos IndustrialesAlejandro ColinaAún no hay calificaciones
- LaboratorioDocumento91 páginasLaboratorioSayda VillanuevaAún no hay calificaciones
- SCADADocumento6 páginasSCADAedwinAún no hay calificaciones
- Sistema SCADA EGEMSADocumento18 páginasSistema SCADA EGEMSAAnonymous MMLzZjby0% (1)
- Foro Curso Control Pro Ind A ScadaDocumento8 páginasForo Curso Control Pro Ind A ScadaNoemi Huancas CorreaAún no hay calificaciones
- Sistemas ScadaDocumento51 páginasSistemas ScadaAlex CadAún no hay calificaciones
- Grupo 299020 12Documento44 páginasGrupo 299020 12Josep Alexander Gutierrez Reyes100% (1)
- Sistemas de Control SCADADocumento6 páginasSistemas de Control SCADAMiguel SosaAún no hay calificaciones
- Act-15 Lectura Reconocimiento U3Documento11 páginasAct-15 Lectura Reconocimiento U3JavierAún no hay calificaciones
- Clase Sistemas SCADADocumento22 páginasClase Sistemas SCADAJavier Alexis Arriagada AcevedoAún no hay calificaciones
- Proyecto DigitalesDocumento13 páginasProyecto DigitalesJoanna GoncalvezAún no hay calificaciones
- Sistema Scada, SCD y PLCDocumento13 páginasSistema Scada, SCD y PLCFelix Linares Moruna100% (1)
- Scada IDocumento18 páginasScada IVicente Melchor RamírezAún no hay calificaciones
- TELEMETRIA - SCADA Y DCS (1) - PrintDocumento33 páginasTELEMETRIA - SCADA Y DCS (1) - PrintEduardo Ramirez GonzalezAún no hay calificaciones
- Sistema ScadaDocumento59 páginasSistema ScadaSonia Vega BarrantesAún no hay calificaciones
- Fase 1 - Deivy Faviany Vanegas VásquezDocumento28 páginasFase 1 - Deivy Faviany Vanegas VásquezDeivy Vanegas100% (1)
- LAB2Documento11 páginasLAB2Almendra Pichilingue PasacheAún no hay calificaciones
- Introducción A Los Sistemas SCADA - AAHDocumento3 páginasIntroducción A Los Sistemas SCADA - AAHZeldronAún no hay calificaciones
- Trabajo 1Documento23 páginasTrabajo 1Luis AlvarezAún no hay calificaciones
- Foro Calificado 3Documento2 páginasForo Calificado 3Romi Arenas Bustinza100% (1)
- SCADA y definición de RTU y MTUDocumento7 páginasSCADA y definición de RTU y MTUHaner Gonzalez ApresaAún no hay calificaciones
- Exposicion Grupo 5 SCADADocumento34 páginasExposicion Grupo 5 SCADAJuank UpsAún no hay calificaciones
- Instalación de equipos y elementos de sistemas de automatización industrial. ELEM0311De EverandInstalación de equipos y elementos de sistemas de automatización industrial. ELEM0311Calificación: 2 de 5 estrellas2/5 (1)
- Puesta en marcha de sistemas de automatización industrial. ELEM0311De EverandPuesta en marcha de sistemas de automatización industrial. ELEM0311Calificación: 3 de 5 estrellas3/5 (1)
- Mantenimiento de infraestructuras de redes locales de datos. ELES0209De EverandMantenimiento de infraestructuras de redes locales de datos. ELES0209Aún no hay calificaciones
- Mantenimiento preventivo de sistemas de automatización industrial. ELEM0311De EverandMantenimiento preventivo de sistemas de automatización industrial. ELEM0311Calificación: 4.5 de 5 estrellas4.5/5 (2)
- Practica 2 MotorDocumento5 páginasPractica 2 MotorRodrigo MéndezAún no hay calificaciones
- Practica 1 Identificacion de ColoresDocumento5 páginasPractica 1 Identificacion de ColoresRodrigo MéndezAún no hay calificaciones
- Investigación POTDocumento11 páginasInvestigación POTRodrigo MéndezAún no hay calificaciones
- PRACTICA 5 FuncionesDocumento4 páginasPRACTICA 5 FuncionesRodrigo MéndezAún no hay calificaciones
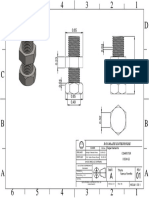
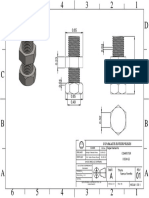
- Tornillo Hexagonal RodrigoDocumento2 páginasTornillo Hexagonal RodrigoRodrigo MéndezAún no hay calificaciones
- Proyecto de DomoticaDocumento20 páginasProyecto de DomoticaRodrigo MéndezAún no hay calificaciones
- Funciones AmplificadoresDocumento14 páginasFunciones AmplificadoresRodrigo MéndezAún no hay calificaciones
- Control ON-OFF TemperaturaDocumento34 páginasControl ON-OFF TemperaturaRodrigo MéndezAún no hay calificaciones
- Ensamble TornilloDocumento1 páginaEnsamble TornilloRodrigo MéndezAún no hay calificaciones
- Ensamble Tornillo - TuercaDocumento1 páginaEnsamble Tornillo - TuercaRodrigo MéndezAún no hay calificaciones
- SM G531F Pspec 2Documento29 páginasSM G531F Pspec 2Daniel Mauricio BoteroAún no hay calificaciones
- CASO1 ImprimirDocumento27 páginasCASO1 ImprimirJessy Oropeza0% (1)
- Cuadro SQA-NHDocumento4 páginasCuadro SQA-NHVivi SanchezAún no hay calificaciones
- Diagrama de ClasesDocumento3 páginasDiagrama de Clasesrabito54250% (1)
- Origen y Conceptos Claves de Los Sistemas DistribuidosDocumento4 páginasOrigen y Conceptos Claves de Los Sistemas DistribuidosCursos uniAún no hay calificaciones
- OdometríaDocumento20 páginasOdometríaEnriqueAún no hay calificaciones
- Jeroglíficos Egipcios Por DesarrollosDGDocumento3 páginasJeroglíficos Egipcios Por DesarrollosDGPaola IrizagaAún no hay calificaciones
- Articulo Sobre El OEEDocumento3 páginasArticulo Sobre El OEEJulián AriasAún no hay calificaciones
- KUKA Programación Experto EsDocumento219 páginasKUKA Programación Experto EsRoberto Rodriguez UnimateAún no hay calificaciones
- M Gint f046 Solicitud de Reembolsos MédicosDocumento2 páginasM Gint f046 Solicitud de Reembolsos MédicosNora0% (1)
- P - Cuestionario Autoevaluacion Uc0473 - 3Documento4 páginasP - Cuestionario Autoevaluacion Uc0473 - 3Germán SanchisAún no hay calificaciones
- La Gestión Del Tiempo - Luis ArimanyDocumento39 páginasLa Gestión Del Tiempo - Luis ArimanyCristianAún no hay calificaciones
- lx1226 1Documento2 páginaslx1226 1thebailarina manAún no hay calificaciones
- Unidad 01 - Repaso de Arquitectura e IntroducciónDocumento39 páginasUnidad 01 - Repaso de Arquitectura e IntroducciónRafael ValdiviesoAún no hay calificaciones
- Ensayo de Las TicDocumento92 páginasEnsayo de Las TicNahomy DelgadoAún no hay calificaciones
- Foro 1 PDFDocumento4 páginasForo 1 PDFestefano orozcoAún no hay calificaciones
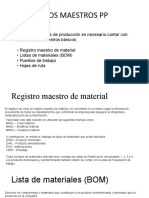
- Datos Maestros PPDocumento6 páginasDatos Maestros PPCarlos Alberto Márquez OrozcoAún no hay calificaciones
- Iniciación a la domótica: elementos, sistemas e instalaciónDocumento70 páginasIniciación a la domótica: elementos, sistemas e instalaciónSuperCoC 12Aún no hay calificaciones
- Normas APPADocumento33 páginasNormas APPAAlejandroxd45Aún no hay calificaciones
- HelloJM AuthGuide NCon Mob CO ESDocumento11 páginasHelloJM AuthGuide NCon Mob CO ESPablo FlorezAún no hay calificaciones
- Definiciones de ReportesDocumento4 páginasDefiniciones de ReportesOscarSaavedraAún no hay calificaciones
- (Alumno) 1er Inventario Final o de Cierre (Desarrollo)Documento4 páginas(Alumno) 1er Inventario Final o de Cierre (Desarrollo)MARCO GUIMARAY ROMEROAún no hay calificaciones
- Problemas Control Digital Primer ParcialDocumento39 páginasProblemas Control Digital Primer Parcialcarlos garciaAún no hay calificaciones
- Instalación Cliente VPN FortinetDocumento12 páginasInstalación Cliente VPN FortinetJhon Jairo AcostaAún no hay calificaciones
- Anexo 2 Formato Entrega Tarea2Documento8 páginasAnexo 2 Formato Entrega Tarea2ivanherranandradeAún no hay calificaciones
- Exposicion Guia de RemisionDocumento16 páginasExposicion Guia de Remisionveronica cerdeña correaAún no hay calificaciones
- 2020 03 28 10 18 16 Esanchez2342 A Solicitud de Empleo EST PDFDocumento2 páginas2020 03 28 10 18 16 Esanchez2342 A Solicitud de Empleo EST PDFDylan ChagalaAún no hay calificaciones
- Pasos para Instalar VB 2010 ExpressDocumento14 páginasPasos para Instalar VB 2010 Expressmdianes2711Aún no hay calificaciones
- SiteScope - Activar JMX ConsoleDocumento3 páginasSiteScope - Activar JMX ConsoleAscención Solano PallaresAún no hay calificaciones
- Switching IiDocumento30 páginasSwitching IiABRAHAM TIBERIO LAREZAún no hay calificaciones