También podría gustarte
- Plantas de EmergenciaDocumento15 páginasPlantas de EmergenciaJose Miguel Puc TotosaoAún no hay calificaciones
- Modelo gestión mantenimiento motores eléctricos laminador caliente SidorDocumento201 páginasModelo gestión mantenimiento motores eléctricos laminador caliente SidorPabloCanalesJaraAún no hay calificaciones
- Trabajo Instalaciones Eléctricas ResidencialesDocumento20 páginasTrabajo Instalaciones Eléctricas Residencialesfabian_ortega_51Aún no hay calificaciones
- 01 Generalidades de Los Sistemas de Subtransmision y Distribucion.Documento21 páginas01 Generalidades de Los Sistemas de Subtransmision y Distribucion.Gerson Lemus GarciaAún no hay calificaciones
- Tableros de BlindadoDocumento19 páginasTableros de BlindadoVictor CobAún no hay calificaciones
- Niveles de AutomatizacionDocumento10 páginasNiveles de AutomatizacionJulian MartinezAún no hay calificaciones
- GalvanometroDocumento7 páginasGalvanometroLilian VerasteguiAún no hay calificaciones
- 5 Diseño de CarcamosDocumento15 páginas5 Diseño de CarcamosEduardo Tello del PinoAún no hay calificaciones
- Cálculo de circuitos eléctricos en vivienda unifamiliar de 140 m2Documento47 páginasCálculo de circuitos eléctricos en vivienda unifamiliar de 140 m2Pablo GonzalezAún no hay calificaciones
- Sistema Eléctrico Del EcuadorDocumento71 páginasSistema Eléctrico Del EcuadorEdwin JachoAún no hay calificaciones
- Unidad 5 Eq Subestaciones El TransformadorDocumento12 páginasUnidad 5 Eq Subestaciones El TransformadorDouglas De La BarraAún no hay calificaciones
- Instalacion de Redes Aereas y Subterraneas de Energia ElectricaDocumento11 páginasInstalacion de Redes Aereas y Subterraneas de Energia ElectricaEdison Junior100% (1)
- Redes Monofásicas y TrifásicasDocumento5 páginasRedes Monofásicas y TrifásicasSilvio GomesAún no hay calificaciones
- Ensayo VentosasDocumento5 páginasEnsayo VentosasJhonatan MartinezAún no hay calificaciones
- Domótica - Inmótica LCN.52Documento10 páginasDomótica - Inmótica LCN.52jdelacruz010480Aún no hay calificaciones
- Energía Hidráulica GeneracionDocumento22 páginasEnergía Hidráulica GeneracionEngel AdriAún no hay calificaciones
- Metrados electricos: guia practicaDocumento19 páginasMetrados electricos: guia practicaCruzhita FiorehAún no hay calificaciones
- Sintonización de Controladores PIDDocumento17 páginasSintonización de Controladores PIDRonaldo Luis Guao BolañoAún no hay calificaciones
- EstaqueoDocumento14 páginasEstaqueoJorgito PacaraAún no hay calificaciones
- Bancos de CondensadoresDocumento3 páginasBancos de CondensadoresNiltonGonzalesAún no hay calificaciones
- VDF Motores SumergiblesDocumento2 páginasVDF Motores SumergiblesCristian RAAún no hay calificaciones
- EEEA01 U1 PresentaciónDocumento47 páginasEEEA01 U1 PresentaciónRicardo German Contreras RoaAún no hay calificaciones
- Buses, Seccionadores e Interruptores.Documento6 páginasBuses, Seccionadores e Interruptores.Cristian Emanuel Roman LopezAún no hay calificaciones
- INTRODUCCION GENERALIDADES Rev 1 PDFDocumento50 páginasINTRODUCCION GENERALIDADES Rev 1 PDFChristian Andres100% (2)
- Resumen Circuitos TrifasicosDocumento35 páginasResumen Circuitos TrifasicosNicolás CoelloAún no hay calificaciones
- Distancias MinimasDocumento39 páginasDistancias MinimasJeanfranco TiradoAún no hay calificaciones
- Actividad 2 de Maquinas Electricas RotativasDocumento13 páginasActividad 2 de Maquinas Electricas RotativasJulio Torres100% (1)
- Válvulas ventosas aguas limpiasDocumento13 páginasVálvulas ventosas aguas limpiaskatrinAún no hay calificaciones
- UT 1 Cap1 Conceptos Basicos PDFDocumento35 páginasUT 1 Cap1 Conceptos Basicos PDFViktor StarkAún no hay calificaciones
- Centrales termoeléctricas o plantas de vaporDocumento40 páginasCentrales termoeléctricas o plantas de vaporAlan SantosAún no hay calificaciones
- Elementos de Control y Protección de MotoresDocumento8 páginasElementos de Control y Protección de Motoresadiel leonAún no hay calificaciones
- Módulo VII - Motores Comb - InternaDocumento31 páginasMódulo VII - Motores Comb - InternaRenzo NobileAún no hay calificaciones
- Mantenimiento de Equipo ElectricoDocumento54 páginasMantenimiento de Equipo Electricogtrin15Aún no hay calificaciones
- Flujo de carga UES El SalvadorDocumento14 páginasFlujo de carga UES El SalvadorNestor VasquezAún no hay calificaciones
- Implementacion de PWM MonofasicoDocumento20 páginasImplementacion de PWM MonofasicoJose Daniel FloresAún no hay calificaciones
- Uso FinalDocumento30 páginasUso Finalshirly yanelli coronado garciaAún no hay calificaciones
- Actuadores eléctricos: DC, paso a paso y ACDocumento9 páginasActuadores eléctricos: DC, paso a paso y ACBriannda MoralessAún no hay calificaciones
- Clase 1 CentralesDocumento53 páginasClase 1 CentralesDaniel MolinaAún no hay calificaciones
- Salidas de Enganche y DesengancheDocumento6 páginasSalidas de Enganche y DesengancheferbuifoAún no hay calificaciones
- 2.1 Modelos Matemáticos de Sistemas Físicos - EléctricosDocumento18 páginas2.1 Modelos Matemáticos de Sistemas Físicos - EléctricosBere OlmosAún no hay calificaciones
- Examen Primer Parcial CentralesDocumento3 páginasExamen Primer Parcial CentralesJean Carla CaralAún no hay calificaciones
- Flujo potencia análisisDocumento1 páginaFlujo potencia análisisjose_love_1990Aún no hay calificaciones
- Representacion de SistemasDocumento11 páginasRepresentacion de SistemasfedeAún no hay calificaciones
- InstalacionesDocumento51 páginasInstalacionesCarlosAún no hay calificaciones
- Transformadores de medida ML-313Documento22 páginasTransformadores de medida ML-313Shecella Cordero CordovaAún no hay calificaciones
- (PDF) Guía de Aprendizaje 1 (Diseño de Instalaciones Eléctricas) - SENADocumento17 páginas(PDF) Guía de Aprendizaje 1 (Diseño de Instalaciones Eléctricas) - SENAINSTRUCTOR DIBUJO ARQUITECTONICOAún no hay calificaciones
- Automatización de Un Semáforo Por PLC PDFDocumento14 páginasAutomatización de Un Semáforo Por PLC PDFLuis Sanchez CorreaAún no hay calificaciones
- Telecontrol Unidad 1Documento18 páginasTelecontrol Unidad 1Eduard CarrasquillaAún no hay calificaciones
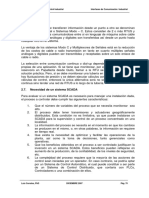
- Sistemas Scada IntroduccionDocumento57 páginasSistemas Scada Introduccionbryan cuevaAún no hay calificaciones
- Scada IDocumento18 páginasScada IVicente Melchor RamírezAún no hay calificaciones
- Curso Basico de ScadaDocumento37 páginasCurso Basico de Scadakafeco88100% (1)
- Sistema ScadaDocumento59 páginasSistema ScadaAlvaro GarciiaAún no hay calificaciones
- PARTE 2-Páginas-33-34Documento2 páginasPARTE 2-Páginas-33-34Juan LorenzoAún no hay calificaciones
- ScadaDocumento17 páginasScadaAlvaro AndradeAún no hay calificaciones
- Sistema ScadaDocumento59 páginasSistema ScadaSonia Vega BarrantesAún no hay calificaciones
- Introducción al SCADADocumento50 páginasIntroducción al SCADAGaray Nieto TaylorAún no hay calificaciones
- Curso de Sistemas SCADADocumento43 páginasCurso de Sistemas SCADAÁsgeirr Ánsgar Ósgar Canuro100% (1)
- SCADADocumento9 páginasSCADAJesúsAún no hay calificaciones
- C3 Sistemas SCADADocumento11 páginasC3 Sistemas SCADAOmar Milián MorónAún no hay calificaciones
- Plataforma Scada Primera UnidadDocumento54 páginasPlataforma Scada Primera UnidadEsteban ÁlvarezAún no hay calificaciones
- Reglamento de Operaciones RdoDocumento31 páginasReglamento de Operaciones RdoJorge Sandokan100% (1)
- 2.-BBPP - Informe SemanalDocumento7 páginas2.-BBPP - Informe SemanalJorge SandokanAún no hay calificaciones
- MEDICION DE MALLA A TIERRA SED, ProyectoDocumento8 páginasMEDICION DE MALLA A TIERRA SED, ProyectoJorge SandokanAún no hay calificaciones
- CG040-ER-ES-C-002-0-Diseño y Estudio MPaTDocumento18 páginasCG040-ER-ES-C-002-0-Diseño y Estudio MPaTJorge SandokanAún no hay calificaciones
- Guía IEEE de puesta a tierra en subestaciones enDocumento99 páginasGuía IEEE de puesta a tierra en subestaciones enRonald Malave94% (47)
- NochacoDocumento1 páginaNochacoJorge SandokanAún no hay calificaciones
- CG050-ER-ES-001-Resistividad de TerrenoDocumento12 páginasCG050-ER-ES-001-Resistividad de TerrenoJorge SandokanAún no hay calificaciones
- PT ZT-ZDDocumento16 páginasPT ZT-ZDJorge SandokanAún no hay calificaciones
- Brochure WPH 2022Documento16 páginasBrochure WPH 2022Jorge SandokanAún no hay calificaciones
- FactibilidadDocumento1 páginaFactibilidadJorge SandokanAún no hay calificaciones
- Informe de Interrupcion de SuministroDocumento3 páginasInforme de Interrupcion de SuministroJorge SandokanAún no hay calificaciones
- Configuracin Interruptor y Medio de Una Subestacin ElctricaDocumento1 páginaConfiguracin Interruptor y Medio de Una Subestacin ElctricaJorge SandokanAún no hay calificaciones
- Texto Definitivo CPR 2022 + TapasDocumento178 páginasTexto Definitivo CPR 2022 + TapasCarlos Reyes Piérola81% (31)
- Diseño de malla de puesta a tierra para central híbridaDocumento20 páginasDiseño de malla de puesta a tierra para central híbridaJorge SandokanAún no hay calificaciones
- Reporte Historial TecnicoDocumento6 páginasReporte Historial TecnicoJorge SandokanAún no hay calificaciones
- Anexo Técnico Desarrollo Auditorías TécnicasDocumento7 páginasAnexo Técnico Desarrollo Auditorías TécnicasLuis Alonso FigueroaAún no hay calificaciones
- Diseode Sistemasde Puestaa TierraDocumento14 páginasDiseode Sistemasde Puestaa TierraEdward RinconAún no hay calificaciones
- CG-GN-LI-C-003-1-Cuadro Itemizado Obras EléctricasDocumento1 páginaCG-GN-LI-C-003-1-Cuadro Itemizado Obras EléctricasJorge SandokanAún no hay calificaciones
- Texto Definitivo CPR 2022 + TapasDocumento178 páginasTexto Definitivo CPR 2022 + TapasCarlos Reyes Piérola81% (31)
- Proteccion CDA de TanquesDocumento9 páginasProteccion CDA de Tanquesshfederico-1100% (1)
- TodoDocumento1 páginaTodoJorge SandokanAún no hay calificaciones
- Estructuras Patio MT - Vistas y Cortes Básicos 1Documento1 páginaEstructuras Patio MT - Vistas y Cortes Básicos 1Jorge SandokanAún no hay calificaciones
- SC Subsidio Ley 21423 - 062022Documento20 páginasSC Subsidio Ley 21423 - 062022Jorge SandokanAún no hay calificaciones
- EMPALMES AÉREOS MONOFÁSICOS BT - en PosteDocumento12 páginasEMPALMES AÉREOS MONOFÁSICOS BT - en PosteJorge SandokanAún no hay calificaciones
- 16 Superflexrvk1Documento6 páginas16 Superflexrvk1Jorge SandokanAún no hay calificaciones
- SsaaDocumento1 páginaSsaaJorge SandokanAún no hay calificaciones
- NTSyCS Sept20 PDFDocumento145 páginasNTSyCS Sept20 PDFAngelica Escobar MorenoAún no hay calificaciones
- Instrucciones de Pago SAESADocumento2 páginasInstrucciones de Pago SAESAJorge SandokanAún no hay calificaciones
- RecoDocumento1 páginaRecoJorge SandokanAún no hay calificaciones
- Exigencias Mínimas de Diseño de Instalaciones de Transmisión PDFDocumento60 páginasExigencias Mínimas de Diseño de Instalaciones de Transmisión PDFfreddyAún no hay calificaciones
- Reporte Práctica 3Documento21 páginasReporte Práctica 3Gamer Spartan11Aún no hay calificaciones
- Tema 1 STDocumento10 páginasTema 1 STSALVADOR GARCIA LUQUEAún no hay calificaciones
- Actividades - Tercer ParcialDocumento2 páginasActividades - Tercer ParcialJose RicardoAún no hay calificaciones
- Tema 1.2-B Fallas de Los Dispositivos PerifericosDocumento3 páginasTema 1.2-B Fallas de Los Dispositivos Perifericosobed Dominguez lopezAún no hay calificaciones
- Modulo 1: Componentes Eléctricos de Estado Sólido: Curso: Electricidad Ii 12 Material Del EstudianteDocumento27 páginasModulo 1: Componentes Eléctricos de Estado Sólido: Curso: Electricidad Ii 12 Material Del EstudiantecleverAún no hay calificaciones
- Arquitectura de ComputadoresDocumento8 páginasArquitectura de ComputadoresWillianny TorresAún no hay calificaciones
- IotDocumento94 páginasIotHéctor GuzmanAún no hay calificaciones
- Mini Circuito UPS AvanzadoDocumento5 páginasMini Circuito UPS AvanzadohERNANDO Salazar RincomAún no hay calificaciones
- Certificación de Redes de Cableado EstructuradoDocumento3 páginasCertificación de Redes de Cableado EstructuradoJOHANA100% (1)
- Los PerifericosDocumento4 páginasLos PerifericosCecy AnteAún no hay calificaciones
- 02 Corte y SaturacionDocumento9 páginas02 Corte y SaturacionTatiana CaceresAún no hay calificaciones
- Programación Modulares 2017Documento7 páginasProgramación Modulares 2017ingridAún no hay calificaciones
- Evolucion de So Windows PDFDocumento2 páginasEvolucion de So Windows PDFJuan Pablo Cusi CachagaAún no hay calificaciones
- Sensor de TemperaturaDocumento9 páginasSensor de TemperaturaDeivis Claison Saldana TorresAún no hay calificaciones
- BT-Q818XT-User Guide-ESDocumento8 páginasBT-Q818XT-User Guide-ESalejandro jimenezAún no hay calificaciones
- Topología de Las RedesDocumento11 páginasTopología de Las RedesAriadna BaptistaAún no hay calificaciones
- Fuente de Poder 11°F - by SlidesgoDocumento22 páginasFuente de Poder 11°F - by SlidesgoKeren CuestasAún no hay calificaciones
- Guía para participantes en WebinarsDocumento2 páginasGuía para participantes en Webinarsmoymm22Aún no hay calificaciones
- MecanografiaDocumento7 páginasMecanografiaLuis SanchezAún no hay calificaciones
- Duplicador, Triplicador y Cuatriplicador de VoltajeDocumento7 páginasDuplicador, Triplicador y Cuatriplicador de VoltajeJose Francisco Valdez BautistaAún no hay calificaciones
- Mantenimiento Preventivo y CorrectivoDocumento80 páginasMantenimiento Preventivo y CorrectivoFrancisca Quiliche Chavez100% (2)
- SNMP OidDocumento2 páginasSNMP OidMauricio AbregúAún no hay calificaciones
- Historia y evolución de la computaciónDocumento14 páginasHistoria y evolución de la computaciónEfren Martin Ortiz LopezAún no hay calificaciones
- Insite GoldDocumento29 páginasInsite GoldjoelbravobritoAún no hay calificaciones
- MB Manual Ga-870a-Ud3 v3.0 EsDocumento27 páginasMB Manual Ga-870a-Ud3 v3.0 EsFernando HurtadoAún no hay calificaciones
- Examen T3Documento4 páginasExamen T3martinAún no hay calificaciones
- Julio Enrique Villacorta Portillo 080223Documento9 páginasJulio Enrique Villacorta Portillo 080223Soporte TecnicoAún no hay calificaciones
- Practicas 4 5 6 7Documento23 páginasPracticas 4 5 6 7ElKevingol100% (1)
- Puntos de FuncionDocumento42 páginasPuntos de FuncionElias CassalAún no hay calificaciones
- Diseñe Un Circuito para Un Transistor NPN 2N3904 en Configuración de Emisor Común, Polarización Con Divisor de Tensión y Resistencia de Emisor.Documento5 páginasDiseñe Un Circuito para Un Transistor NPN 2N3904 en Configuración de Emisor Común, Polarización Con Divisor de Tensión y Resistencia de Emisor.Sebastian Hache RodriguezAún no hay calificaciones