También podría gustarte
- UF1217 - Mantenimiento de sistemas auxiliares del motor de ciclo dieselDe EverandUF1217 - Mantenimiento de sistemas auxiliares del motor de ciclo dieselCalificación: 3.5 de 5 estrellas3.5/5 (3)
- Motores MarinosDocumento10 páginasMotores MarinosdarkevildemonzxAún no hay calificaciones
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209De EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Calificación: 1 de 5 estrellas1/5 (2)
- Guía de selección motores y actuadores para ArduinoDocumento17 páginasGuía de selección motores y actuadores para ArduinoEstefanía RománAún no hay calificaciones
- UF1214 - Mantenimiento de motores térmicos de dos y cuatro tiemposDe EverandUF1214 - Mantenimiento de motores térmicos de dos y cuatro tiemposCalificación: 5 de 5 estrellas5/5 (1)
- Funcionamiento de TransmisionDocumento11 páginasFuncionamiento de Transmisionadolf espinozaAún no hay calificaciones
- UF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoDe EverandUF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoCalificación: 4 de 5 estrellas4/5 (4)
- Documento MotorDocumento6 páginasDocumento MotorÎvëř ŠăňtāňdëřAún no hay calificaciones
- 100 Circuitos de Shields para MotoresDe Everand100 Circuitos de Shields para MotoresCalificación: 4.5 de 5 estrellas4.5/5 (4)
- Par Motor TopicosDocumento3 páginasPar Motor TopicosSegundo GarcesAún no hay calificaciones
- 03 - Guía de Apoyo N°5, Curvas Caraterísticas en Motores de Combustión InternaDocumento4 páginas03 - Guía de Apoyo N°5, Curvas Caraterísticas en Motores de Combustión InternaLuis AlejandroAún no hay calificaciones
- Practica 13Documento6 páginasPractica 13MARIA LOURDES SILVA GARCIAAún no hay calificaciones
- 25 PreguntasDocumento8 páginas25 PreguntasRoyner AguiarAún no hay calificaciones
- Descripción y Funcionamiento Transmision AutomaticaDocumento4 páginasDescripción y Funcionamiento Transmision Automatica22185565Aún no hay calificaciones
- Convertidor de Torque - Entendiendo la Velocidad de AcopleDocumento3 páginasConvertidor de Torque - Entendiendo la Velocidad de Acoplek_jagutieAún no hay calificaciones
- Entiéndelos Por Fin - Par Motor y Potencia en Motores Diésel y GasolinaDocumento9 páginasEntiéndelos Por Fin - Par Motor y Potencia en Motores Diésel y GasolinaFranTSBAún no hay calificaciones
- Examen Mecanica FundamentalDocumento5 páginasExamen Mecanica FundamentalEdison alaAún no hay calificaciones
- Estudio Sobre Torque y Caballos de FuerzaDocumento4 páginasEstudio Sobre Torque y Caballos de FuerzaSergioSalvadorAún no hay calificaciones
- P Control de Motor CDDocumento10 páginasP Control de Motor CDZoconer ZAún no hay calificaciones
- Taller 5 de Màquinas ElectricasDocumento3 páginasTaller 5 de Màquinas ElectricasAbdiel AguilarAún no hay calificaciones
- Practica 2Documento11 páginasPractica 2LïzbëthSantösAún no hay calificaciones
- Teoria Motores Paso A PasoDocumento29 páginasTeoria Motores Paso A PasomarlotopAún no hay calificaciones
- La Caja de CambiosDocumento8 páginasLa Caja de CambiosMartin Callejo Sainz de la MazaAún no hay calificaciones
- Modelos y Especificaciones de Servo Motores Ye LiDocumento3 páginasModelos y Especificaciones de Servo Motores Ye LiCristian Moya BejaranoAún no hay calificaciones
- Curvas Caracteristicas de Motores y Vehiculos Recomprimidos.Documento49 páginasCurvas Caracteristicas de Motores y Vehiculos Recomprimidos.Guido PinedoAún no hay calificaciones
- Control de movimiento con motores paso a pasoDocumento6 páginasControl de movimiento con motores paso a pasoTeam seriesAún no hay calificaciones
- Motores Paso A PasoDocumento5 páginasMotores Paso A Pasoivansc4Aún no hay calificaciones
- 200 CCDocumento2 páginas200 CCDaniel RiosAún no hay calificaciones
- 1.1 Motores de Ca - 033230Documento4 páginas1.1 Motores de Ca - 033230teresmtz16Aún no hay calificaciones
- Motores Paso A PasoDocumento26 páginasMotores Paso A PasoLuis Andres Pradenas FuentesAún no hay calificaciones
- Componentes de Los Motores BrushedDocumento4 páginasComponentes de Los Motores BrushedWinson Marza VeraAún no hay calificaciones
- Motores Sin EscobillasDocumento2 páginasMotores Sin EscobillasMéndez Chávez DavidAún no hay calificaciones
- GL - TMS3401 - L08M.doc 2012 R.Documento17 páginasGL - TMS3401 - L08M.doc 2012 R.Juanfrancisco Rojas OlivaresAún no hay calificaciones
- Avance Proyecto de Gato Electrico 2do GrupoDocumento9 páginasAvance Proyecto de Gato Electrico 2do GrupoJêffersôn Vladîmîr0% (1)
- Evolucion y DesarrolloDocumento33 páginasEvolucion y DesarrolloDanny Cruz MendozaAún no hay calificaciones
- VarVelocMotACDocumento24 páginasVarVelocMotACwaviteAún no hay calificaciones
- Resumen Curso Perez JesusDocumento22 páginasResumen Curso Perez JesusJESUS MANUEL PEREZ PEREZAún no hay calificaciones
- MotoreductorDocumento5 páginasMotoreductorGonzalo TapiaAún no hay calificaciones
- Mecanica de Los Medios Continuos. Perla PiriDocumento7 páginasMecanica de Los Medios Continuos. Perla Piriperla piriAún no hay calificaciones
- Tema 5Documento39 páginasTema 5Dilian VarelaAún no hay calificaciones
- Tutorial de Motores Paso A PasoDocumento8 páginasTutorial de Motores Paso A PasoAnonymous dbT2wROrxrAún no hay calificaciones
- Tarea Visualizacion de Procesos ServoDocumento9 páginasTarea Visualizacion de Procesos ServoBRANDON HIRAN PEREZ MONTEJANOAún no hay calificaciones
- Par y Potencia MotoresDocumento27 páginasPar y Potencia Motoresjlcorsan9117100% (1)
- Transmisiones automáticas: funcionamiento y tiposDocumento15 páginasTransmisiones automáticas: funcionamiento y tiposchristianAún no hay calificaciones
- Dimensionamiento de Un Servo Motor - Motion ControlDocumento8 páginasDimensionamiento de Un Servo Motor - Motion ControlNora StephensAún no hay calificaciones
- Grupo Multiplicador y Divisor de Las Cajas de Cambios MecánicasDocumento6 páginasGrupo Multiplicador y Divisor de Las Cajas de Cambios MecánicasDanny Juela100% (1)
- Anexo 4. MotorDocumento15 páginasAnexo 4. MotorValen CubidesAún no hay calificaciones
- Motor Paso A Paso NEMADocumento35 páginasMotor Paso A Paso NEMAdeaquidemarg-1Aún no hay calificaciones
- Resumen 2do Parcial Ing Automotriz 2Documento60 páginasResumen 2do Parcial Ing Automotriz 2Florencia FascettoAún no hay calificaciones
- Motor Paso A Paso LinkDocumento5 páginasMotor Paso A Paso LinkDidier bustos arenasAún no hay calificaciones
- Motores - Leccion - 1 AbilixDocumento18 páginasMotores - Leccion - 1 AbilixNancy JamaicaAún no hay calificaciones
- Motores Eléctricos Vs Motores de Combustión InternaDocumento7 páginasMotores Eléctricos Vs Motores de Combustión InternaJair CedeñoAún no hay calificaciones
- Cálculo de La Potencia de Un Motor y Un ReductorDocumento4 páginasCálculo de La Potencia de Un Motor y Un ReductorEduardo Mario Nuñez100% (1)
- Apuntes Avance 1 MaquiDocumento5 páginasApuntes Avance 1 MaquiVicaña Mendoza Jesús JhonAún no hay calificaciones
- Como elegir el motor electrico adecuado para tu avionDocumento19 páginasComo elegir el motor electrico adecuado para tu avionJessica Quijandría TenorioAún no hay calificaciones
- Preguntas Técnicas Sobre Motores Eléctricos TraccionariosDocumento5 páginasPreguntas Técnicas Sobre Motores Eléctricos TraccionariosChester Noel Brenes AguirreAún no hay calificaciones
- Cómo funciona un servomotorDocumento8 páginasCómo funciona un servomotorGABRIELPEREZBRINDIS0% (1)
- Transmisiones Mecánicas ClasesDocumento43 páginasTransmisiones Mecánicas ClasesFrancisco Hernán Valdés Alfaro100% (1)
- Tema3 - Vehiculo Electrico y Energia RenovableDocumento69 páginasTema3 - Vehiculo Electrico y Energia RenovableairtonAún no hay calificaciones
- Potencia y Par Motor. Cadena Cinemática. Estabilidad en los VehículosDocumento27 páginasPotencia y Par Motor. Cadena Cinemática. Estabilidad en los VehículosJUAN BAUTISTAAún no hay calificaciones
- Mapa Conceptual Evaluación FormDocumento1 páginaMapa Conceptual Evaluación FormSolucomp RDAún no hay calificaciones
- Trabajo 1-1Documento9 páginasTrabajo 1-1Solucomp RDAún no hay calificaciones
- Diferencias y Semejanzas Entre Administración y Gestión EducativaDocumento2 páginasDiferencias y Semejanzas Entre Administración y Gestión EducativaSolucomp RD100% (1)
- Bases Teóricas Del Aprendizaje DialógicoDocumento3 páginasBases Teóricas Del Aprendizaje DialógicoSolucomp RDAún no hay calificaciones
- Documento Sin TítuloDocumento5 páginasDocumento Sin TítuloSolucomp RDAún no hay calificaciones
- Prueba diagnóstica de colores y formas geométricasDocumento2 páginasPrueba diagnóstica de colores y formas geométricasSolucomp RD100% (1)
- Copia de Evaluación 2. Módulo 6 Robótica EducativaDocumento1 páginaCopia de Evaluación 2. Módulo 6 Robótica EducativaSolucomp RDAún no hay calificaciones
- Actividad para Desarrollarse Por Centro EducativoDocumento4 páginasActividad para Desarrollarse Por Centro EducativoSolucomp RDAún no hay calificaciones
- Trabajo 1Documento6 páginasTrabajo 1Solucomp RDAún no hay calificaciones
- Yo Saludaré Este Día Con Amor en Mi CorazónDocumento1 páginaYo Saludaré Este Día Con Amor en Mi CorazónSolucomp RDAún no hay calificaciones
- Evaluacion Diagnostica ArteDocumento2 páginasEvaluacion Diagnostica ArteSolucomp RD100% (4)
- Documento Sin TítuloDocumento5 páginasDocumento Sin TítuloSolucomp RDAún no hay calificaciones
- Catedras Ciudadanas PreprimarioDocumento14 páginasCatedras Ciudadanas PreprimarioSolucomp RDAún no hay calificaciones
- Diplomado programación iconográfica robótica educativa Módulo 5 Actividad 2Documento2 páginasDiplomado programación iconográfica robótica educativa Módulo 5 Actividad 2Solucomp RDAún no hay calificaciones
- Actividad 1. Modulo6Documento1 páginaActividad 1. Modulo6Solucomp RDAún no hay calificaciones
- El secreto más grande del éxito: el amorDocumento3 páginasEl secreto más grande del éxito: el amorSolucomp RDAún no hay calificaciones
- Copia de Evaluación 2. Módulo 6 Robótica EducativaDocumento1 páginaCopia de Evaluación 2. Módulo 6 Robótica EducativaSolucomp RDAún no hay calificaciones
- Rubrica Las LetrasDocumento17 páginasRubrica Las LetrasSolucomp RDAún no hay calificaciones
- Desarrollo motor y lenguajeDocumento6 páginasDesarrollo motor y lenguajeSolucomp RDAún no hay calificaciones
- Rubrica de La Familia EveDocumento5 páginasRubrica de La Familia EveSolucomp RDAún no hay calificaciones
- Prueba de Dignóstica ArteDocumento2 páginasPrueba de Dignóstica ArteSolucomp RDAún no hay calificaciones
- Clases baile gaitaDocumento5 páginasClases baile gaitaSolucomp RDAún no hay calificaciones
- Planificación educativa post-covid para el nuevo ciclo escolarDocumento3 páginasPlanificación educativa post-covid para el nuevo ciclo escolarSolucomp RDAún no hay calificaciones
- Programa de Reforestación 2022 con 31 participantes y 1.141 árbolesDocumento2 páginasPrograma de Reforestación 2022 con 31 participantes y 1.141 árbolesSolucomp RDAún no hay calificaciones
- Primera InfanciaDocumento2 páginasPrimera InfanciaSolucomp RDAún no hay calificaciones
- Artículo 63Documento5 páginasArtículo 63Solucomp RDAún no hay calificaciones
- Desigualdad educativa en RDDocumento18 páginasDesigualdad educativa en RDSolucomp RDAún no hay calificaciones
- Informe de Lectura Sobre Atención y Educación de La Primera Infancia1Documento2 páginasInforme de Lectura Sobre Atención y Educación de La Primera Infancia1Solucomp RDAún no hay calificaciones
- Instrumento Nivel Inicial para Evaluación DiagnósticaDocumento24 páginasInstrumento Nivel Inicial para Evaluación DiagnósticaSolucomp RDAún no hay calificaciones
- Manual Uniones Juntas para Soldadura Partes Aplicaciones Procesos Soldadura TecsupDocumento18 páginasManual Uniones Juntas para Soldadura Partes Aplicaciones Procesos Soldadura TecsupJaime Sua100% (1)
- FormularioProbabilidadDistribuciónDocumento1 páginaFormularioProbabilidadDistribuciónNoemi Márquez FernándezAún no hay calificaciones
- Historia y propiedades de los alambres ortodóncicosDocumento13 páginasHistoria y propiedades de los alambres ortodóncicosjames barreto100% (1)
- Taller Repaso IiDocumento15 páginasTaller Repaso IiA̳̿l̳̿e̳̿x̳̿a̳̿n̳̿d̳̿e̳̿r̳̿ L̳̿u̳̿n̳̿a̳̿0% (1)
- Unidad 4 Transferencia de CalorDocumento9 páginasUnidad 4 Transferencia de CalorSelinaAún no hay calificaciones
- Estadistica 8 - Guia 04 - Análisis de Las MTCDocumento4 páginasEstadistica 8 - Guia 04 - Análisis de Las MTCnancy pulgarinAún no hay calificaciones
- 7 Apuntes de Altimetría - Nivelacion Por Cuadrícula PDFDocumento37 páginas7 Apuntes de Altimetría - Nivelacion Por Cuadrícula PDFpaulsurveyAún no hay calificaciones
- Flujo en Tuberias InvestigacionDocumento5 páginasFlujo en Tuberias InvestigacionKevin SaaVedra CastañedaAún no hay calificaciones
- Curso básico de topografía: principios, métodos y aplicacionesDocumento22 páginasCurso básico de topografía: principios, métodos y aplicacionesJose Luis Gastélum JiménezAún no hay calificaciones
- s05 Cinematica Curvilinea - PfaDocumento23 páginass05 Cinematica Curvilinea - PfaLynn Fernandez FuentesAún no hay calificaciones
- Funciones MatemáticasDocumento17 páginasFunciones MatemáticasValentina Franco DiazAún no hay calificaciones
- Paso2 - Logica MatematicaDocumento10 páginasPaso2 - Logica MatematicaGenaAún no hay calificaciones
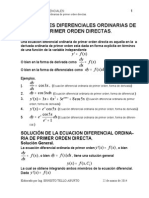
- Ecuaciones Diferenciales de Primer Orden Solucion DirectaDocumento10 páginasEcuaciones Diferenciales de Primer Orden Solucion DirectaJimmy GarciaAún no hay calificaciones
- Guía 8 - Multiplicación Algebraica I.inddDocumento5 páginasGuía 8 - Multiplicación Algebraica I.inddIsy Omar Florez YucraAún no hay calificaciones
- Cordobatorres Ivette M11S2AI4Documento4 páginasCordobatorres Ivette M11S2AI4Themis Gabriela Herrera LópezAún no hay calificaciones
- Exposición - Permutaciones Circulares y CombinacionesDocumento2 páginasExposición - Permutaciones Circulares y CombinacionesPeter ParkerAún no hay calificaciones
- ExperienciasDocumento8 páginasExperienciaswilfredo alegreAún no hay calificaciones
- VECTORES R2 Y R3IIIklsDocumento43 páginasVECTORES R2 Y R3IIIklsJEAN FRANCO JOSE LIMA CHALESAún no hay calificaciones
- Estabilizacion de Suelos Con CalDocumento5 páginasEstabilizacion de Suelos Con CalalanmanuAún no hay calificaciones
- Estadistica ProbabilidadDocumento22 páginasEstadistica ProbabilidadRoxana NoemíAún no hay calificaciones
- Matematica Basica 6per 1uDocumento23 páginasMatematica Basica 6per 1uJose Luis Monzon ShauAún no hay calificaciones
- Cuadernillo Ingreso TUPDocumento21 páginasCuadernillo Ingreso TUPDaiana A. SosaAún no hay calificaciones
- 01.1 - Experimento Aleatorio, Espacio Muestral, SucesoDocumento13 páginas01.1 - Experimento Aleatorio, Espacio Muestral, SucesoKevin RubenAún no hay calificaciones
- 2.1 Interés Compuesto Definición, Terminología y FórmulasDocumento6 páginas2.1 Interés Compuesto Definición, Terminología y FórmulasÁngel AyalaAún no hay calificaciones
- TallerDocumento17 páginasTallerCharly GarciaAún no hay calificaciones
- PROGRAMACION ANUAL 2022 MATEMÁTICA - 5° - OkDocumento45 páginasPROGRAMACION ANUAL 2022 MATEMÁTICA - 5° - OkJEAN MARCO CASTRO LOZANOAún no hay calificaciones
- Notas - Biomecánica 2 - Principios de La BiomecánicaDocumento69 páginasNotas - Biomecánica 2 - Principios de La BiomecánicaPilarAún no hay calificaciones
- Capitulo 1 y 2, Mecanica RocasDocumento24 páginasCapitulo 1 y 2, Mecanica RocasPablo SandovalAún no hay calificaciones
- Guias Dinamica (1,2,3 y 4)Documento33 páginasGuias Dinamica (1,2,3 y 4)Paola Geraldine Hinostroza RamirezAún no hay calificaciones
- Comentario Las Reglas Del MetodoDocumento2 páginasComentario Las Reglas Del MetodoDavidAún no hay calificaciones
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- LAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.De EverandLAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.Calificación: 4.5 de 5 estrellas4.5/5 (54)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónDe EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteCalificación: 1 de 5 estrellas1/5 (1)
- Todo Sobre Tecnología Blockchain: La Guía Definitiva Para Principiantes Sobre Monederos BlockchainDe EverandTodo Sobre Tecnología Blockchain: La Guía Definitiva Para Principiantes Sobre Monederos BlockchainAún no hay calificaciones
- Machine Learning y Deep Learning: Usando Python, Scikit y KerasDe EverandMachine Learning y Deep Learning: Usando Python, Scikit y KerasAún no hay calificaciones
- El método de los elementos finitos: Un enfoque teórico prácticoDe EverandEl método de los elementos finitos: Un enfoque teórico prácticoCalificación: 3 de 5 estrellas3/5 (4)
- Excel 2021 y 365 Paso a Paso: Paso a PasoDe EverandExcel 2021 y 365 Paso a Paso: Paso a PasoCalificación: 5 de 5 estrellas5/5 (12)
- El dilema humano: Del Homo sapiens al Homo techDe EverandEl dilema humano: Del Homo sapiens al Homo techCalificación: 4 de 5 estrellas4/5 (1)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- ¿Cómo piensan las máquinas?: Inteligencia artificial para humanosDe Everand¿Cómo piensan las máquinas?: Inteligencia artificial para humanosCalificación: 5 de 5 estrellas5/5 (1)
- Design Thinking para principiantes: La innovación como factor para el éxito empresarialDe EverandDesign Thinking para principiantes: La innovación como factor para el éxito empresarialCalificación: 4.5 de 5 estrellas4.5/5 (10)
- La revolución de Netflix en el cine y la televisión: Pantallas, series y streamingDe EverandLa revolución de Netflix en el cine y la televisión: Pantallas, series y streamingCalificación: 5 de 5 estrellas5/5 (2)
- EL PLAN DE NEGOCIOS DE UNA FORMA SENCILLA. La guía práctica que ayuda a poner en marcha nuevos proyectos e ideas empresariales.De EverandEL PLAN DE NEGOCIOS DE UNA FORMA SENCILLA. La guía práctica que ayuda a poner en marcha nuevos proyectos e ideas empresariales.Calificación: 4 de 5 estrellas4/5 (20)
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasDe EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasCalificación: 4.5 de 5 estrellas4.5/5 (14)
- ChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...De EverandChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...Calificación: 5 de 5 estrellas5/5 (4)
- Estructuras de Datos Básicas: Programación orientada a objetos con JavaDe EverandEstructuras de Datos Básicas: Programación orientada a objetos con JavaCalificación: 5 de 5 estrellas5/5 (1)
- Gestión de Proyectos con Microsoft Project 2013: Software de gestión de proyectosDe EverandGestión de Proyectos con Microsoft Project 2013: Software de gestión de proyectosCalificación: 5 de 5 estrellas5/5 (3)
- Lo Secreto Del Mantenimiento IndustrialDe EverandLo Secreto Del Mantenimiento IndustrialCalificación: 4 de 5 estrellas4/5 (2)