También podría gustarte
- Diseño Por Root LocusDocumento10 páginasDiseño Por Root LocusJuan David CarrilloAún no hay calificaciones
- Ingeniería de Control: Tema 1b. Análisis de La Respuesta en FrecuenciaDocumento117 páginasIngeniería de Control: Tema 1b. Análisis de La Respuesta en Frecuenciasantiago pablo alberto100% (1)
- Control Analogo - Tarea 3-2Documento17 páginasControl Analogo - Tarea 3-2willian mendozaAún no hay calificaciones
- Compensadores RF-1Documento8 páginasCompensadores RF-1Pedro MontalvoAún no hay calificaciones
- Estabilidad CriticaDocumento6 páginasEstabilidad CriticaLuz666Aún no hay calificaciones
- Lab Control8Documento11 páginasLab Control8joel jacintoAún no hay calificaciones
- Control Analogo - Tarea 2Documento11 páginasControl Analogo - Tarea 2willian mendozaAún no hay calificaciones
- Ejercicios Tarea 2Documento9 páginasEjercicios Tarea 2Alexis Yuri Chaves BurbanoAún no hay calificaciones
- Fase 2 - Andres Peña - 66Documento26 páginasFase 2 - Andres Peña - 66Elida Rosana Romero Peralta100% (2)
- EE1920Parte2 SolucionDocumento5 páginasEE1920Parte2 SolucionCesar Daniel Padilla GonzalezAún no hay calificaciones
- Tarea 2 Control AnalogicoDocumento8 páginasTarea 2 Control AnalogicoJorge Luis Jerezano EscobarAún no hay calificaciones
- Aporte 2Documento8 páginasAporte 2Magaly QuimbayoAún no hay calificaciones
- Teoria de ControlDocumento55 páginasTeoria de ControlJonathan GranadosAún no hay calificaciones
- Mathcad - AYUDANTIA LGR PDFDocumento4 páginasMathcad - AYUDANTIA LGR PDFAnonymous iQ2fF1miCbAún no hay calificaciones
- Tarea Final Control Analogo Aster VargasDocumento8 páginasTarea Final Control Analogo Aster Vargasaster vargas100% (1)
- Lugar Geométrico de Las RaicesDocumento15 páginasLugar Geométrico de Las Raices19375622Aún no hay calificaciones
- Tarea 2 Control Analogo.Documento9 páginasTarea 2 Control Analogo.Naimer Urango Banqueth100% (1)
- Control Analogo Tarea 2 - AnálisisDocumento14 páginasControl Analogo Tarea 2 - AnálisiskristianAún no hay calificaciones
- Aporte Individual Tarea 2Documento11 páginasAporte Individual Tarea 2MaryuryAún no hay calificaciones
- Universidad Nacional Autónoma de México: Roberto Andrés Figueroa Ceballos Profesor: Dr. Leonid Fridman GoldreichDocumento11 páginasUniversidad Nacional Autónoma de México: Roberto Andrés Figueroa Ceballos Profesor: Dr. Leonid Fridman Goldreichroberto figueroaAún no hay calificaciones
- Tarea3 ControlAnalogo Grupo203040 75Documento17 páginasTarea3 ControlAnalogo Grupo203040 75daniel canoAún no hay calificaciones
- Prom U2Documento8 páginasProm U2Tomas HuxAún no hay calificaciones
- RA2Documento18 páginasRA2Angel Manuel Ortegon MayAún no hay calificaciones
- PC1 2021.2 SolDocumento10 páginasPC1 2021.2 SolEros Alvin Airthon Damas QuispeAún no hay calificaciones
- 2024 FINAL 21 Feb T1 ResolucionDocumento3 páginas2024 FINAL 21 Feb T1 ResoluciononixbalderasAún no hay calificaciones
- Ej Prop 3 SC1 2018Documento4 páginasEj Prop 3 SC1 2018Nico DomínguezAún no hay calificaciones
- PC2 2021.2 SolDocumento8 páginasPC2 2021.2 SolEros Alvin Airthon Damas QuispeAún no hay calificaciones
- 2020 - Criterio Routh-Hurwitz PDFDocumento14 páginas2020 - Criterio Routh-Hurwitz PDFJuanAldairRiveraDueñasAún no hay calificaciones
- Estabilidad Por El Criterio de NyquistDocumento7 páginasEstabilidad Por El Criterio de NyquistAlanAún no hay calificaciones
- Tarea 2 Carlos ClavijoDocumento13 páginasTarea 2 Carlos ClavijoGarofAún no hay calificaciones
- Control Análogo Fase 3 UNADDocumento7 páginasControl Análogo Fase 3 UNADisaac contrerasAún no hay calificaciones
- Nayquis Una Puno 2020Documento7 páginasNayquis Una Puno 2020Jhoel Quispe TiconaAún no hay calificaciones
- Análisis de Función de Transferencia de Tercer OrdenDocumento7 páginasAnálisis de Función de Transferencia de Tercer OrdenEduardo PastorAún no hay calificaciones
- Ejercicios Resueltos Diseño de Controladores (EASY ENGINEERING) PDFDocumento24 páginasEjercicios Resueltos Diseño de Controladores (EASY ENGINEERING) PDFScott MelgarejoAún no hay calificaciones
- 2024 FINAL 21 Feb T3 ResolucionDocumento3 páginas2024 FINAL 21 Feb T3 ResoluciononixbalderasAún no hay calificaciones
- Ejercicios y ProblemasDocumento172 páginasEjercicios y ProblemasJavier Muñoz RomanAún no hay calificaciones
- Sesión 4Documento4 páginasSesión 4Octavio CharryAún no hay calificaciones
- PDF Problema 72 Saldarriaga ResueltoDocumento7 páginasPDF Problema 72 Saldarriaga Resueltofaya_16Aún no hay calificaciones
- Documento Sin TítuloDocumento9 páginasDocumento Sin TítuloAndres Manosalva100% (1)
- Tarea 2 Control Analogo Andres NaranjoDocumento7 páginasTarea 2 Control Analogo Andres NaranjoAndres Naranjo Sarmiento100% (1)
- Tarea 1 Aldair Polo 24Documento11 páginasTarea 1 Aldair Polo 24David PoloAún no hay calificaciones
- Paso 6 Grupo Grupo 5Documento8 páginasPaso 6 Grupo Grupo 5HAYRA LUYISA CUESTA LOPEZAún no hay calificaciones
- Ejercicio de LGRDocumento28 páginasEjercicio de LGRmario gomezAún no hay calificaciones
- Capitulo3 Analisis LGR PDFDocumento12 páginasCapitulo3 Analisis LGR PDFMarcelo Parada ValenzuelaAún no hay calificaciones
- COMPENSADORDocumento18 páginasCOMPENSADORBryan GiovanniAún no hay calificaciones
- Reporte - Practica1 Obtención de La Función de Transferencia de Un Sistema FísicoDocumento7 páginasReporte - Practica1 Obtención de La Función de Transferencia de Un Sistema FísicoLuis Angel Martinez RamirezAún no hay calificaciones
- Instruneticon 2Documento7 páginasInstruneticon 2José Manuel IslasAún no hay calificaciones
- Lugar Geométrico de Las RaícesDocumento9 páginasLugar Geométrico de Las Raícesjorge.campuzanohotmail.esAún no hay calificaciones
- Bode PID PDFDocumento26 páginasBode PID PDFIsaac MendibleAún no hay calificaciones
- Ejemplo Resuelto Comp Ens Adores LGRDocumento3 páginasEjemplo Resuelto Comp Ens Adores LGRFreddy Israel Peñaloza Rangel0% (1)
- Avance Eder CastañedaDocumento8 páginasAvance Eder Castañedajhonatan gironAún no hay calificaciones
- 2operadores MatemáticosDocumento9 páginas2operadores MatemáticosDave Nick Lequernaque PelaezAún no hay calificaciones
- Solucionario Hito 2 Modelo BDocumento5 páginasSolucionario Hito 2 Modelo BFabrizioVxAún no hay calificaciones
- Taller 2 ALgebra AbstractaDocumento4 páginasTaller 2 ALgebra AbstractaVioleta RuizAún no hay calificaciones
- 2013 Febrero-GradoDocumento2 páginas2013 Febrero-GradoToni Garcia PedreroAún no hay calificaciones
- Tarea 2 Control AnalogoDocumento23 páginasTarea 2 Control Analogooswaldo perciaAún no hay calificaciones
- Guia Del Usuario 3.5Documento26 páginasGuia Del Usuario 3.5Fernando Reynoso MagalloniAún no hay calificaciones
- Evaluación Formativa 3 - Revisión Del IntentoDocumento4 páginasEvaluación Formativa 3 - Revisión Del Intentodiego.gutierrezdre24Aún no hay calificaciones
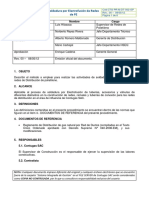
- CTG-PR-M-DT-002-GP Sold Por Electrofusión de PEDocumento6 páginasCTG-PR-M-DT-002-GP Sold Por Electrofusión de PEAlan FloresAún no hay calificaciones
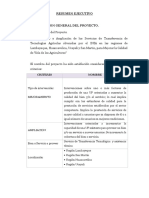
- Pip Inia - Transferencia Tecnologica PDFDocumento47 páginasPip Inia - Transferencia Tecnologica PDFJuan PerezAún no hay calificaciones
- Constancia de Pago: Ingreso Descripción MONTO (S/.) Egreso Descripción MONTO (S/.) Saldo/AdeudosDocumento1 páginaConstancia de Pago: Ingreso Descripción MONTO (S/.) Egreso Descripción MONTO (S/.) Saldo/AdeudosCamacho Camacho RochaAún no hay calificaciones
- UntitledDocumento5 páginasUntitledcrisvillaraAún no hay calificaciones
- DP S06.s1 - Disposicion de PlantaDocumento37 páginasDP S06.s1 - Disposicion de PlantaAndre LaevAún no hay calificaciones
- Trabajo 2 CorteDocumento7 páginasTrabajo 2 CorteDEIBY ALEXANDER AGUILAR VEGAAún no hay calificaciones
- Lean Project ManagementDocumento6 páginasLean Project ManagementMaria del Pilar VivasAún no hay calificaciones
- Razonamiento Por Clausulas PDFDocumento8 páginasRazonamiento Por Clausulas PDFDiego Flores CalcinaAún no hay calificaciones
- Cadena de Valor Nestle TlaxcalaDocumento24 páginasCadena de Valor Nestle TlaxcalaSylviahAún no hay calificaciones
- Informe de Actividades I.E.D. San Juan de RiosecoDocumento5 páginasInforme de Actividades I.E.D. San Juan de RiosecoJose Luis SanchezAún no hay calificaciones
- Metodología de La Investigación en IngenieríaDocumento2 páginasMetodología de La Investigación en IngenieríaAndre CariAún no hay calificaciones
- Informe de ConcretoDocumento14 páginasInforme de ConcretoyeserAún no hay calificaciones
- Metodo MontecarloDocumento22 páginasMetodo MontecarloRicardo Carranza ElorriagaAún no hay calificaciones
- ETR-PAG - Respuesta A Observaciones Inst FaenasDocumento19 páginasETR-PAG - Respuesta A Observaciones Inst FaenasAriel GarciaAún no hay calificaciones
- Requerimiento #02 Servicio Mo Bienes y ServiciosDocumento6 páginasRequerimiento #02 Servicio Mo Bienes y ServiciosCHRISTIAN HENRY MARRUFO PAIVAAún no hay calificaciones
- Guia Practica 3Documento2 páginasGuia Practica 3Iris Edith Ramirez MejiaAún no hay calificaciones
- FlushingterDocumento5 páginasFlushingterRoberto GómezAún no hay calificaciones
- Mi Manual de InstalacionDocumento12 páginasMi Manual de InstalacionJeyson ArdilaAún no hay calificaciones
- Ficha Online de Past Simple Practice para Grade 6 PDFDocumento2 páginasFicha Online de Past Simple Practice para Grade 6 PDFGenesis CabreraAún no hay calificaciones
- Representación Gráfica de Un AlgoritmoDocumento6 páginasRepresentación Gráfica de Un AlgoritmoJorge HernándezAún no hay calificaciones
- Mat+I+T14 +Funciones+Usuales+ (L)Documento18 páginasMat+I+T14 +Funciones+Usuales+ (L)Jose CidAún no hay calificaciones
- Estado de Cuenta en LineaDocumento9 páginasEstado de Cuenta en LineaAlexander BordaAún no hay calificaciones
- Diseño Asistido Por ComputadoraDocumento20 páginasDiseño Asistido Por ComputadoraAlma AcostaAún no hay calificaciones
- ResumenDocumento5 páginasResumenjose cortesAún no hay calificaciones
- Guia 2 Electronica Digital Grado 11. Periodo IIDocumento4 páginasGuia 2 Electronica Digital Grado 11. Periodo IIKevin Peña VargasAún no hay calificaciones
- Tema - Técnica McmasterDocumento3 páginasTema - Técnica McmasterMarilys Rendón100% (2)
- Cie MXDocumento10 páginasCie MXjuan carlosAún no hay calificaciones
- Manual contrAA 300 ES 2011-01Documento68 páginasManual contrAA 300 ES 2011-01ELIANA BURGOSAún no hay calificaciones