También podría gustarte
- Reingeniería De Procesos De Manufactura Industrial: Colaboración Entre Cuerpos Académicos Tlaxcala Y Puebla (Enero 2021)De EverandReingeniería De Procesos De Manufactura Industrial: Colaboración Entre Cuerpos Académicos Tlaxcala Y Puebla (Enero 2021)Calificación: 5 de 5 estrellas5/5 (2)
- PROYECTODocumento28 páginasPROYECTOJhon Quispe AndradeAún no hay calificaciones
- Estudiante 06 Informe Final de Vinculación Carrera EstudianteDocumento38 páginasEstudiante 06 Informe Final de Vinculación Carrera EstudianteViviana BatiojaAún no hay calificaciones
- ElectroF in 02 Semaforos FotovoltaicosDocumento23 páginasElectroF in 02 Semaforos FotovoltaicosDuperly Lopez GamboaAún no hay calificaciones
- Silabo Dise Meca NuevorwservletDocumento7 páginasSilabo Dise Meca NuevorwservletDavyd GuzmànAún no hay calificaciones
- Investigación UTO Facultad TécnicaDocumento7 páginasInvestigación UTO Facultad TécnicaErland ChaconAún no hay calificaciones
- Sílabo Metrología PDFDocumento7 páginasSílabo Metrología PDFFernando RamírezAún no hay calificaciones
- Tulcanaza Paul Silabo ModelamientoDocumento9 páginasTulcanaza Paul Silabo ModelamientoKarina CabezasAún no hay calificaciones
- Silabo de Termodinamica AplicadaDocumento6 páginasSilabo de Termodinamica AplicadaReg SaiAún no hay calificaciones
- TR Monogracia ElectronicosDocumento9 páginasTR Monogracia ElectronicosSergio AguilarAún no hay calificaciones
- Syllabus LegislaciónDocumento7 páginasSyllabus LegislaciónJeanette UreñaAún no hay calificaciones
- Gestión energética en la industria láctea de SalcedoDocumento4 páginasGestión energética en la industria láctea de SalcedoDARIO CHILIQUINGAAún no hay calificaciones
- Ejemplo F-IN-02 Inyectora de PolietilenoDocumento11 páginasEjemplo F-IN-02 Inyectora de PolietilenoMiguel SernaAún no hay calificaciones
- Plan de Negocios 1 Alex Pilapaña 3ro MDocumento24 páginasPlan de Negocios 1 Alex Pilapaña 3ro MPilapaña Anaguano Alex Damián 3ro MAún no hay calificaciones
- Ape 1 y 2Documento79 páginasApe 1 y 2Alejandro BalladaresAún no hay calificaciones
- Estudio de métodos y procesos de producción de calzado en CANAANDocumento49 páginasEstudio de métodos y procesos de producción de calzado en CANAANWilmer ChimborazoAún no hay calificaciones
- Presupuesto Estudio Termografico 17-07-2021Documento11 páginasPresupuesto Estudio Termografico 17-07-2021vico2711Aún no hay calificaciones
- C.V Granda Sarmiento Joe KennethDocumento5 páginasC.V Granda Sarmiento Joe KennethJoeAún no hay calificaciones
- Informe Prácticas Preprofesionales en GRINTECDocumento26 páginasInforme Prácticas Preprofesionales en GRINTECluisAún no hay calificaciones
- Yachay. Proyecto Caratula y EstructuraDocumento10 páginasYachay. Proyecto Caratula y EstructuranelsonAún no hay calificaciones
- Act FASE 2 Juan MercadoDocumento11 páginasAct FASE 2 Juan MercadoJuan MercadoAún no hay calificaciones
- Implementacion de Un Tren Motriz Electrico de Bajo ConsumoDocumento9 páginasImplementacion de Un Tren Motriz Electrico de Bajo ConsumoByron RolandoAún no hay calificaciones
- Anteproyecto Flexnort, Ricardo MontañezDocumento40 páginasAnteproyecto Flexnort, Ricardo MontañezVentiocho Guerrero0% (1)
- Anexo 2. Formato de Creacion de Semilleros 2021 - JriglesiasDocumento4 páginasAnexo 2. Formato de Creacion de Semilleros 2021 - Jriglesiasjuan avilaAún no hay calificaciones
- Silabo de Inventario ForestalesDocumento10 páginasSilabo de Inventario Forestalesgrupofatla76Aún no hay calificaciones
- Proyecto 6to MantenimientoDocumento74 páginasProyecto 6to MantenimientoCriss Torres Montero100% (1)
- SEPTIMA FERIA DE INVESTIGACION-convejrtidoDocumento7 páginasSEPTIMA FERIA DE INVESTIGACION-convejrtidoJuan Daniel Ticona MamaniAún no hay calificaciones
- Plan de Tesis Sobre El Diseño Del BiodigestorDocumento20 páginasPlan de Tesis Sobre El Diseño Del BiodigestorVidAlcca Zm100% (1)
- Maquinas Electricoas Dispositivos ElectronicosDocumento68 páginasMaquinas Electricoas Dispositivos ElectronicosKARLA MEDINA GONZALEZAún no hay calificaciones
- Diseño de máquina bobinadora de motores trifásicosDocumento37 páginasDiseño de máquina bobinadora de motores trifásicosAlejandra ZetaAún no hay calificaciones
- Informe de Practicas Preprofesionales Diego CandoDocumento17 páginasInforme de Practicas Preprofesionales Diego CandoRubenAún no hay calificaciones
- Resolucion Virtuales 032 Aprobacion de Tema Carranza SaavedraDocumento1 páginaResolucion Virtuales 032 Aprobacion de Tema Carranza Saavedrarcarranzas1133Aún no hay calificaciones
- Plan Anual Didactico 2014-2015 PrimeroDocumento2 páginasPlan Anual Didactico 2014-2015 PrimeroMario VillanuevaAún no hay calificaciones
- Introducción A La AutomatizaciónDocumento8 páginasIntroducción A La AutomatizaciónNatalia Andrea Cardenas ValderramaAún no hay calificaciones
- ElectronicaDocumento13 páginasElectronicaReneMartinezGutierrezAún no hay calificaciones
- Instalación sistemas solares fotovoltaicos SENA SucreDocumento3 páginasInstalación sistemas solares fotovoltaicos SENA SucreKevin DiazAún no hay calificaciones
- Curriculum Vitae John William VasquezDocumento15 páginasCurriculum Vitae John William VasquezJohn William Vásquez CapachoAún no hay calificaciones
- ANEXO H Informe de Practicas PreprofesionalesDocumento9 páginasANEXO H Informe de Practicas PreprofesionalesD1N32LAAún no hay calificaciones
- Planificación prácticas laboratorio análisisDocumento4 páginasPlanificación prácticas laboratorio análisisAlex ZhañayAún no hay calificaciones
- Trabajo Colaborativo Pro-Industriales - Entrega Sem 1 A 3Documento11 páginasTrabajo Colaborativo Pro-Industriales - Entrega Sem 1 A 3AnaMaríaPlataMorenoAún no hay calificaciones
- Estrada LopezDocumento148 páginasEstrada LopezAndres JohnsonAún no hay calificaciones
- Sistema de Entrenamiento en Automatización Electroneumática para Aplicación en La Industria y LaDocumento91 páginasSistema de Entrenamiento en Automatización Electroneumática para Aplicación en La Industria y LaCie CieAún no hay calificaciones
- P19 MecanicaDocumento8 páginasP19 MecanicaFausto AvilaAún no hay calificaciones
- Modelo Carta Intencion Colaboracion UnivDocumento4 páginasModelo Carta Intencion Colaboracion UnivRosendo ValoyesAún no hay calificaciones
- Riego InteliguenteDocumento13 páginasRiego Inteliguentedavid quinterosAún no hay calificaciones
- EcoeficienciaDocumento22 páginasEcoeficienciaAngelica DavilaAún no hay calificaciones
- Cultivo Hidropónico PDFDocumento15 páginasCultivo Hidropónico PDFmanuel100% (1)
- Diseño y Dimensionamiento de Un Sistema de Proteccion Catodica Por Corriente ImpresaDocumento175 páginasDiseño y Dimensionamiento de Un Sistema de Proteccion Catodica Por Corriente ImpresaDiego Fernando HenaoAún no hay calificaciones
- Carrasco Edgar Informe Practicas Laborales IiDocumento48 páginasCarrasco Edgar Informe Practicas Laborales IiDiánelis OcampoAún no hay calificaciones
- Silabo DiseñoDocumento7 páginasSilabo Diseñoveronica alexandraAún no hay calificaciones
- Uta Fisei 2020 0122 C PDFDocumento1 páginaUta Fisei 2020 0122 C PDFGabriel Perez CordovillaAún no hay calificaciones
- T036 - 80634146 - T Andina JuliacaDocumento117 páginasT036 - 80634146 - T Andina JuliacaAP KarlitosAún no hay calificaciones
- Mayorga Resumen EjecutivoDocumento6 páginasMayorga Resumen EjecutivoDany MayorgaAún no hay calificaciones
- Seguridad en LaboratoriosDocumento32 páginasSeguridad en LaboratoriosDIEGO HUENCHI CABANILLAAún no hay calificaciones
- Ingeniero de Maquinarias y EquipoDocumento1 páginaIngeniero de Maquinarias y EquipoMatías VenegasAún no hay calificaciones
- EDM-ACT1-2021-ID836353 yDocumento10 páginasEDM-ACT1-2021-ID836353 yAlfredo Huamaní EscobarAún no hay calificaciones
- Portafolio de ElectronicaDocumento58 páginasPortafolio de ElectronicaTITO AVILESAún no hay calificaciones
- Diseño de una ratonera electrónica para capturar roedoresDocumento5 páginasDiseño de una ratonera electrónica para capturar roedoresCANAL DE ING. ELECTRONICA UNJFSCAún no hay calificaciones
- Perfil Urquia Musayon, Soto Nieto - Sugerencias1Documento18 páginasPerfil Urquia Musayon, Soto Nieto - Sugerencias1Ivysaur ShinyAún no hay calificaciones
- Informe Electroneumatica FinalDocumento17 páginasInforme Electroneumatica FinalRoberto EncaladaAún no hay calificaciones
- RASGOS DE PERSONALIDADDocumento4 páginasRASGOS DE PERSONALIDADToapanta NestorAún no hay calificaciones
- Objetivos ProfesionalesDocumento2 páginasObjetivos ProfesionalesToapanta NestorAún no hay calificaciones
- PREGUNTAS DE ENTREVISTA PERSONALDocumento1 páginaPREGUNTAS DE ENTREVISTA PERSONALToapanta NestorAún no hay calificaciones
- A continuaciónDocumento1 páginaA continuaciónToapanta NestorAún no hay calificaciones
- 3.1 Ojo Matriz de Riesgos Laborales MRL2 VACIA PMDocumento2 páginas3.1 Ojo Matriz de Riesgos Laborales MRL2 VACIA PMJefferson Steve Chalacan QuelalAún no hay calificaciones
- Procesos de soldadura homogéneas y heterogéneasDocumento28 páginasProcesos de soldadura homogéneas y heterogéneasTeresita Fuentes100% (2)
- Mercado ActualDocumento1 páginaMercado ActualToapanta NestorAún no hay calificaciones
- Libro 1Documento23 páginasLibro 1Toapanta NestorAún no hay calificaciones
- Texto Bàsico SoldaduraDocumento12 páginasTexto Bàsico SoldaduraToapanta NestorAún no hay calificaciones
- Mercado ActualDocumento5 páginasMercado ActualToapanta NestorAún no hay calificaciones
- Clase 3 Gestion Por ProcesosDocumento19 páginasClase 3 Gestion Por ProcesosToapanta NestorAún no hay calificaciones
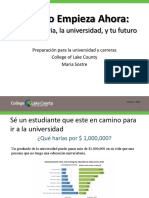
- El Exito Empieza Ahora Warren F19Documento21 páginasEl Exito Empieza Ahora Warren F19Toapanta NestorAún no hay calificaciones
- $R2X1NQTDocumento6 páginas$R2X1NQTToapanta NestorAún no hay calificaciones
- Características Del EmprendedorDocumento7 páginasCaracterísticas Del EmprendedorToapanta NestorAún no hay calificaciones
- Crear valor con ideas originalesDocumento8 páginasCrear valor con ideas originalesToapanta NestorAún no hay calificaciones
- 4 Capitulo 4 CompletoDocumento4 páginas4 Capitulo 4 CompletoToapanta NestorAún no hay calificaciones
- Ser un emprendedorDocumento8 páginasSer un emprendedorToapanta NestorAún no hay calificaciones
- Unidad 1 - Aguafria - P1Documento59 páginasUnidad 1 - Aguafria - P1Toapanta NestorAún no hay calificaciones
- $R5Y7ALGDocumento1 página$R5Y7ALGToapanta NestorAún no hay calificaciones
- $RA9ZOQ0Documento17 páginas$RA9ZOQ0Toapanta NestorAún no hay calificaciones
- $RPAM2D8Documento12 páginas$RPAM2D8Toapanta NestorAún no hay calificaciones
- Ejemplo TDH NPSHDocumento18 páginasEjemplo TDH NPSHToapanta NestorAún no hay calificaciones
- $RRY361WDocumento2 páginas$RRY361WToapanta NestorAún no hay calificaciones
- PropuestaTecnológica EspochDocumento3 páginasPropuestaTecnológica EspochToapanta NestorAún no hay calificaciones
- SELECCIÓN DE BOMBAS HIDRÁULICASDocumento50 páginasSELECCIÓN DE BOMBAS HIDRÁULICASToapanta NestorAún no hay calificaciones
- Trabajo Grupal - 1 ParcialDocumento12 páginasTrabajo Grupal - 1 ParcialToapanta NestorAún no hay calificaciones
- Estudio de MarketigDocumento276 páginasEstudio de MarketigToapanta NestorAún no hay calificaciones
- Pérdidas Primarias y SecundariasDocumento37 páginasPérdidas Primarias y SecundariasToapanta NestorAún no hay calificaciones
- DispositivoTecnológico EspochDocumento3 páginasDispositivoTecnológico EspochToapanta NestorAún no hay calificaciones
- InstalacionesDocumento17 páginasInstalacionesToapanta NestorAún no hay calificaciones
- Unidad 3 Riego SuperficialDocumento15 páginasUnidad 3 Riego SuperficialDiana100% (1)
- Mejoramiento de Las Áreas Verdes de La IE GUE Mariscal Toribio de LuzuriagaDocumento29 páginasMejoramiento de Las Áreas Verdes de La IE GUE Mariscal Toribio de LuzuriagaEduardo Sanchez CarriónAún no hay calificaciones
- Rehabilitación sistema riego Barú ChiriquíDocumento14 páginasRehabilitación sistema riego Barú ChiriquíKaty BeitiaAún no hay calificaciones
- AguaSanJuanDocumento3 páginasAguaSanJuanJorge Chavez ChilonAún no hay calificaciones
- Kallpa - Reduccion PVC Inyectado Enchufes Uf PDFDocumento1 páginaKallpa - Reduccion PVC Inyectado Enchufes Uf PDFGUSTAVO REVOLLOAún no hay calificaciones
- Plan de Manejo Microcuenca Las LajasDocumento38 páginasPlan de Manejo Microcuenca Las LajasRonald ChoqueAún no hay calificaciones
- Manejo Sanitario PresentacionDocumento49 páginasManejo Sanitario Presentacionhans eduardo aguilar KlennerAún no hay calificaciones
- 0029-3 Cultivo de PimientosDocumento35 páginas0029-3 Cultivo de Pimientossheep dorperAún no hay calificaciones
- CatamayoDocumento5 páginasCatamayoReynaldo Vilchez VieraAún no hay calificaciones
- Biohuertos Exposición Vergara - RedEstilosdeVidaSaludable (Autoguardado)Documento13 páginasBiohuertos Exposición Vergara - RedEstilosdeVidaSaludable (Autoguardado)Wilfredo ZarateAún no hay calificaciones
- Fase 3 - Definir en Grupo La Zona de Estudio - 201621ADocumento21 páginasFase 3 - Definir en Grupo La Zona de Estudio - 201621AJhon Jairo Alzate RayoAún no hay calificaciones
- TDR Riego FinalDocumento63 páginasTDR Riego FinalOscar Montalvan VelizAún no hay calificaciones
- Redactamos El Desafío y Empatizamos para Diseñar Proyectos en La Especialidad de Mecánica de ProducciónDocumento10 páginasRedactamos El Desafío y Empatizamos para Diseñar Proyectos en La Especialidad de Mecánica de ProducciónJavier Apaza CruzAún no hay calificaciones
- Costos de ProduccionDocumento15 páginasCostos de ProduccionWilson Calvay0% (1)
- Un Jardín para Mi IEDocumento106 páginasUn Jardín para Mi IECarlosAún no hay calificaciones
- Proyecto de Marco Logico 2022Documento20 páginasProyecto de Marco Logico 2022Cirilo Ricaldi MamaniAún no hay calificaciones
- 12jul Memoria UyoDocumento20 páginas12jul Memoria UyoRaquel Huamán MosqueraAún no hay calificaciones
- Viveros P.PM.VDocumento10 páginasViveros P.PM.VAli DcAún no hay calificaciones
- Plan de Manejo AmbientalDocumento17 páginasPlan de Manejo AmbientalDiego GonzalezAún no hay calificaciones
- Modulo1 Planificacion Vivero Municipal PDFDocumento49 páginasModulo1 Planificacion Vivero Municipal PDFPABLOWYLSONAún no hay calificaciones
- DownloadDocumento15 páginasDownloadwilliam2325Aún no hay calificaciones
- Crucigrama SECTORPRIMARIOprintDocumento2 páginasCrucigrama SECTORPRIMARIOprintburgodeosmasoria0% (1)
- Rossioglosum (Baker) EsDocumento9 páginasRossioglosum (Baker) EsRodolfo RivadeneyraAún no hay calificaciones
- Como Aprovechar Al Maximo Los Nutrientes en Codiciones de Alcalinidad Del Agua y SueloDocumento5 páginasComo Aprovechar Al Maximo Los Nutrientes en Codiciones de Alcalinidad Del Agua y SueloAntonio SahagúnAún no hay calificaciones
- Resumen Ejecutivo - Parque El OlivarDocumento18 páginasResumen Ejecutivo - Parque El OlivarEsau Cabanillas CristobalAún no hay calificaciones
- Geoquimica Del Salar de AtacamaDocumento12 páginasGeoquimica Del Salar de AtacamanetsolariAún no hay calificaciones
- Sector Reque BocatomaDocumento4 páginasSector Reque BocatomaKarla PuicanAún no hay calificaciones
- Memoria DescriptivaDocumento35 páginasMemoria DescriptivaLiliana JackelineAún no hay calificaciones
- Construcción Irrigación MayoccDocumento75 páginasConstrucción Irrigación MayoccCarlos HermosaAún no hay calificaciones
- Descontaminacion Del Rio ChiraDocumento27 páginasDescontaminacion Del Rio ChiraGustavo Correa Neira100% (5)
- Resumen de El cuadro de mando integral paso a paso de Paul R. NivenDe EverandResumen de El cuadro de mando integral paso a paso de Paul R. NivenCalificación: 5 de 5 estrellas5/5 (2)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteCalificación: 1 de 5 estrellas1/5 (1)
- EL PLAN DE NEGOCIOS DE UNA FORMA SENCILLA. La guía práctica que ayuda a poner en marcha nuevos proyectos e ideas empresariales.De EverandEL PLAN DE NEGOCIOS DE UNA FORMA SENCILLA. La guía práctica que ayuda a poner en marcha nuevos proyectos e ideas empresariales.Calificación: 4 de 5 estrellas4/5 (20)
- Excel 2021 y 365 Paso a Paso: Paso a PasoDe EverandExcel 2021 y 365 Paso a Paso: Paso a PasoCalificación: 5 de 5 estrellas5/5 (12)
- LAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.De EverandLAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.Calificación: 4.5 de 5 estrellas4.5/5 (54)
- El dilema humano: Del Homo sapiens al Homo techDe EverandEl dilema humano: Del Homo sapiens al Homo techCalificación: 4 de 5 estrellas4/5 (1)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Investigación de operaciones: Conceptos fundamentalesDe EverandInvestigación de operaciones: Conceptos fundamentalesCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Machine Learning y Deep Learning: Usando Python, Scikit y KerasDe EverandMachine Learning y Deep Learning: Usando Python, Scikit y KerasAún no hay calificaciones
- Metodología básica de instrumentación industrial y electrónicaDe EverandMetodología básica de instrumentación industrial y electrónicaCalificación: 4 de 5 estrellas4/5 (12)
- ¿Cómo piensan las máquinas?: Inteligencia artificial para humanosDe Everand¿Cómo piensan las máquinas?: Inteligencia artificial para humanosCalificación: 5 de 5 estrellas5/5 (1)
- UF0349: ATENCIÓN AL CLIENTE EN EL PROCESO COMERCIAL (ADGG0208) (ADGD0308)De EverandUF0349: ATENCIÓN AL CLIENTE EN EL PROCESO COMERCIAL (ADGG0208) (ADGD0308)Calificación: 2 de 5 estrellas2/5 (1)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónDe EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- ChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...De EverandChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...Calificación: 5 de 5 estrellas5/5 (4)
- La revolución de Netflix en el cine y la televisión: Pantallas, series y streamingDe EverandLa revolución de Netflix en el cine y la televisión: Pantallas, series y streamingCalificación: 5 de 5 estrellas5/5 (2)
- Todo Sobre Tecnología Blockchain: La Guía Definitiva Para Principiantes Sobre Monederos BlockchainDe EverandTodo Sobre Tecnología Blockchain: La Guía Definitiva Para Principiantes Sobre Monederos BlockchainAún no hay calificaciones
- Design Thinking para principiantes: La innovación como factor para el éxito empresarialDe EverandDesign Thinking para principiantes: La innovación como factor para el éxito empresarialCalificación: 4.5 de 5 estrellas4.5/5 (10)
- Minería de Datos: Guía de Minería de Datos para Principiantes, que Incluye Aplicaciones para Negocios, Técnicas de Minería de Datos, Conceptos y MásDe EverandMinería de Datos: Guía de Minería de Datos para Principiantes, que Incluye Aplicaciones para Negocios, Técnicas de Minería de Datos, Conceptos y MásCalificación: 4.5 de 5 estrellas4.5/5 (4)