También podría gustarte
- 100411A 1701 1143851461 Fabian RamosDocumento12 páginas100411A 1701 1143851461 Fabian RamosFabianRamosAún no hay calificaciones
- IntroduccionALaMatematica - Ing. en ComputaciónDocumento5 páginasIntroduccionALaMatematica - Ing. en ComputaciónAgustin PallardóAún no hay calificaciones
- PROGRAMA Introduccion A La MatematicaDocumento5 páginasPROGRAMA Introduccion A La MatematicaFranco Imanol Tejerina MendezAún no hay calificaciones
- Nccu-263 - Trabajo FinalDocumento8 páginasNccu-263 - Trabajo FinalThais MedinaAún no hay calificaciones
- Planeación U1Documento6 páginasPlaneación U1ruben vazquez basaveAún no hay calificaciones
- Valeria Yaressi de Leon Garcia P2Documento4 páginasValeria Yaressi de Leon Garcia P2Finanzas El Torito SinaloenseAún no hay calificaciones
- Carta MA0501Documento9 páginasCarta MA0501Erick VargasAún no hay calificaciones
- 763 TPR 2021-2Documento4 páginas763 TPR 2021-2msalazarpAún no hay calificaciones
- 5° BásicoDocumento2 páginas5° BásicoMaria Angelica Avila VergaraAún no hay calificaciones
- Valeria Yaressi de Leon Garcia Practica 2Documento4 páginasValeria Yaressi de Leon Garcia Practica 2Finanzas El Torito SinaloenseAún no hay calificaciones
- Ut-Matematica 5toDocumento27 páginasUt-Matematica 5tojeanc25Aún no hay calificaciones
- CAL INTegratedDocumento4 páginasCAL INTegratedEdgar Vega LazosAún no hay calificaciones
- Carta MA-501 2023-2Documento8 páginasCarta MA-501 2023-2Miguel TovarAún no hay calificaciones
- Matemáticas IDocumento6 páginasMatemáticas IAngie Daniela Jimenez RomeroAún no hay calificaciones
- Prueba Diagnóstico de Matemática.Documento13 páginasPrueba Diagnóstico de Matemática.Daniel Ulises Acevedo AriasAún no hay calificaciones
- 2020-1 Sil Matemática para ArquitecturaDocumento6 páginas2020-1 Sil Matemática para ArquitecturaJuan Quintana Cárdenas100% (2)
- Indicadores Matemáticas IIDocumento9 páginasIndicadores Matemáticas IIPilar Martín VinuesaAún no hay calificaciones
- Mat-III 0Documento10 páginasMat-III 0Mario NebuloniAún no hay calificaciones
- 1 ÁlgebraDocumento7 páginas1 ÁlgebraManuel Antonio López RamírezAún no hay calificaciones
- Proyecto Parcial 3 Mecanica para La AutomatizacionDocumento4 páginasProyecto Parcial 3 Mecanica para La Automatizacionelio ruizAún no hay calificaciones
- Prog. MAT 103 I-2013Documento6 páginasProg. MAT 103 I-2013Xavier GutierrezAún no hay calificaciones
- Manual de Matrices y DeterminantesDocumento74 páginasManual de Matrices y DeterminantesJorge Porfirio Escobar QuirozAún no hay calificaciones
- Reporte Lab Fisiarq s02 A V (1) Grupo 008Documento11 páginasReporte Lab Fisiarq s02 A V (1) Grupo 008remi pinedoAún no hay calificaciones
- MA331 Algebra Lineal 201601Documento5 páginasMA331 Algebra Lineal 201601Uriel SamoAún no hay calificaciones
- MatematicaDocumento135 páginasMatematicaZurdo ZarateAún no hay calificaciones
- Guia Practica de MatematicaDocumento64 páginasGuia Practica de MatematicaCesar Vallejo Lima NorteAún no hay calificaciones
- 01 Introduccion A La MatematicaDocumento5 páginas01 Introduccion A La MatematicaFlavioPiantanidaAún no hay calificaciones
- Cronograma Dia A Dia Alli 2023-1Documento8 páginasCronograma Dia A Dia Alli 2023-1el xxaraujotentacionxxAún no hay calificaciones
- Pucp Silabos MatematicaDocumento2 páginasPucp Silabos MatematicaJosue Osorio CormanAún no hay calificaciones
- MecanismosDocumento11 páginasMecanismoslalaAún no hay calificaciones
- Prontuario de MatemáticaDocumento3 páginasProntuario de MatemáticaJeanette DelgadoAún no hay calificaciones
- ADA1 PYE Agosto 2019Documento9 páginasADA1 PYE Agosto 2019Aaron Solis MonteroAún no hay calificaciones
- Practica09 PYMN 2020-2Documento11 páginasPractica09 PYMN 2020-2Rogelio SolanoAún no hay calificaciones
- Manual Estudiante 2020-Unidad Ecuaciones y Sistema de EcuacionesDocumento52 páginasManual Estudiante 2020-Unidad Ecuaciones y Sistema de Ecuacionesorlando paez jopiaAún no hay calificaciones
- Matemacica para Administradores IDocumento26 páginasMatemacica para Administradores IEdwin ParedesAún no hay calificaciones
- NM3 Trigonometria 1Documento6 páginasNM3 Trigonometria 1J OS A MPAún no hay calificaciones
- Downloadfile 2Documento5 páginasDownloadfile 2gabriela garciaAún no hay calificaciones
- Pca Matematica Superior 3 BguDocumento5 páginasPca Matematica Superior 3 BguJose Sanchez93% (15)
- Resolución de Ejercicios CACULO ACTIVIDAD 9 ERIKADocumento6 páginasResolución de Ejercicios CACULO ACTIVIDAD 9 ERIKAErika RendonAún no hay calificaciones
- Manual de Matematicas 1 (Lae 106)Documento30 páginasManual de Matematicas 1 (Lae 106)juan mecanicoAún no hay calificaciones
- Manual de Matrices y Determinantes PDFDocumento59 páginasManual de Matrices y Determinantes PDFSpencer Camacho100% (1)
- Guia Programatica MB1Documento4 páginasGuia Programatica MB1DIEGO LUNAAún no hay calificaciones
- Actvidad - 3 - Jec-Herramientas - Pedagogicas LLALLI PDFDocumento24 páginasActvidad - 3 - Jec-Herramientas - Pedagogicas LLALLI PDFBasilio Mamani SuasacaAún no hay calificaciones
- Universidad Nacional AutónomaDocumento16 páginasUniversidad Nacional AutónomaGarcia Guzman DayanaAún no hay calificaciones
- Programa 2 Análisis Mate A 2023Documento9 páginasPrograma 2 Análisis Mate A 2023Seba DBAún no hay calificaciones
- Universidad de San Carlos de Guatemala Facultad de Ingeniería Escuela de Ciencias, Departamento de MatemáticaDocumento4 páginasUniversidad de San Carlos de Guatemala Facultad de Ingeniería Escuela de Ciencias, Departamento de MatemáticacameymerliAún no hay calificaciones
- 366 1113647076 Carlos GonzalezDocumento14 páginas366 1113647076 Carlos GonzalezCarlos GonzálezAún no hay calificaciones
- Guía Didáctica 7° (2) Esadística-Conceptos Matemáticos BásicosDocumento6 páginasGuía Didáctica 7° (2) Esadística-Conceptos Matemáticos BásicosTorres JairoAún no hay calificaciones
- PROTC INDV INVEST OPERC UND 3 (Recuperado Automáticamente)Documento8 páginasPROTC INDV INVEST OPERC UND 3 (Recuperado Automáticamente)jairo castroAún no hay calificaciones
- ORIGINAL Portafolio de Calculo DiferencialDocumento52 páginasORIGINAL Portafolio de Calculo DiferencialjcmarcilloAún no hay calificaciones
- Proyecto 1 Modelo Vectorial Del EspacioDocumento11 páginasProyecto 1 Modelo Vectorial Del EspacioAlbaro Andres TorricoAún no hay calificaciones
- Proyecto Mecanismos Cedillo Sandoval Ricardo HiramDocumento36 páginasProyecto Mecanismos Cedillo Sandoval Ricardo HiramRicardo SandovalAún no hay calificaciones
- 2018-1 Sil Álgebra LinealDocumento5 páginas2018-1 Sil Álgebra LinealEnver Raul Quispe GutierrezAún no hay calificaciones
- Ma 0293Documento10 páginasMa 0293Osman ValleAún no hay calificaciones
- Análisis Numérico y Cálculo Avanzado Industrial Sofia Fosco Primer ParcialDocumento22 páginasAnálisis Numérico y Cálculo Avanzado Industrial Sofia Fosco Primer ParcialCatalina HerreraAún no hay calificaciones
- Introduccion A La Matematica para IngenieriaDocumento10 páginasIntroduccion A La Matematica para IngenieriaJoseph Villalva RiveraAún no hay calificaciones
- Fundamentos matemáticos para administradores y contadoresDe EverandFundamentos matemáticos para administradores y contadoresAún no hay calificaciones
- Replanteo y preparación de tuberías. IMAI0108De EverandReplanteo y preparación de tuberías. IMAI0108Aún no hay calificaciones
- Análisis y diseño de algoritmos: Un enfoque prácticoDe EverandAnálisis y diseño de algoritmos: Un enfoque prácticoAún no hay calificaciones
- Rubrica - Mapa ConceptualDocumento2 páginasRubrica - Mapa ConceptualGasparAún no hay calificaciones
- Proyecto IntegradorDocumento11 páginasProyecto IntegradorGasparAún no hay calificaciones
- Actividad 2 Practica 1Documento4 páginasActividad 2 Practica 1GasparAún no hay calificaciones
- Ejercicios Practicos Unidad 1Documento6 páginasEjercicios Practicos Unidad 1GasparAún no hay calificaciones
- Tarea1 Ergonomia Aplicada Al Factor HumanoDocumento4 páginasTarea1 Ergonomia Aplicada Al Factor HumanoGasparAún no hay calificaciones
- Actividad 3Documento1 páginaActividad 3GasparAún no hay calificaciones
- Actividad 2Documento1 páginaActividad 2GasparAún no hay calificaciones
- ACTIVIDAD 10 Planeando Puntos Del ProyectoDocumento19 páginasACTIVIDAD 10 Planeando Puntos Del ProyectoGasparAún no hay calificaciones
- Actividad 1Documento1 páginaActividad 1GasparAún no hay calificaciones
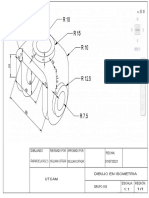
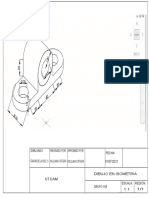
- Cajetin Ejercicio 2Documento1 páginaCajetin Ejercicio 2GasparAún no hay calificaciones
- F-SA-01 Información General Del TutoradoDocumento3 páginasF-SA-01 Información General Del TutoradoGasparAún no hay calificaciones
- Actividad 6Documento13 páginasActividad 6GasparAún no hay calificaciones
- F DC 17 Acta de Aprobacion de La Memoria 3Documento1 páginaF DC 17 Acta de Aprobacion de La Memoria 3GasparAún no hay calificaciones
- Actividad 2Documento6 páginasActividad 2GasparAún no hay calificaciones
- ACTIVIDAD 1 Planeando Puntos Del ProyectoDocumento9 páginasACTIVIDAD 1 Planeando Puntos Del ProyectoGasparAún no hay calificaciones
- Investigacion Introduccion A Los MecanismosDocumento32 páginasInvestigacion Introduccion A Los MecanismosGASPAR DE LA CRUZ SALVADORAún no hay calificaciones
- 1° Evaluación de Unidad 1 Procesos de ConformadoDocumento22 páginas1° Evaluación de Unidad 1 Procesos de ConformadoGasparAún no hay calificaciones
- Investigacion Introduccion A Los MecanismosDocumento32 páginasInvestigacion Introduccion A Los MecanismosGasparAún no hay calificaciones
- ACTIVIDAD 1 Planeando Puntos Del ProyectoDocumento9 páginasACTIVIDAD 1 Planeando Puntos Del ProyectoGasparAún no hay calificaciones
- Reporte Tecnico Unidad 2Documento18 páginasReporte Tecnico Unidad 2GasparAún no hay calificaciones
- Reporte TecnicoDocumento21 páginasReporte TecnicoGasparAún no hay calificaciones
- Mapa MentalDocumento3 páginasMapa MentalGasparAún no hay calificaciones
- Colegio de Bachilleres de TabascoDocumento7 páginasColegio de Bachilleres de TabascoGasparAún no hay calificaciones
- Cuadro SinopticoDocumento3 páginasCuadro SinopticoGasparAún no hay calificaciones
- Cuadro SinopticoDocumento3 páginasCuadro SinopticoGasparAún no hay calificaciones
- Ejercicios PracticosDocumento7 páginasEjercicios PracticosGasparAún no hay calificaciones
- Practica 1Documento9 páginasPractica 1GasparAún no hay calificaciones
- Barra EstabilizadoraDocumento1 páginaBarra EstabilizadoraGasparAún no hay calificaciones
- 2.2 La Ciencia y El Metodo CientificoDocumento8 páginas2.2 La Ciencia y El Metodo CientificoGasparAún no hay calificaciones
- Aritmética Libro CompletoDocumento59 páginasAritmética Libro CompletoBautista Gomez DionisioAún no hay calificaciones
- Tarea4 Romero KarenDocumento16 páginasTarea4 Romero KarenDiana C. RomanAún no hay calificaciones
- Estadistica 2Documento5 páginasEstadistica 2Gianfranco Sumozo100% (1)
- Guia MatematicaDocumento14 páginasGuia MatematicaMïgüêl Ängël FërnändêzAún no hay calificaciones
- Matemáticas Aplicadas A La Economía Y La AdministraciónDocumento93 páginasMatemáticas Aplicadas A La Economía Y La AdministraciónTesoreria LigaAún no hay calificaciones
- TOPOGRAFIA I Clase Dos PDFDocumento32 páginasTOPOGRAFIA I Clase Dos PDFJunior Huaytalla PizarroAún no hay calificaciones
- Ecuaciones de Ahusamiento 2015-IDocumento23 páginasEcuaciones de Ahusamiento 2015-IizumimorizAún no hay calificaciones
- Taller #06 Grado 10° Razones Trigonométricas para Ángulos de 30, 45° y 60°Documento2 páginasTaller #06 Grado 10° Razones Trigonométricas para Ángulos de 30, 45° y 60°Lizzeth SuarezAún no hay calificaciones
- Ecuación de La RectaDocumento20 páginasEcuación de La RectaAlain LeónAún no hay calificaciones
- Matemática Recreativa. Informe 1Documento11 páginasMatemática Recreativa. Informe 1yasmeily martinezAún no hay calificaciones
- Tarjeta Apuntes Fracciones DigitalDocumento7 páginasTarjeta Apuntes Fracciones DigitalEVELYNAún no hay calificaciones
- Semianual Integral ADUNI Trigonometría - Semana 3Documento17 páginasSemianual Integral ADUNI Trigonometría - Semana 3BELTRÁN SONCCOAún no hay calificaciones
- Taller 1 Big DataDocumento2 páginasTaller 1 Big DataArley ValenzuelaAún no hay calificaciones
- Cuaderno de Matemática Unidades y Decenas 1° PrimariaDocumento207 páginasCuaderno de Matemática Unidades y Decenas 1° Primariadelia cubasAún no hay calificaciones
- Din A MicaDocumento269 páginasDin A MicaAlex QuialfAún no hay calificaciones
- 2.raz Trigonom IDocumento2 páginas2.raz Trigonom IFrancisco Bocanegra CiudadAún no hay calificaciones
- SESIÓN 6. - Integrales Definidas. - Evaluación I.D.Documento3 páginasSESIÓN 6. - Integrales Definidas. - Evaluación I.D.Carlos CachagoAún no hay calificaciones
- Como Calcular Desde Latitud Longitud A UTMDocumento6 páginasComo Calcular Desde Latitud Longitud A UTMAlo RoviAún no hay calificaciones
- Taller 1 Sistemas Numericos UmngDocumento4 páginasTaller 1 Sistemas Numericos UmngDiego Alejandro Peraza BeltranAún no hay calificaciones
- El Proceso de Enseñanza de La MatemáticaDocumento18 páginasEl Proceso de Enseñanza de La MatemáticaKarin Jacqueline PadillaAún no hay calificaciones
- Tutorial Granja PorcinaDocumento575 páginasTutorial Granja PorcinaEscarleth Altamirano AguirreAún no hay calificaciones
- Examen Parcial - Semana 4 DIDACTICA DE LA MATEMATICA PDFDocumento19 páginasExamen Parcial - Semana 4 DIDACTICA DE LA MATEMATICA PDFAna Jimena Rodríguez Posada100% (1)
- Ejercicios Propuedtos de ProgramacionDocumento5 páginasEjercicios Propuedtos de ProgramacionpierAún no hay calificaciones
- Examen Final - Semana 8 - RA - PRIMER BLOQUE-ELEMENTOS DE TEORIA DE LA COMPUTACION - (GRUPO1) PDFDocumento8 páginasExamen Final - Semana 8 - RA - PRIMER BLOQUE-ELEMENTOS DE TEORIA DE LA COMPUTACION - (GRUPO1) PDFnini bpAún no hay calificaciones
- II Guía 1 CÓNICASDocumento4 páginasII Guía 1 CÓNICASKono Aliaga SilvaAún no hay calificaciones
- Area 3Documento197 páginasArea 3Cristina HerzAún no hay calificaciones
- Calculo en Varias VariablesDocumento4 páginasCalculo en Varias VariablesFabiola VillablancaAún no hay calificaciones
- Matemáticas - 4° Plan de Fortalecimiento Académico y Ped.Documento28 páginasMatemáticas - 4° Plan de Fortalecimiento Académico y Ped.Miriam Gamboa CoralAún no hay calificaciones
- Documento 64 LogicaDocumento2 páginasDocumento 64 Logicasebastian agudelo trujilloAún no hay calificaciones
- Actividad 8Documento6 páginasActividad 82A42 Arteaga Pérez juan AntonioAún no hay calificaciones