También podría gustarte
- 1.manual NissanDocumento310 páginas1.manual NissanJose Ignacio Sanchez Arenas88% (8)
- Ficha Tecnica de ReparaciónDocumento6 páginasFicha Tecnica de ReparaciónredhielAún no hay calificaciones
- Can Bus SkodaDocumento25 páginasCan Bus SkodaKaren Donoso JaraAún no hay calificaciones
- 1911 ssp186 eDocumento30 páginas1911 ssp186 eJose Reiriz Garcia100% (1)
- El MultiplexadoDocumento12 páginasEl MultiplexadoClaudio Silva100% (2)
- Cómo Limpiar Cuerpo de AceleraciónDocumento2 páginasCómo Limpiar Cuerpo de AceleraciónJuan Pablo LoayzaAún no hay calificaciones
- Rodríguez - José (Informe Escaner)Documento21 páginasRodríguez - José (Informe Escaner)Pepe RodríguezAún no hay calificaciones
- Tema 8 SESCDocumento45 páginasTema 8 SESCRaulAún no hay calificaciones
- Sistema de IluminaciónDocumento14 páginasSistema de IluminaciónLuisAlberto100% (1)
- Funcion Star StopDocumento10 páginasFuncion Star StopfernandosanchezquezaAún no hay calificaciones
- Las Siete Secciones Bus CanDocumento2 páginasLas Siete Secciones Bus CanRamon AyalaAún no hay calificaciones
- Fallas en Sensor de Velocidad - Sensor Efecto Hall - Auto Avance - PDF AS1Documento9 páginasFallas en Sensor de Velocidad - Sensor Efecto Hall - Auto Avance - PDF AS1jl.arce107279Aún no hay calificaciones
- Air Bag SP PDFDocumento23 páginasAir Bag SP PDFManuel Enrique Alarcon CastilloAún no hay calificaciones
- RegloscopiosDocumento10 páginasRegloscopiosTecnicas Reunidas de Automoción100% (1)
- SSA06-Sistema de Seguridad ActivaDocumento31 páginasSSA06-Sistema de Seguridad Activahaguero6699Aún no hay calificaciones
- Leccion No 1Documento12 páginasLeccion No 1Fernando GranadosAún no hay calificaciones
- Conectiviad y RedesDocumento51 páginasConectiviad y RedesYanh Nicolas Castillo DiazAún no hay calificaciones
- Dirección ElectronicaDocumento18 páginasDirección ElectronicaEddy Darwin PeñafielAún no hay calificaciones
- Redes MultiplexadasDocumento58 páginasRedes MultiplexadasReneReinaldo100% (1)
- Sistema de Control de Emisiones A Vehiculos KIADocumento23 páginasSistema de Control de Emisiones A Vehiculos KIAPaulo Cesar Ramirez VerdugoAún no hay calificaciones
- Sis Carg ArranqueDocumento20 páginasSis Carg ArranqueCristina GomezAún no hay calificaciones
- Manual Sistemas Iluminacion Electricidad Automotriz Tecnologias Faros Luces Led Xenon Senalizacion Asistencia NormativaDocumento84 páginasManual Sistemas Iluminacion Electricidad Automotriz Tecnologias Faros Luces Led Xenon Senalizacion Asistencia NormativaAndrésMartínAún no hay calificaciones
- Informe OsciloscopioDocumento13 páginasInforme OsciloscopioChristian CarranzaAún no hay calificaciones
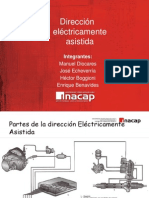
- Direccion ElectricaDocumento6 páginasDireccion ElectricaHéctor BoggioniAún no hay calificaciones
- Perfil Proyecto Activar 18-12-2018Documento27 páginasPerfil Proyecto Activar 18-12-2018Marco SilvaAún no hay calificaciones
- Vehiculos Hibridos PDFDocumento22 páginasVehiculos Hibridos PDFhilia cariasAún no hay calificaciones
- OPACIMETRODocumento11 páginasOPACIMETROjamesmarin007100% (4)
- Cap 12 SeguridadPasivaDocumento37 páginasCap 12 SeguridadPasivacristobal pipaAún no hay calificaciones
- Vehiculos HibridosDocumento23 páginasVehiculos HibridosAlex David PintaAún no hay calificaciones
- Inyección Common RailDocumento3 páginasInyección Common RailBrian HuamanAún no hay calificaciones
- Reforma de Importancia en Un VehículoDocumento8 páginasReforma de Importancia en Un Vehículoirene100% (2)
- 2 - CAN-VAN - Bus - Las ArquitecturasDocumento17 páginas2 - CAN-VAN - Bus - Las ArquitecturasFabi Fabian H C100% (1)
- VW Audi SSP222 Refrigeración ElectrónicaDocumento28 páginasVW Audi SSP222 Refrigeración ElectrónicaWedneslao Lopez100% (2)
- Sistema Del Airbag SrsDocumento5 páginasSistema Del Airbag SrsWilson Acosta LiñanAún no hay calificaciones
- Airbag y Cinturones de Seguridad ARTICULO CESVIMAPDocumento5 páginasAirbag y Cinturones de Seguridad ARTICULO CESVIMAPEnrique García RipollAún no hay calificaciones
- Buses Electrico e Hibridos MonografiaDocumento26 páginasBuses Electrico e Hibridos MonografiaLuis Slender Corimanya (NikeTiM)Aún no hay calificaciones
- El Phaeton - Suspensión NeumáticaDocumento30 páginasEl Phaeton - Suspensión NeumáticaAbd Dec100% (1)
- PROGRAMA Curso Programacion Automotriz CEADocumento6 páginasPROGRAMA Curso Programacion Automotriz CEAjuanmpodioAún no hay calificaciones
- Baterias Hella 02 08Documento4 páginasBaterias Hella 02 08Jose Luis Castillo SanchezAún no hay calificaciones
- Macr33 U1 DR1Documento24 páginasMacr33 U1 DR1maximo saavedra castilloAún no hay calificaciones
- Can BusDocumento33 páginasCan BusmendonarioAún no hay calificaciones
- Pea Administracion y Organización de Talleres A.A NocturnaDocumento12 páginasPea Administracion y Organización de Talleres A.A NocturnaSteven AguirreAún no hay calificaciones
- Word Airbag-Cinturones PirotecnicosDocumento13 páginasWord Airbag-Cinturones PirotecnicosnathaliaAún no hay calificaciones
- Presentacion Electronica Automotriz Sistemas de ComunicacionDocumento17 páginasPresentacion Electronica Automotriz Sistemas de ComunicacionKevin Patricio AsanzaAún no hay calificaciones
- Exposicion Sist. EncendidoDocumento94 páginasExposicion Sist. EncendidoAndrés GarcíaAún no hay calificaciones
- Que Son Las ECUSDocumento4 páginasQue Son Las ECUSOscar SotoAún no hay calificaciones
- RICHARD VEGA Informe Scanner OptativaDocumento15 páginasRICHARD VEGA Informe Scanner OptativaAndy CudcoAún no hay calificaciones
- Sesión de Aprendizaje #4Documento6 páginasSesión de Aprendizaje #4Cesar CauperAún no hay calificaciones
- Can Bus SenatiDocumento81 páginasCan Bus SenatiJunior SalazarAún no hay calificaciones
- MOTORESDocumento32 páginasMOTORESPercy Gonzalo Soliz MirandaAún no hay calificaciones
- Mantenimiento Del Sistema Electrico ElectronicoDocumento6 páginasMantenimiento Del Sistema Electrico ElectronicoRichard ZeaAún no hay calificaciones
- Guia Laboratorio Analisis de DTCDocumento22 páginasGuia Laboratorio Analisis de DTCDiego JopiaAún no hay calificaciones
- Guia 3 ScannerDocumento26 páginasGuia 3 ScannerClaudio VegaAún no hay calificaciones
- Sensor VSS CaracteristicasDocumento1 páginaSensor VSS CaracteristicasRicky SantiagoAún no hay calificaciones
- Protocolo Red CanDocumento31 páginasProtocolo Red CanGuadalupe CamposAún no hay calificaciones
- Informe MultiplexadoDocumento12 páginasInforme MultiplexadoJJ Ochoa AlvarezAún no hay calificaciones
- Sistemas MultiplexadosDocumento13 páginasSistemas MultiplexadosCarlos Gerardo Martinez Luis100% (1)
- Multiplexado en El Automovil Programa de Curso de MultiplexadoDocumento11 páginasMultiplexado en El Automovil Programa de Curso de MultiplexadoHilda AriasAún no hay calificaciones
- CAN BusDocumento3 páginasCAN BusEo GpAún no hay calificaciones
- Lineas CAN BUSDocumento5 páginasLineas CAN BUSFernando Pigazos MotaAún no hay calificaciones
- Sistemas MultiplexadosDocumento14 páginasSistemas MultiplexadosHEYAún no hay calificaciones
- Multiplexado Can BusDocumento38 páginasMultiplexado Can BusJose Ignacio Sanchez ArenasAún no hay calificaciones
- 11.sistema de Seguridad y Conford-199-260Documento62 páginas11.sistema de Seguridad y Conford-199-260Jose Ignacio Sanchez ArenasAún no hay calificaciones
- 12.carrocerias y Sus ElementosDocumento24 páginas12.carrocerias y Sus ElementosJose Ignacio Sanchez ArenasAún no hay calificaciones
- Señales PWM - LINDocumento4 páginasSeñales PWM - LINJose Ignacio Sanchez ArenasAún no hay calificaciones
- Automotriz-08 Frenos PDFDocumento178 páginasAutomotriz-08 Frenos PDFJose Ignacio Sanchez ArenasAún no hay calificaciones
- Embrague. AnimadaDocumento32 páginasEmbrague. AnimadaJose Ignacio Sanchez ArenasAún no hay calificaciones
- Embrague HidraulicoDocumento56 páginasEmbrague HidraulicoJose Ignacio Sanchez ArenasAún no hay calificaciones
- Evaluacion de Desempeño Laboral PDFDocumento1 páginaEvaluacion de Desempeño Laboral PDFJose Ignacio Sanchez ArenasAún no hay calificaciones
- Guia Examen y Reparacion Del EmbragueDocumento2 páginasGuia Examen y Reparacion Del EmbragueJose Ignacio Sanchez ArenasAún no hay calificaciones
- 1 PalancasDocumento59 páginas1 PalancasJose Ignacio Sanchez ArenasAún no hay calificaciones
- U1 Componentes PasivosDocumento12 páginasU1 Componentes PasivosCristian Bazan OrobioAún no hay calificaciones
- Diagnostico de Sistema Electronico Automotriz PDFDocumento238 páginasDiagnostico de Sistema Electronico Automotriz PDFJose Ignacio Sanchez ArenasAún no hay calificaciones
- Problemas Sobre Rectificadores de Onda Completa Con FiltroDocumento2 páginasProblemas Sobre Rectificadores de Onda Completa Con Filtroalfonso garciaAún no hay calificaciones
- Guia de Laboratorio No. 07Documento11 páginasGuia de Laboratorio No. 07TrujilloSergio100% (1)
- Taller Introduccion Al Analisis de CircuitosDocumento8 páginasTaller Introduccion Al Analisis de CircuitosNelson David Gutiérrez MedinaAún no hay calificaciones
- Práctica 03 - Retamozo Vilca, Yuan RaymondDocumento10 páginasPráctica 03 - Retamozo Vilca, Yuan Raymondyuan raymond retamozo vilcaAún no hay calificaciones
- 1.3. Compuertas y Algebra de Boole - Parte1Documento22 páginas1.3. Compuertas y Algebra de Boole - Parte1KAREM ANDREA BARROS CEDILLOAún no hay calificaciones
- Medicion de Nivel Instrumentacion Industrial CAP 3 (1) .Documento25 páginasMedicion de Nivel Instrumentacion Industrial CAP 3 (1) .carmaquiAún no hay calificaciones
- Presentación 1 Endomed 482Documento18 páginasPresentación 1 Endomed 482renato PeñaAún no hay calificaciones
- Actividad 01 C2Documento5 páginasActividad 01 C2CONCEPCION GONGORA MENDEZAún no hay calificaciones
- Forense en Telefonos CelularesDocumento2 páginasForense en Telefonos CelularesabdielAún no hay calificaciones
- Dell Optiplex 755Documento2 páginasDell Optiplex 755LUIS XVAún no hay calificaciones
- Tarea de DibujoDocumento22 páginasTarea de DibujoEsteban Ramirez GuatsozonAún no hay calificaciones
- GuiaCompleta 71021017 2023Documento20 páginasGuiaCompleta 71021017 2023Jorge HernandezAún no hay calificaciones
- Proyecto Cableado Estructurado de Red AlmacenDocumento4 páginasProyecto Cableado Estructurado de Red AlmacenGustavoAún no hay calificaciones
- Manual GalneoDocumento4 páginasManual GalneoMarlon Ferreras MameyesAún no hay calificaciones
- Boleta EntelDocumento5 páginasBoleta EntelBastian OAún no hay calificaciones
- Tema RíosDocumento5 páginasTema RíosTsubasa GarcíaAún no hay calificaciones
- Guia ST Aa3 VfinDocumento10 páginasGuia ST Aa3 VfinSebastian Leon LeonAún no hay calificaciones
- TV Panda EntrenamientoDocumento6 páginasTV Panda EntrenamientoReynaldo VargasAún no hay calificaciones
- Circuitos Microelectrónicos PDFDocumento1007 páginasCircuitos Microelectrónicos PDFreinier100% (7)
- Catalogo InfaproDocumento73 páginasCatalogo InfaproLuis GraterolAún no hay calificaciones
- Manual Control Universal GDCT-840TDocumento7 páginasManual Control Universal GDCT-840TDariuzGonza100% (1)
- Descripción de La RadioDocumento9 páginasDescripción de La Radiorulo_beatlesAún no hay calificaciones
- Trabajo Arduino FinalDocumento19 páginasTrabajo Arduino FinalAnderson MarkAún no hay calificaciones
- Avances Tecnológicos de Hardware y SoftwareDocumento16 páginasAvances Tecnológicos de Hardware y SoftwareKriss GalarzaAún no hay calificaciones
- Analisis Hardware Software y FirmwareDocumento3 páginasAnalisis Hardware Software y FirmwarejuanDLreyes0% (1)
- 80537-Resumen UCCDocumento25 páginas80537-Resumen UCCvictorbarrabaja81Aún no hay calificaciones
- TeleinformaticaDocumento17 páginasTeleinformaticaapi-3797060100% (1)
- Laboratorio 3 Instrumentación Adquisisción de Datos IndirectaDocumento14 páginasLaboratorio 3 Instrumentación Adquisisción de Datos IndirectaKrloz Jj JjAún no hay calificaciones
- Malla Curricular Telecomunicaciones 2019Documento1 páginaMalla Curricular Telecomunicaciones 2019Jherson B Camargo OreAún no hay calificaciones
- Segmentación de CauceDocumento37 páginasSegmentación de CauceAnibal MoralesAún no hay calificaciones