También podría gustarte
- Diseño Práctico De Cimentaciones Sujetas a Vibración Producida Por MaquinariaDe EverandDiseño Práctico De Cimentaciones Sujetas a Vibración Producida Por MaquinariaAún no hay calificaciones
- VibracionesDocumento19 páginasVibracionesGustavoAún no hay calificaciones
- Sistemas Vibratorios Vibracion Libre No AmortiguadaDocumento23 páginasSistemas Vibratorios Vibracion Libre No AmortiguadaZulema Doria DelgadoAún no hay calificaciones
- Vibraciones MecanicasDocumento14 páginasVibraciones MecanicasEdson Euresti JuárezAún no hay calificaciones
- Apuntes de VibracionDocumento17 páginasApuntes de VibracionLUIS JORGE GARCIA GARCIAAún no hay calificaciones
- Vibraciones MecanicasDocumento25 páginasVibraciones MecanicasDeAbreuJsgAún no hay calificaciones
- Vibraciones ingeniería civilDocumento55 páginasVibraciones ingeniería civilsea_jazzAún no hay calificaciones
- Vibraciones MecanicasDocumento7 páginasVibraciones MecanicasDracoRodriguezAún no hay calificaciones
- Dinámica Aplicada y Teoría de Control-Tarea #1Documento6 páginasDinámica Aplicada y Teoría de Control-Tarea #1Juan HawkinsAún no hay calificaciones
- VIBRACIONES MECANICAS en PDFDocumento23 páginasVIBRACIONES MECANICAS en PDFhector ibarraAún no hay calificaciones
- Sistemas de 1 Grado de LibertadDocumento3 páginasSistemas de 1 Grado de LibertadManolo ParAún no hay calificaciones
- Informe de Vibraciones-Grupo 5Documento21 páginasInforme de Vibraciones-Grupo 5Diego Alfonso Fernandez Calle50% (2)
- Vibración Forzada en Un Sistema Amortiguado Informe UNPRGDocumento31 páginasVibración Forzada en Un Sistema Amortiguado Informe UNPRGKROSKIDOCAún no hay calificaciones
- Vibraciones LibresDocumento5 páginasVibraciones Librescarlos bernardo ramirez hernandezAún no hay calificaciones
- Vibraciones forzadas y libres con amortiguamientoDocumento11 páginasVibraciones forzadas y libres con amortiguamientojoelAún no hay calificaciones
- Vibraciones mecánicas: tipos, sistemas y ecuacionesDocumento28 páginasVibraciones mecánicas: tipos, sistemas y ecuacionesJanet Casani AlfaroAún no hay calificaciones
- AMORTIGUADORES SISMICOSiiDocumento98 páginasAMORTIGUADORES SISMICOSiiJen Paul Portocarrero LeonAún no hay calificaciones
- Definicion de VibraciónDocumento4 páginasDefinicion de Vibraciónalexander palenciaAún no hay calificaciones
- s10 U4 3 Ecuaciones Vibraciones ForzadasDocumento40 páginass10 U4 3 Ecuaciones Vibraciones ForzadasJorge EsquerreAún no hay calificaciones
- Vibración libre: teoría y tipos con y sin amortiguamientoDocumento7 páginasVibración libre: teoría y tipos con y sin amortiguamientoYosmel Guevara100% (1)
- Vibraciones: qué son y tiposDocumento25 páginasVibraciones: qué son y tiposYoselin RosarioAún no hay calificaciones
- Analisis de VibracionesDocumento20 páginasAnalisis de VibracionesMafer Gonzalez SalcedoAún no hay calificaciones
- Vibración Mecánica111Documento21 páginasVibración Mecánica111brayanAún no hay calificaciones
- Tema 3. Tipos de VibracionesDocumento23 páginasTema 3. Tipos de VibracionesJuanmanuel ViverosAún no hay calificaciones
- Vibraciones MecánicasDocumento19 páginasVibraciones MecánicasJuan EscutiaAún no hay calificaciones
- Amortiguamiento estructuralDocumento5 páginasAmortiguamiento estructuralJosema PiñaAún no hay calificaciones
- Vibraciones ForzadasDocumento40 páginasVibraciones ForzadasMerlin Teran Cueva75% (4)
- Vibraciones Libre en Sistemas de Un Grado de LibertadDocumento21 páginasVibraciones Libre en Sistemas de Un Grado de LibertadJairoAún no hay calificaciones
- Oscilaciones ForzadasDocumento5 páginasOscilaciones ForzadasLuis David Orozco GarcíaAún no hay calificaciones
- Unidad 3 Vibraciones de Sistemas de Un Grado de Libertad Con Excitacion ArmonicaDocumento20 páginasUnidad 3 Vibraciones de Sistemas de Un Grado de Libertad Con Excitacion ArmonicaJesús CosLeyAún no hay calificaciones
- Vibraciones ForzadasDocumento14 páginasVibraciones ForzadasJavier Enrique Gonzalez MedinaAún no hay calificaciones
- 5.4. Matiz Modal PresentaciónDocumento20 páginas5.4. Matiz Modal PresentaciónAndrea DíazAún no hay calificaciones
- Introducción a las vibraciones: tipos, causas y ecuaciones de movimientoDocumento41 páginasIntroducción a las vibraciones: tipos, causas y ecuaciones de movimientoEdwin AlexisAún no hay calificaciones
- Introducción A La VibraciónDocumento14 páginasIntroducción A La VibraciónChica LunarAún no hay calificaciones
- Vibraciones mecánicas: conceptos claveDocumento22 páginasVibraciones mecánicas: conceptos clavejuncor94Aún no hay calificaciones
- Tarea3 DinámicaDocumento15 páginasTarea3 DinámicaOSCAR FELIX GODOS ESTRADAAún no hay calificaciones
- Vibracion ForzadaDocumento32 páginasVibracion ForzadaJesus VasquezAún no hay calificaciones
- Vibracioes y LubricacionDocumento28 páginasVibracioes y LubricacionJesus R. TafoyaAún no hay calificaciones
- Conceptos Básicos de La VibraciónDocumento16 páginasConceptos Básicos de La VibraciónrobertolpAún no hay calificaciones
- VIBRACIÓN LIBRE: PERIODO Y AMORTIGUAMIENTODocumento18 páginasVIBRACIÓN LIBRE: PERIODO Y AMORTIGUAMIENTORODI AQUINO QUISPEAún no hay calificaciones
- Investigación Vibraciones MecánicasDocumento7 páginasInvestigación Vibraciones MecánicasEunice Macias RealAún no hay calificaciones
- Vibración forzada de 1 grado de libertadDocumento11 páginasVibración forzada de 1 grado de libertadHenry Marin GasparAún no hay calificaciones
- Vibraciones LibresDocumento38 páginasVibraciones LibrespercyomarherreraAún no hay calificaciones
- Análisis de vibraciones mecánicas en sistemas de masa resorteDocumento6 páginasAnálisis de vibraciones mecánicas en sistemas de masa resorteMendoza Mamani Marvin RoynerAún no hay calificaciones
- Resolución de Ejercicios (Teoria)Documento9 páginasResolución de Ejercicios (Teoria)Luis Alejandro Neyra GomezAún no hay calificaciones
- Clase 2. Vibración Libre - ModificadoDocumento23 páginasClase 2. Vibración Libre - Modificadojuan carlos jimenezAún no hay calificaciones
- Clase 2. Vibración Libre - ModificadoDocumento23 páginasClase 2. Vibración Libre - ModificadoDIEGO CALDERÓNAún no hay calificaciones
- Grados de LibertadDocumento7 páginasGrados de LibertadJOHAN ROMERO RODRIGUEZAún no hay calificaciones
- Investigacion Unidad 3 Vibraciones de Sistemas de Un Grado de Libertad Con Excitación Armónica.Documento20 páginasInvestigacion Unidad 3 Vibraciones de Sistemas de Un Grado de Libertad Con Excitación Armónica.Jordan Azael ZamudioAún no hay calificaciones
- Trabajo de Resonancia y AmortiguadoresDocumento11 páginasTrabajo de Resonancia y AmortiguadoresFranzuat Carpio PazAún no hay calificaciones
- Vibraciones - Higiene OcupacionalDocumento24 páginasVibraciones - Higiene OcupacionalDouglas AlayónAún no hay calificaciones
- Tarea2 VibracionesMecanicasDocumento14 páginasTarea2 VibracionesMecanicasPepe SanchezAún no hay calificaciones
- Análisis dinámico estructurasDocumento15 páginasAnálisis dinámico estructurasChristopher SmithAún no hay calificaciones
- Vibraciones Armónicas ForzadasDocumento50 páginasVibraciones Armónicas ForzadasLuis'm CorreaAún no hay calificaciones
- Cuestionario 1Documento7 páginasCuestionario 1Juan Antonio Rodríguez MartinezAún no hay calificaciones
- Vibración Libre No AmortiguadaDocumento38 páginasVibración Libre No AmortiguadaVíctor MontesAún no hay calificaciones
- Vibraciones Mecánicas: Análisis de Sistemas con AmortiguaciónDocumento12 páginasVibraciones Mecánicas: Análisis de Sistemas con AmortiguaciónClarck TorresAún no hay calificaciones
- Unidad I: Cinematica de Las VibracionesDocumento9 páginasUnidad I: Cinematica de Las VibracionesDios ParawhyAún no hay calificaciones
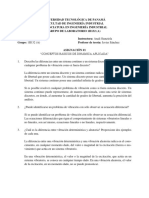
- Asig 1 - Dinamica AplicadaDocumento6 páginasAsig 1 - Dinamica AplicadakimberlyAún no hay calificaciones
- Fajas TransportadorasDocumento51 páginasFajas TransportadorasJorge TarrilloAún no hay calificaciones
- Wiac - Info PDF Fundamentos de Aire Acondicionado y Refrigeracion PRDocumento53 páginasWiac - Info PDF Fundamentos de Aire Acondicionado y Refrigeracion PRJorge TarrilloAún no hay calificaciones
- Sesion 12-2022-II - Vibración - Cimentacion y Vibración de Máquinas 01-02-2023Documento50 páginasSesion 12-2022-II - Vibración - Cimentacion y Vibración de Máquinas 01-02-2023Jorge TarrilloAún no hay calificaciones
- TARRILLO ALVA JORGE-Examen Segunda Unidad 2022-II - Estructuras Industriales-EPIMDocumento10 páginasTARRILLO ALVA JORGE-Examen Segunda Unidad 2022-II - Estructuras Industriales-EPIMJorge TarrilloAún no hay calificaciones
- Literatura 2Documento1 páginaLiteratura 2Jorge TarrilloAún no hay calificaciones
- RV 4Documento1 páginaRV 4Jorge TarrilloAún no hay calificaciones
- Arte 4Documento2 páginasArte 4Jorge TarrilloAún no hay calificaciones
- Civ 7Documento1 páginaCiv 7Jorge TarrilloAún no hay calificaciones
- Arit 7Documento1 páginaArit 7Jorge TarrilloAún no hay calificaciones
- Superficies EquipotencialesDocumento6 páginasSuperficies EquipotencialesJorge TarrilloAún no hay calificaciones
- PISTÓNDocumento1 páginaPISTÓNJorge TarrilloAún no hay calificaciones
- Superficies-Equipotenciales 2Documento10 páginasSuperficies-Equipotenciales 2Jorge TarrilloAún no hay calificaciones
- Superficies EquipotencialesDocumento6 páginasSuperficies EquipotencialesJorge TarrilloAún no hay calificaciones
- Ejemplo 1: Evaluacion AmbientalDocumento7 páginasEjemplo 1: Evaluacion AmbientalLaura RiveraAún no hay calificaciones
- Dormir PDFDocumento18 páginasDormir PDFNestor Ramos0% (5)
- T1 Sistemas Activos-Ventilación y CalefacciónDocumento146 páginasT1 Sistemas Activos-Ventilación y CalefacciónEmanuel Carril MedinaAún no hay calificaciones
- 052403-0028 - Sas NM - MonografíaDocumento24 páginas052403-0028 - Sas NM - MonografíaRoger GomezAún no hay calificaciones
- Generacion de Modelos de NegocioDocumento41 páginasGeneracion de Modelos de NegocioAlexis LupercioAún no hay calificaciones
- GGC-P10 Verificación de Balanzas V 0.6Documento4 páginasGGC-P10 Verificación de Balanzas V 0.6yonkemanAún no hay calificaciones
- Formato de Asistencia Del PersonalDocumento1 páginaFormato de Asistencia Del Personalalex lizarragaAún no hay calificaciones
- 02 Resumen EjecutivoDocumento12 páginas02 Resumen Ejecutivop.rojasc3dAún no hay calificaciones
- Onboarding SustentaciónDocumento20 páginasOnboarding SustentaciónAnitza Marie Nadramia ChacaltanaAún no hay calificaciones
- Magnitudes y vectores en FísicaDocumento16 páginasMagnitudes y vectores en FísicaYesenia Arenas100% (1)
- La Importancia Del Agua en La Industria de AlimentDocumento9 páginasLa Importancia Del Agua en La Industria de AlimentHouse DoctorAún no hay calificaciones
- Modelos de DistribucionDocumento56 páginasModelos de DistribucionTania DueñasAún no hay calificaciones
- Aplicaciones LinealesDocumento16 páginasAplicaciones LinealesHenry HAún no hay calificaciones
- Tema 1.1 ENDOCRINOLOGIA Hipertiroismo, Hipotiroidismo y Hormona Del CrecimientoDocumento7 páginasTema 1.1 ENDOCRINOLOGIA Hipertiroismo, Hipotiroidismo y Hormona Del CrecimientoOnice EguigureAún no hay calificaciones
- Casas de ApuestasDocumento9 páginasCasas de ApuestasGino Francisco Ascencio GomezAún no hay calificaciones
- Empresa NubankDocumento6 páginasEmpresa NubankJair TortoneAún no hay calificaciones
- t3 - U6 - Aguilar Miranda Laura Rosalva (Avance)Documento4 páginast3 - U6 - Aguilar Miranda Laura Rosalva (Avance)Laura Rosalva Aguilar MirandaAún no hay calificaciones
- Cationes Del Grupo IiiaDocumento4 páginasCationes Del Grupo IiiaJhoelvis ChoqueAún no hay calificaciones
- Guía Proyecto Fin de GradoDocumento5 páginasGuía Proyecto Fin de GradoDelvin NodarseAún no hay calificaciones
- 54 Perforacion DiamantinaDocumento14 páginas54 Perforacion DiamantinaJUAN DANIEL HIDALGO CASTROAún no hay calificaciones
- Estudio de Oferta y Demanda de Ambulancias y Personal PreDocumento4 páginasEstudio de Oferta y Demanda de Ambulancias y Personal PreRolando Torres AguileraAún no hay calificaciones
- SST Clase 1 - B - UCSMDocumento13 páginasSST Clase 1 - B - UCSMJoselyn ZeballosAún no hay calificaciones
- Actividad 2 Evidencia 2 TallerDocumento8 páginasActividad 2 Evidencia 2 TallerJohelis RojanoAún no hay calificaciones
- Cuestionario Seguridad FisicaDocumento5 páginasCuestionario Seguridad Fisicakeilitaa100% (1)
- Uso EPPDocumento36 páginasUso EPPMiGuelANgelInGarucaAún no hay calificaciones
- Dolor de GargantaDocumento3 páginasDolor de GargantaRuperto CahuanaAún no hay calificaciones
- Centrales Eléctricas I - Aspectos Técnicos GeneralesDocumento32 páginasCentrales Eléctricas I - Aspectos Técnicos GeneralescarlosAún no hay calificaciones
- Como Crear Una Roms Tuto 1Documento33 páginasComo Crear Una Roms Tuto 1Alfonzo Poncho LunarAún no hay calificaciones
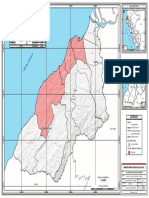
- Mapa Politico de La Region TumbesDocumento1 páginaMapa Politico de La Region Tumbesmiguel angel guaranda diosesAún no hay calificaciones
- Catalogo 2017 Digital C PDFDocumento96 páginasCatalogo 2017 Digital C PDFJoséAlfonsoRamosGonzálezAún no hay calificaciones