También podría gustarte
- Curso Electrico-Electronico 2008 - Clientes - 1Documento41 páginasCurso Electrico-Electronico 2008 - Clientes - 1Luis Pastor Alayo100% (26)
- Manual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)De EverandManual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)Calificación: 2 de 5 estrellas2/5 (1)
- Mantenimiento preventivo de sistemas de automatización industrial. ELEM0311De EverandMantenimiento preventivo de sistemas de automatización industrial. ELEM0311Calificación: 4.5 de 5 estrellas4.5/5 (2)
- Como Hackear Una Red Infinitum Con WifislaxDocumento2 páginasComo Hackear Una Red Infinitum Con WifislaxJim RogerAún no hay calificaciones
- Examen de UnemiDocumento230 páginasExamen de UnemiNESTOR ISAAC MORAN GUEVARA100% (4)
- Etapas de Un AutomatismoDocumento31 páginasEtapas de Un AutomatismoFRANCISCO ORTEGA GARZONAún no hay calificaciones
- emas de ntrol Con Plcmas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas deDocumento61 páginasemas de ntrol Con Plcmas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas dejenson100% (2)
- Sistemas de ControlDocumento47 páginasSistemas de Controlalexander_sdc100% (1)
- Mantenimiento de redes eléctricas aéreas de baja tensión. ELEE0109De EverandMantenimiento de redes eléctricas aéreas de baja tensión. ELEE0109Aún no hay calificaciones
- 1.1-Etapas de Un AutomatismoDocumento29 páginas1.1-Etapas de Un AutomatismoJesús Alejandro100% (3)
- Trabajo Lazo CerradoDocumento16 páginasTrabajo Lazo CerradochicotonyxdAún no hay calificaciones
- UF1966 - Operaciones auxiliares en el mantenimiento de equipos electrónicosDe EverandUF1966 - Operaciones auxiliares en el mantenimiento de equipos electrónicosCalificación: 5 de 5 estrellas5/5 (1)
- Lazo CerradoDocumento12 páginasLazo CerradoVictor Reyes100% (1)
- Controladores Lógicos ProgramablesDocumento36 páginasControladores Lógicos ProgramablesAngel Diaz100% (1)
- Ingeniería de Control PDFDocumento153 páginasIngeniería de Control PDFMartín de la Cruz100% (1)
- Lazo Abierto y CerradoDocumento8 páginasLazo Abierto y CerradoalexAún no hay calificaciones
- Controladores industriales PIDDocumento69 páginasControladores industriales PIDDeivid Quinde ConstanteAún no hay calificaciones
- 4 - Capacitación EARSDocumento78 páginas4 - Capacitación EARSWesley Gonzalo Yupanqui100% (1)
- Control ON/OFF de NivelDocumento21 páginasControl ON/OFF de NivelMarioly Rodriguez VidalAún no hay calificaciones
- Laboratorio de Instrumentacion y ControlDocumento16 páginasLaboratorio de Instrumentacion y ControlUriel CeballosAún no hay calificaciones
- SCI - Clase 2 - 30 MarzoDocumento27 páginasSCI - Clase 2 - 30 MarzoJavierSanchezAún no hay calificaciones
- Estructura de Un AutomatismoDocumento28 páginasEstructura de Un AutomatismoAle KeyAún no hay calificaciones
- Apuntes Ing. ControlDocumento121 páginasApuntes Ing. ControlCesar MtzAún no hay calificaciones
- Automatismos y Control Sistemas Basicos Control IndustrialDocumento21 páginasAutomatismos y Control Sistemas Basicos Control IndustrialFranc MacAún no hay calificaciones
- AutomatismoDocumento29 páginasAutomatismoJose Reynaldo GuillenAún no hay calificaciones
- Introducción A Los Sistemas de ControlDocumento61 páginasIntroducción A Los Sistemas de ControlLucas IessAún no hay calificaciones
- Control PLC S7200 de SiemensDocumento32 páginasControl PLC S7200 de SiemensLuis Alfonso Prada Leon100% (6)
- Control C1Documento31 páginasControl C1bryan stivenAún no hay calificaciones
- Capitulo 1Documento10 páginasCapitulo 1Laco tangara JhuniorAún no hay calificaciones
- 0009-Instrumentacion Industrial y Control Del ProcesoslDocumento6 páginas0009-Instrumentacion Industrial y Control Del Procesoslkeno souzaAún no hay calificaciones
- 11 Etapas de Un AutomatismoDocumento31 páginas11 Etapas de Un AutomatismoFRANCISCO ORTEGA GARZONAún no hay calificaciones
- Control AutomaticoDocumento31 páginasControl AutomaticoSerch Memo Pavon Tepox0% (1)
- Sistemas de ControlDocumento24 páginasSistemas de ControlQuintanilla Roca HectorAún no hay calificaciones
- Tipos de ControladoresDocumento8 páginasTipos de ControladoresCeleste PardoAún no hay calificaciones
- Sistemas de Control - Material TeóricoDocumento8 páginasSistemas de Control - Material TeóricoBruno WilchesAún no hay calificaciones
- Guia de Laboratorio #1 Tcontrol-EoDocumento8 páginasGuia de Laboratorio #1 Tcontrol-EoWALTER CHOQUE COPARIAún no hay calificaciones
- Control Presentacion8Documento58 páginasControl Presentacion8桜田純Aún no hay calificaciones
- Lab2.Controladores de ProcesoDocumento16 páginasLab2.Controladores de ProcesoErlita TerronesAún no hay calificaciones
- PLC-2 Lógica programadaDocumento51 páginasPLC-2 Lógica programadaestevan gutierrezAún no hay calificaciones
- Control ComputarizadoDocumento15 páginasControl Computarizadoleticiazabala0% (1)
- Control Automatico HornoDocumento31 páginasControl Automatico HornoRudy Glausser100% (1)
- Separata 1Documento63 páginasSeparata 1John Anthony Torres QuispeAún no hay calificaciones
- Qué Es Control - MergedDocumento74 páginasQué Es Control - Mergedjhon.simba2014Aún no hay calificaciones
- Teoria de Control DigitalDocumento17 páginasTeoria de Control DigitalRomanAún no hay calificaciones
- Instituto Politécnico NacionalDocumento8 páginasInstituto Politécnico NacionalFrancisco AC100% (1)
- Tema 2º. Señales Electronicas de La Electronica DieselDocumento37 páginasTema 2º. Señales Electronicas de La Electronica DieselJuan vilchez sanchezAún no hay calificaciones
- Tecnología de controlDocumento39 páginasTecnología de controlbogadogabriel523Aún no hay calificaciones
- Sistema de control de lazo cerrado para temperaturaDocumento4 páginasSistema de control de lazo cerrado para temperaturaAlexis Klinsmann PeñaAún no hay calificaciones
- Instrumentacion IndustrialDocumento22 páginasInstrumentacion IndustrialNicolas IturresAún no hay calificaciones
- Control On-Off Sistema Simple PrecisoDocumento5 páginasControl On-Off Sistema Simple PrecisoAlex MendozaAún no hay calificaciones
- 01 Resumen Automatismos2Documento4 páginas01 Resumen Automatismos2Williams FernandezAún no hay calificaciones
- Control de Temperatura Proporcional Micrologix 1000Documento13 páginasControl de Temperatura Proporcional Micrologix 1000serolfitnas100% (2)
- Control Industrial 2-3Documento123 páginasControl Industrial 2-3Luis Alejandro ZAún no hay calificaciones
- Sistemas de Control - Lazo Abierto - Lazo CerradoDocumento8 páginasSistemas de Control - Lazo Abierto - Lazo CerradojulianAún no hay calificaciones
- Electronica IIIDocumento106 páginasElectronica IIICarlos Alberto Calle PedrazaAún no hay calificaciones
- Clase 6 Identificacion Sistemas 2016 - 2Documento23 páginasClase 6 Identificacion Sistemas 2016 - 2Edwin Ancota AcoticonaAún no hay calificaciones
- Tarea 9, ControladoresDocumento14 páginasTarea 9, ControladoresAbraham ResendizAún no hay calificaciones
- 4Documento14 páginas4Rosvit De la CruzAún no hay calificaciones
- Sistemas de Regulación y ControlDocumento4 páginasSistemas de Regulación y ControlRuben GarcíaAún no hay calificaciones
- Sistemas de Control1Documento22 páginasSistemas de Control1LeopoldoPavesiAún no hay calificaciones
- TR1 Sistemas de Control - ContinuoDocumento77 páginasTR1 Sistemas de Control - ContinuoGurpreet SinghAún no hay calificaciones
- Oct 20 - Plantas de PotenciaDocumento24 páginasOct 20 - Plantas de PotenciaJavierSanchezAún no hay calificaciones
- Tema 10. Introducción Acustica RecintosDocumento24 páginasTema 10. Introducción Acustica RecintosAngel LeonardAún no hay calificaciones
- 3940 - 1IE143&1IE144 Bases MatemáticasDocumento39 páginas3940 - 1IE143&1IE144 Bases MatemáticasJavierSanchezAún no hay calificaciones
- Caso de Estudio - CopedielDocumento16 páginasCaso de Estudio - CopedielJavierSanchezAún no hay calificaciones
- JUN 15-DATC - Respuesta Transitoria - Analisis Sistemas DinamicosDocumento27 páginasJUN 15-DATC - Respuesta Transitoria - Analisis Sistemas DinamicosJavierSanchezAún no hay calificaciones
- Cap4 - Turbinas HidraulicasDocumento52 páginasCap4 - Turbinas HidraulicasJavierSanchezAún no hay calificaciones
- Modelado Sistemas - AnalogiasDocumento29 páginasModelado Sistemas - AnalogiasJavierSanchezAún no hay calificaciones
- Mayo5 - Modelado Sistema TraslacionalesDocumento11 páginasMayo5 - Modelado Sistema TraslacionalesJavierSanchezAún no hay calificaciones
- Calculos de PresiónDocumento20 páginasCalculos de PresiónJavierSanchezAún no hay calificaciones
- May 1 DaDocumento15 páginasMay 1 DaJavierSanchezAún no hay calificaciones
- Cuadros eléctricos equipos aire acondicionadoDocumento47 páginasCuadros eléctricos equipos aire acondicionadoJavierSanchezAún no hay calificaciones
- Edificio 1 planos tuberíasDocumento8 páginasEdificio 1 planos tuberíasJavierSanchezAún no hay calificaciones
- May 4-3940 - 1ie143 & 1ie44 - Modelado Sistemas TraslacionalesDocumento15 páginasMay 4-3940 - 1ie143 & 1ie44 - Modelado Sistemas TraslacionalesJavierSanchezAún no hay calificaciones
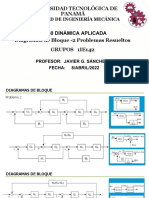
- Abr 8 - 3940 - 1ie142 - Problemas Resueltos Diagramsa de BloqueDocumento7 páginasAbr 8 - 3940 - 1ie142 - Problemas Resueltos Diagramsa de BloqueJavierSanchezAún no hay calificaciones
- Instalaciones SanitariasDocumento7 páginasInstalaciones SanitariasVictor Rene H. R.Aún no hay calificaciones
- CC24D-Sprinkler Design - Rev 01-11-2017Documento45 páginasCC24D-Sprinkler Design - Rev 01-11-2017JavierSanchezAún no hay calificaciones
- DSTF - Clase 1-2-3Documento44 páginasDSTF - Clase 1-2-3JavierSanchezAún no hay calificaciones
- 7905 - Inst. Sanitaria Conceptos BasicosDocumento6 páginas7905 - Inst. Sanitaria Conceptos BasicosJavierSanchezAún no hay calificaciones
- 7906 DSTF - Sistema Sanitario - Ago 2020Documento76 páginas7906 DSTF - Sistema Sanitario - Ago 2020JavierSanchezAún no hay calificaciones
- Javer Sanchez - A2Documento11 páginasJaver Sanchez - A2JavierSanchezAún no hay calificaciones
- Manual Aprobacion MOPDocumento135 páginasManual Aprobacion MOPVanessa ArceAún no hay calificaciones
- ManualDocumento509 páginasManualdianabernal17Aún no hay calificaciones
- Ejercicios ResueltosDocumento28 páginasEjercicios ResueltosJavierSanchezAún no hay calificaciones
- Panamá Bun-CaDocumento66 páginasPanamá Bun-CaJavierSanchezAún no hay calificaciones
- Clase 2 - Sistemas Electricos y Electronicos de Buques - MaquinasDocumento42 páginasClase 2 - Sistemas Electricos y Electronicos de Buques - MaquinasJavierSanchezAún no hay calificaciones
- 7905 - Inst. Sanitaria Conceptos BasicosDocumento6 páginas7905 - Inst. Sanitaria Conceptos BasicosJavierSanchezAún no hay calificaciones
- Clase 1 - Sistemas Electricos y Electronicos de BuquesDocumento44 páginasClase 1 - Sistemas Electricos y Electronicos de BuquesJavierSanchezAún no hay calificaciones
- Maritime Information and DWGDocumento14 páginasMaritime Information and DWGJavierSanchezAún no hay calificaciones
- Actividad 1. Infografía de Páginas WebDocumento2 páginasActividad 1. Infografía de Páginas WebPaulina GomezAún no hay calificaciones
- Mezcla de Colores CLAVEDocumento1 páginaMezcla de Colores CLAVErociel100% (1)
- Redes IPV4 PDFDocumento11 páginasRedes IPV4 PDFjose johan fabian agramonteAún no hay calificaciones
- Asignacion de ComputacionDocumento9 páginasAsignacion de ComputacionAlejandra Vanessa Marcano RomeroAún no hay calificaciones
- Herramienta OfimaticaDocumento6 páginasHerramienta OfimaticaAndrea GuzmanAún no hay calificaciones
- Modflow Presa EspañolDocumento13 páginasModflow Presa EspañolIVAN TANCARA ROJASAún no hay calificaciones
- Cap 2.pdf (F.C)Documento17 páginasCap 2.pdf (F.C)Josmerlin MoretaAún no hay calificaciones
- Examen Segundo Parcial - LaboratorioDocumento1 páginaExamen Segundo Parcial - LaboratoriofabianAún no hay calificaciones
- Informe Sobre TeletrabajoDocumento7 páginasInforme Sobre Teletrabajoestela trocelAún no hay calificaciones
- Lenguaje EnsambladorDocumento25 páginasLenguaje EnsambladorJhonnySanchezAún no hay calificaciones
- AF1 Ing - ControlDocumento8 páginasAF1 Ing - ControljavierAún no hay calificaciones
- Analizando amenazas y estrategias de supervivenciaDocumento2 páginasAnalizando amenazas y estrategias de supervivenciaSelene CastilloAún no hay calificaciones
- Clase 10.08 - Modelamiento de Procesos Con BizagiDocumento28 páginasClase 10.08 - Modelamiento de Procesos Con BizagikatyAún no hay calificaciones
- Anatomía Del Post ViralDocumento35 páginasAnatomía Del Post ViralAura BracamonteAún no hay calificaciones
- Lab 16 - Graficos Con PythonDocumento20 páginasLab 16 - Graficos Con Pythondaniel torresAún no hay calificaciones
- Acta N.PDF Reunion Virtual 4 Fondo EsperanzaDocumento2 páginasActa N.PDF Reunion Virtual 4 Fondo EsperanzaAzmabeth Césped RetamalAún no hay calificaciones
- Edd PDocumento9 páginasEdd PDámaris RojasAún no hay calificaciones
- 6º Martes 14 Evaluacion - Matematica 2021Documento9 páginas6º Martes 14 Evaluacion - Matematica 2021hectorAún no hay calificaciones
- Guia 5Documento9 páginasGuia 5Jersson Cristian Villala AlavaAún no hay calificaciones
- Windows No Puede Cargar El Perfil de UsuarioDocumento4 páginasWindows No Puede Cargar El Perfil de UsuarioraluntitledAún no hay calificaciones
- Introducción a la visualización de datos con Google Data StudioDocumento3 páginasIntroducción a la visualización de datos con Google Data StudioJesus Percy Nazario PortilaAún no hay calificaciones
- Diseño y Construcción de Un Sistema para Entrenamiento en Motores de Inyección A GasolinaDocumento22 páginasDiseño y Construcción de Un Sistema para Entrenamiento en Motores de Inyección A GasolinaGalo CárdenasAún no hay calificaciones
- Informe final inventario bienes UGEL Virú 2017Documento7 páginasInforme final inventario bienes UGEL Virú 2017Patrimonio Ugel ViruAún no hay calificaciones
- Escasez de microchips afecta industriaDocumento3 páginasEscasez de microchips afecta industriaEnrique SantiagoAún no hay calificaciones
- Cadisac Menu de Cursos de CapacitacionDocumento9 páginasCadisac Menu de Cursos de CapacitacionIsaac HernandezAún no hay calificaciones
- Actividad Entregable 01Documento4 páginasActividad Entregable 01EnriKe TorresAún no hay calificaciones
- RDSI InicioDocumento16 páginasRDSI InicioVeronica RamirezAún no hay calificaciones
- Tarea3 ColaborativoDocumento18 páginasTarea3 ColaborativoAlvaro HernandezAún no hay calificaciones