También podría gustarte
- Guia de Practicas de Aceites y GrasasDocumento44 páginasGuia de Practicas de Aceites y GrasasJhonatan Mamani CañasacaAún no hay calificaciones
- Capítulo #2 Modelado Matemático de Sistemas de ControlDocumento76 páginasCapítulo #2 Modelado Matemático de Sistemas de ControlHector Vergara100% (3)
- Transformada ZetaDocumento46 páginasTransformada ZetaAnonymous 9VQJy0cjAún no hay calificaciones
- Ser Omni 4Documento8 páginasSer Omni 4roblestolentino100% (2)
- Principios y PracticasDocumento85 páginasPrincipios y PracticasAmir Fletes EstradaAún no hay calificaciones
- S03.s1. Teoria Análisis de Respuesta TemporalDocumento10 páginasS03.s1. Teoria Análisis de Respuesta TemporalCarlos LOAún no hay calificaciones
- Fase 3 Fundamentación Teórica para El Diseño Del ProyectoDocumento7 páginasFase 3 Fundamentación Teórica para El Diseño Del ProyectoDiego GalvisAún no hay calificaciones
- Ejemplario: Ecuaciones Diferenciales OrdinariasDe EverandEjemplario: Ecuaciones Diferenciales OrdinariasAún no hay calificaciones
- Topología y geometría diferencial con aplicaciones a la físicaDe EverandTopología y geometría diferencial con aplicaciones a la físicaCalificación: 5 de 5 estrellas5/5 (1)
- PD Nemo Handy-A 1.30 SpanishDocumento20 páginasPD Nemo Handy-A 1.30 SpanishkanserAún no hay calificaciones
- Funcion de TransferenciaDocumento35 páginasFuncion de TransferenciaJosé Terán CseAún no hay calificaciones
- Felosan NFGDocumento15 páginasFelosan NFGRobin felderAún no hay calificaciones
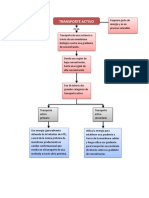
- Transporte CelularDocumento10 páginasTransporte CelularAndres UrietaAún no hay calificaciones
- Respuesta de Sistemas DinamicosDocumento46 páginasRespuesta de Sistemas DinamicosAngel arizaAún no hay calificaciones
- Unidad 01a PDFDocumento49 páginasUnidad 01a PDFKelvin MartínezAún no hay calificaciones
- Transformada ZetaDocumento46 páginasTransformada ZetaDanny Erquinio LopezAún no hay calificaciones
- Probl-1° y 2° OrdenDocumento8 páginasProbl-1° y 2° OrdenCarlos UsuaAún no hay calificaciones
- Semana 8Documento28 páginasSemana 8pathy cocreAún no hay calificaciones
- Respuesta Temporal TeoriaDocumento10 páginasRespuesta Temporal TeoriaAlexander Castillo MaytaAún no hay calificaciones
- 3 - Análisis Cuantitativo y Cualitativo de Los Sistemas de ControlDocumento45 páginas3 - Análisis Cuantitativo y Cualitativo de Los Sistemas de Controlvictor alfonso rodriguez madridAún no hay calificaciones
- Resumen SistemasDocumento74 páginasResumen Sistemasjose.bailen03Aún no hay calificaciones
- 9.1 Diagrama de Bloques y Funciones de Prueba 2017 PDFDocumento23 páginas9.1 Diagrama de Bloques y Funciones de Prueba 2017 PDFbresler_linAún no hay calificaciones
- (Tca-06) Tema 1 Representacion SistemasDocumento20 páginas(Tca-06) Tema 1 Representacion SistemasVictor Hugo Vargas MamaniAún no hay calificaciones
- Errores ESTATICO DINAMICODocumento8 páginasErrores ESTATICO DINAMICOHernin PaucaraAún no hay calificaciones
- Laboratorio 1 - Sistema de Control Digital - 01Documento19 páginasLaboratorio 1 - Sistema de Control Digital - 01Boris Benites CalenzaniAún no hay calificaciones
- C04 - Diagrama de Bloques y Respuesta TransitoriaDocumento49 páginasC04 - Diagrama de Bloques y Respuesta TransitoriaCarlos CastilloAún no hay calificaciones
- Tema2.RepresMatematicaDeLosModelos AluDocumento43 páginasTema2.RepresMatematicaDeLosModelos AluKevin arancibia calderonAún no hay calificaciones
- Laplace 2022Documento64 páginasLaplace 2022aaron solisAún no hay calificaciones
- Clase 04Documento51 páginasClase 04Giancarlo Salazar YaringañoAún no hay calificaciones
- P2 MSFDocumento2 páginasP2 MSFCarlos GonzalezAún no hay calificaciones
- Modulo 2Documento28 páginasModulo 2Diana Sofía AfanadorAún no hay calificaciones
- Análisis de Sistemas de Control en El DominioDocumento45 páginasAnálisis de Sistemas de Control en El Dominiofernando perezAún no hay calificaciones
- Practics - Procesos - 2Documento4 páginasPractics - Procesos - 2Paola de LeonAún no hay calificaciones
- Práctica1 U3 Respuesta Escalón e ImpulsoDocumento16 páginasPráctica1 U3 Respuesta Escalón e ImpulsoEdgar Aaron NavarreteAún no hay calificaciones
- Analisis de La Respuesta TemporalDocumento19 páginasAnalisis de La Respuesta Temporallewys rinconAún no hay calificaciones
- Identificacion SintonizacionDocumento64 páginasIdentificacion SintonizacionIrma Elsa Cuellar SalamancaAún no hay calificaciones
- 2.-Aula Sistemas de ControlDocumento25 páginas2.-Aula Sistemas de Controljackterzi10Aún no hay calificaciones
- Análisis y Caracterización de Los Sistemas LTI UsandoDocumento11 páginasAnálisis y Caracterización de Los Sistemas LTI UsandoMiguel CorreaAún no hay calificaciones
- Guia 5.Documento4 páginasGuia 5.Samuel RodriguezAún no hay calificaciones
- Problema de Coca-ColaDocumento32 páginasProblema de Coca-ColaAimee MizraimAún no hay calificaciones
- ANTENAS Y TELESCOPIOS Tema4 OCWDocumento29 páginasANTENAS Y TELESCOPIOS Tema4 OCWJesús SevillaAún no hay calificaciones
- CONTROL de PROCESOS Sistemas Dinamicos de Primer y Segundo OdenDocumento26 páginasCONTROL de PROCESOS Sistemas Dinamicos de Primer y Segundo OdenlinaresAún no hay calificaciones
- 7-2 Caracterizacion de Procesos de Lazo AbiertoDocumento20 páginas7-2 Caracterizacion de Procesos de Lazo AbiertosofiaAún no hay calificaciones
- ErroresDocumento6 páginasErroresEvelyn Nictte Marquez QuiinteroAún no hay calificaciones
- 13.efectos de La Realimentacion PDFDocumento6 páginas13.efectos de La Realimentacion PDFJulita Nelson GordonAún no hay calificaciones
- Guion de Clase Analisis de La Respuesta TransitoriaDocumento7 páginasGuion de Clase Analisis de La Respuesta TransitoriaAlex GoreAún no hay calificaciones
- Transformada ZDocumento45 páginasTransformada ZLuz666Aún no hay calificaciones
- Tema 6Documento36 páginasTema 6Javi Serrano VqezAún no hay calificaciones
- Acciones Basicas PIDDocumento9 páginasAcciones Basicas PIDturrubiateAún no hay calificaciones
- CONTROL DE PROCESOS - Sistemas Dinamicos de Primer y Segundo OdenDocumento26 páginasCONTROL DE PROCESOS - Sistemas Dinamicos de Primer y Segundo OdenJOSE DAVID TORRES GONZALEZAún no hay calificaciones
- Espacio de EstadosDocumento18 páginasEspacio de EstadosCristian AndradeAún no hay calificaciones
- Analisis Temporal de Sistemas DinamicosDocumento36 páginasAnalisis Temporal de Sistemas DinamicosRaul CanalesAún no hay calificaciones
- S03 (Recuperación) - Sistemas de Control DigitalDocumento38 páginasS03 (Recuperación) - Sistemas de Control DigitalJonas Huamani PumaAún no hay calificaciones
- Sistemas Dinamicos Unidad II Respuesta DDocumento14 páginasSistemas Dinamicos Unidad II Respuesta DLio DonaltyAún no hay calificaciones
- Tema3 CONTROL ÓPTIMO DE SISTEMAS DISCRETOS PDFDocumento20 páginasTema3 CONTROL ÓPTIMO DE SISTEMAS DISCRETOS PDFBlizzkAún no hay calificaciones
- Capitulo 2 Control Analogico I - 2020 - VFDocumento142 páginasCapitulo 2 Control Analogico I - 2020 - VFfraude.usicamm.cobaemAún no hay calificaciones
- Modelamiento Matemático de Un Tanque de Nivel - Funcion TransferenciaDocumento5 páginasModelamiento Matemático de Un Tanque de Nivel - Funcion TransferenciaAlberto Bardalez AricaAún no hay calificaciones
- Huacho 2007Documento185 páginasHuacho 2007miguelAún no hay calificaciones
- Quispillo 2158 Respuesta de Las Funciones de TransferenciaDocumento2 páginasQuispillo 2158 Respuesta de Las Funciones de TransferenciaLincoln MorenoAún no hay calificaciones
- Cur Lineales 2Documento18 páginasCur Lineales 2Victor Manuel Avendaño PezoAún no hay calificaciones
- Informe5-Torres-Carpio FinalDocumento17 páginasInforme5-Torres-Carpio FinalRobin felderAún no hay calificaciones
- Informe Pantalon Buzo PatronajeDocumento10 páginasInforme Pantalon Buzo PatronajeRobin felderAún no hay calificaciones
- Calendario Oficial FEDUP 2022Documento2 páginasCalendario Oficial FEDUP 2022Robin felderAún no hay calificaciones
- Qo280 CarbohidDocumento17 páginasQo280 CarbohidRobin felderAún no hay calificaciones
- Kieralon MRN Liq.cDocumento6 páginasKieralon MRN Liq.cRobin felderAún no hay calificaciones
- Ep Orga 2 Parte 1Documento1 páginaEp Orga 2 Parte 1Robin felderAún no hay calificaciones
- Sistemas de ControlDocumento58 páginasSistemas de ControlRobin felderAún no hay calificaciones
- Re Torce DoraDocumento9 páginasRe Torce DoraRobin felderAún no hay calificaciones
- CCR 5to Año - Artimetica - SB42 - Promedios PCDocumento4 páginasCCR 5to Año - Artimetica - SB42 - Promedios PCCinthyaAún no hay calificaciones
- BELLAVISTADocumento6 páginasBELLAVISTAabraham alendezAún no hay calificaciones
- ExpoDocumento7 páginasExpoAna Ma GutierrezAún no hay calificaciones
- 6ºjugando Con La Matematica - OkDocumento66 páginas6ºjugando Con La Matematica - OkMario Roberto Sacaca0% (1)
- Informe Experiencia 3 - Física Electricidad y MagnetismoDocumento14 páginasInforme Experiencia 3 - Física Electricidad y MagnetismoLib SebastianAún no hay calificaciones
- CU0415, CU0715, CU0920 Service MaunalDocumento31 páginasCU0415, CU0715, CU0920 Service Maunaljcarlos331Aún no hay calificaciones
- Curso JavascriptDocumento28 páginasCurso JavascriptDavid CrAún no hay calificaciones
- Clases-A-distancia Semana-01 Semana 1 DIDocumento28 páginasClases-A-distancia Semana-01 Semana 1 DIMarco Brenes castilloAún no hay calificaciones
- 3 GUIA La MultiplicacionDocumento11 páginas3 GUIA La MultiplicacionEnrique RosalesAún no hay calificaciones
- Automatizar Access Con C#Documento25 páginasAutomatizar Access Con C#Keelmii WoolfAún no hay calificaciones
- Ejercicios3 Calculo I Agricola 2015Documento5 páginasEjercicios3 Calculo I Agricola 2015Ingrid Alexandra Araujo PonceAún no hay calificaciones
- Unidades de Construcciones IIDocumento118 páginasUnidades de Construcciones IIromel carazas morrielAún no hay calificaciones
- RadiologíaDocumento15 páginasRadiologíaIsrael MoralesAún no hay calificaciones
- Opciones de La Barra de Estado de ExcelDocumento3 páginasOpciones de La Barra de Estado de Exceljp304Aún no hay calificaciones
- Problemario de MatematicasDocumento19 páginasProblemario de MatematicasSinaí Guerra F0% (1)
- Los Materiales y Sus PropiedadesDocumento22 páginasLos Materiales y Sus PropiedadespuertomolAún no hay calificaciones
- Capitulo III (Modo de Compatibilidad)Documento29 páginasCapitulo III (Modo de Compatibilidad)Cristóbal Vásquez QuezadaAún no hay calificaciones
- Induccion MatematicoDocumento3 páginasInduccion MatematicoJhosteing MoralesAún no hay calificaciones
- Actividad Practica No 9 ReaccionesDocumento29 páginasActividad Practica No 9 ReaccionesMagic MauroAún no hay calificaciones
- Solucion Guia QuimicaDocumento5 páginasSolucion Guia QuimicaElena RIANOS HERNANDEZAún no hay calificaciones
- Agenda CorazonesDocumento70 páginasAgenda CorazonesGabychisAún no hay calificaciones
- G.e.p.nº3 (Cinematica) 2015Documento8 páginasG.e.p.nº3 (Cinematica) 2015GabrielDehnerAún no hay calificaciones
- Experiencia 0 - V CicloDocumento10 páginasExperiencia 0 - V CicloEDUARDO SAMUEL FIGUEROA ASENCIOSAún no hay calificaciones
- S6-Resolvemos Problemas Con Ecuaciones CuadráticasDocumento11 páginasS6-Resolvemos Problemas Con Ecuaciones CuadráticasFLOR FERNANDA RONCAL ROBLESAún no hay calificaciones