CONTROLADORES ON-OFF, P,PI,PD,PID.
DISEO Y SIMULACIN
DANIEL CAMILO RUIZ 20112007065
JUAN CARLOS BARRERA 20112007052
CONTROL I
DOCENTE: PhD. ADOLFO JARAMILLO
UNIVERSIDAD DISTRITAL FRANCISCO JOS DE
CALDAS
� Qu son los controladores?
Son elementos que se le agregan al sistema
para
mejorar
sus
caractersticas
de
funcionamiento, con el objetivo de satisfacer
las especificaciones de diseo tanto en
rgimen transitorio como en estado estable.
Los elementos adicionales que se incorporan
a un sistema se hacen a manera de polos y
ceros.
�Efecto de la Adiccin de Polos y Ceros
Adicin de Polos:
Se fundamenta en la colocacin de un polo en el
origen para corregir el comportamiento de
estado estable del sistema.
Adicin de Ceros:
Se enfoca en el mejoramiento de la respuesta
transitoria.
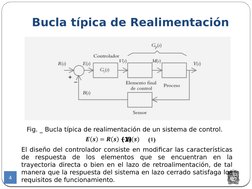
�Bucla tpica de Realimentacin
Fig. _ Bucla tpica de realimentacin de un sistema de control.
(1)
El diseo del controlador consiste en modificar las caractersticas
de respuesta de los elementos que se encuentran en la
trayectoria directa o bien en el lazo de retroalimentacin, de tal
manera que la respuesta del sistema en lazo cerrado satisfaga los
requisitos de funcionamiento.
�CRITERIOS DE DISEO
En la prctica las especificaciones requeridas a
un sistema de control se dan en trminos de
cantidades del domino del tiempo. A
continuacin se presentan las especificaciones
o parmetros de diseo ms relevantes de un
sistema a controlar:
Amortiguamiento y mximo sobreimpulso.
Tiempo
de
subida
y
tiempo
de
establecimiento.
Precisin y exactitud del sistema (Error en
estado estacionario).
5
�Respuesta temporal de un
sistema continuo
Larespuesta temporal de un sistema LTI puede
descomponerse en dos partes:
Donde:
Respuesta transitoria: Caracterstica dinmica propia del
sistema que determina el comportamiento del mismo desde
un estado inicial a uno final.
Respuesta estacionaria: Depende de la seal de
excitacin del sistema y, si el sistema estable, es la
respuesta que perdura cuando el tiempo crece infinitamente.
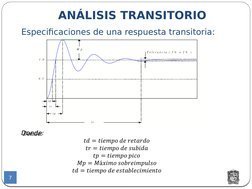
�ANLISIS TRANSITORIO
Especificaciones de una respuesta transitoria:
Donde:
�ANLISIS ESTACIONARIO
Un sistema lineal estable alcanza el rgimen o estado
estacionario cuando, al ser excitado por una seal de
entrada, la respuesta transitoria decae a cero.
Errores en estado estacionario
Presin o exactitud del sistema
El sistema de control debe seguir la seal de referencia
en estado estacionario del modo ms preciso posible. Por
esta razn, en los sistemas de control en lazo cerrado se
obtienen las expresiones de los errores de estado
estacionario de acuerdo a la siguiente clasificacin:
Segn el tipo de seal de referencia introducida
Segn el tipo de sistema
8
�
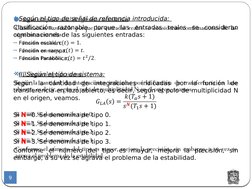
Segn el tipo de seal de referencia introducida:
Clasificacin razonable porque las entradas reales se consideran
combinaciones de las siguientes entradas:
Funcin escaln,
Funcin en rampa,
Funcin Parablica, .
II. Segn el tipo de sistema:
Segn la cantidad de integraciones indicadas por la funcin de
transferencia en lazo abierto, es decir, segn el polo de multiplicidad N
en el origen, veamos.
Si N=0. Se denomina de tipo 0.
Si N=1. Se denomina de tipo 1.
Si N=2. Se denomina de tipo 2.
Si N=3. Se denomina de tipo 3.
Conforme el nmero del tipo es mayor, mejora la precisin, sin
embargo, a su vez se agrava el problema de la estabilidad.
9
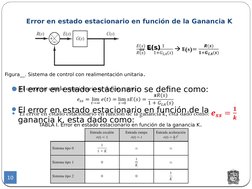
�Error en estado estacionario en funcin de la Ganancia K
E(s)
Figura__. Sistema de control con realimentacin unitaria .
El
error en estado estacionario se define como:
El error en estado estacionario en funcin de la
ganancia k, esta dado como:
TABLA I. Error en estado estacionario en funcin de la ganancia K .
10
�CONTROL PROPORCIONAL (P)
Genera
a la salida del controlador una seal que es
proporcional a la seal de error.
Con lo cual la funcin de transferencia de control
proporcional es:
Dnde:
11
�Caractersticas del control P
El
aumento de Kp permite reducir el . Cuanto mayor
es la ganancia, mayor es la seal de control generada
para un mismo valor de seal de error.
El control proporcional no aade ningn elemento
integrador al sistema, por tanto NO permite eliminar
el .
En sistemas que poseen por lo menos dos polos ms
que el nmero de ceros (que son la gran mayora de
sistemas), el aumento de la
conlleva a un
empeoramiento de la respuesta transitoria del
sistema en lazo cerrado:
Aumento del sobre impulso
Disminucin del tiempo pico
Aumento del tiempo de establecimiento
12
�EJEMPLO
Observar:
Polo en el origen, carcter
integrativo.
Especificacin de diseo:
Precisin en estado estacionario. Se impone
un y un ante una entrada del tipo rampa.
10*(0,2)=2
13
10*(0,1)=1
�14
K=0.5
K=1
Los polos en lazo cerrado del
sistema se hallaran:
Los polos en lazo cerrado del
sistema se hallaran
Considerando polos dominantes:
Considerando polos dominantes:
�K=0.5
15
K=1
�CONTROL PROPORCIONAL-DERIVATIVO (PD)
a la salida del controlador una seal que es
Genera
proporcional al error e(t), sumado a una cantidad
+
proporcional a la derivada del error.
Donde
es la ganancia del control derivativo.
Adems es un factor de proporcionalidad ajustable
que indica el tiempo de derivacin.
Al expresar la funcin del transferencia
controlador en el dominio de Laplace se obtiene:
16
del
�MTODOS DE DISEO
Primer Mtodo: Obtiene la respuesta
temporal en rgimen transitorio,
quedando el rgimen estacionario en
funcin del diseo realizado.
Segundo Mtodo: Fija una respuesta
temporal en rgimen permanente,
quedando el rgimen transitorio en funcin
del diseo realizado.
17
�EJEMPLO
Especificacin
de diseo:
Se impone al sistema unas especificaciones de
respuesta temporal transitoria:
Para cumplir las especificaciones, los polos
dominantes del sistema deben estar situados en:
18
�19