También podría gustarte
- Zaldivar-Introducción Al Álgebra LinealDocumento354 páginasZaldivar-Introducción Al Álgebra LinealJorge Daniel Moreno100% (1)
- Fisica para Videojuegos Kenny ErlebenDocumento40 páginasFisica para Videojuegos Kenny ErlebenLuis Meza100% (2)
- KioscoDocumento2 páginasKioscoMaria Paula Elgoyhen100% (1)
- INGENIO - Manual Clase 1Documento13 páginasINGENIO - Manual Clase 1juan luis GAún no hay calificaciones
- Introducción Al Álgebra Lineal - (PG 10 - 10)Documento1 páginaIntroducción Al Álgebra Lineal - (PG 10 - 10)Enrique Cabañas AloyAún no hay calificaciones
- Manual AnalisisDocumento219 páginasManual AnalisisTamaraCortésAún no hay calificaciones
- Aligeoi t10Documento42 páginasAligeoi t10Gabriel PalomaresAún no hay calificaciones
- Me Can I Quedes Fluid EsDocumento254 páginasMe Can I Quedes Fluid EsKahina DahmaniAún no hay calificaciones
- Capítulo 3 Síntesis Gráfi Ca de Eslabonamientos - . - . - . - . - . - . - . - . - . - . 87Documento1 páginaCapítulo 3 Síntesis Gráfi Ca de Eslabonamientos - . - . - . - . - . - . - . - . - . - . 87YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- MainDocumento278 páginasMainLautaro GomezAún no hay calificaciones
- Calculo Integral de Varias Variables - Javier Paez CardenasDocumento309 páginasCalculo Integral de Varias Variables - Javier Paez CardenasMartinoli GracíaAún no hay calificaciones
- Matematica DecimoDocumento165 páginasMatematica DecimoMauricio Ramirez Herrera100% (1)
- Algebra v2 PDFDocumento171 páginasAlgebra v2 PDFHeidy Lino DuranAún no hay calificaciones
- Libro Decimo 2014Documento328 páginasLibro Decimo 2014mauramzAún no hay calificaciones
- Libro de Matemáticas I Con Contenido de Aritmetica .Documento488 páginasLibro de Matemáticas I Con Contenido de Aritmetica .José Juber Balan100% (3)
- Circuitos Eléctricos Teoría y Práctica - (PG 7 - 7)Documento1 páginaCircuitos Eléctricos Teoría y Práctica - (PG 7 - 7)yaser takeshi curasma muñozAún no hay calificaciones
- Geometría Vectorial y Analítica - CHUNGDocumento546 páginasGeometría Vectorial y Analítica - CHUNGJavier Emiliano Tincopa CorcueraAún no hay calificaciones
- Calculo Integral de Varias VariablesDocumento300 páginasCalculo Integral de Varias VariablesDeanGiraffeMaster288Aún no hay calificaciones
- Carlos Ivorra CastilloDocumento534 páginasCarlos Ivorra CastilloAlan David Racines CasierraAún no hay calificaciones
- Calculo IDocumento267 páginasCalculo IFernando Cubillo CascanteAún no hay calificaciones
- Notas 2023Documento231 páginasNotas 2023Facundo EstradaAún no hay calificaciones
- Logica 2Documento582 páginasLogica 2SERGIO MARQUEZAún no hay calificaciones
- Mecanica 2 PDFDocumento350 páginasMecanica 2 PDFOscar PadillaAún no hay calificaciones
- (Apuntes Pelao) Mecanica 2Documento350 páginas(Apuntes Pelao) Mecanica 2Pablo FernandezAún no hay calificaciones
- Algebra LinealDocumento238 páginasAlgebra LinealLLHAún no hay calificaciones
- Algebra Lineal I Victor Osorio CompressDocumento188 páginasAlgebra Lineal I Victor Osorio Compresssttudy.maliAún no hay calificaciones
- Libro de Algebra Lineal-1Documento495 páginasLibro de Algebra Lineal-1Miguel Fernando Gutierrez BenitezAún no hay calificaciones
- Algebra Lineal IIDocumento403 páginasAlgebra Lineal IIAlvaroAún no hay calificaciones
- Matematicas I PDFDocumento462 páginasMatematicas I PDFrosanueva41Aún no hay calificaciones
- Manual AnalisisDocumento388 páginasManual AnalisisJuan GarciaAún no hay calificaciones
- Teoria de Maquinas Alejo Avello PDFDocumento368 páginasTeoria de Maquinas Alejo Avello PDFJesus Jose Saltaren FAún no hay calificaciones
- Matematicas I PDFDocumento488 páginasMatematicas I PDFzxcvuno4307Aún no hay calificaciones
- Introducción A La FísicaDocumento182 páginasIntroducción A La FísicaCarla Sofia ArfanottiAún no hay calificaciones
- CK 12 Algebra I Edicion Espanola PDFDocumento957 páginasCK 12 Algebra I Edicion Espanola PDFSabina QuintoAún no hay calificaciones
- Ecuaciones Diferenciales OrdinariasDocumento210 páginasEcuaciones Diferenciales Ordinariasarturo07965Aún no hay calificaciones
- CuadernilloDocumento143 páginasCuadernilloanahi TorresAún no hay calificaciones
- Texto Apoyo FMM033Documento271 páginasTexto Apoyo FMM033VIVIANA SEPÚLVEDAAún no hay calificaciones
- Notas Transformadas de Integrales1Documento47 páginasNotas Transformadas de Integrales1Victor Manuel Castillo LopezAún no hay calificaciones
- Mecanica 2Documento351 páginasMecanica 2ÓscarAún no hay calificaciones
- Libro Variable FIMEEDocumento406 páginasLibro Variable FIMEEAndres Mauricio100% (1)
- MN2007VF2 PDFDocumento251 páginasMN2007VF2 PDFCristian DiazAún no hay calificaciones
- Bernardoacevedofrias Algebra LinealDocumento242 páginasBernardoacevedofrias Algebra LinealIris Barra SassoAún no hay calificaciones
- Ecuaciones Diferenciales Ordinarias Universidad Del Norte CompressDocumento181 páginasEcuaciones Diferenciales Ordinarias Universidad Del Norte CompressDeLa Zunrise RiveraAún no hay calificaciones
- Guía Algebra Lineal Jorge CamposDocumento208 páginasGuía Algebra Lineal Jorge CamposFélix Hernández100% (2)
- Construccion Drone CuadratorDocumento183 páginasConstruccion Drone Cuadratoroscman100% (1)
- Apuntes 2022Documento69 páginasApuntes 2022Fernando HornasAún no hay calificaciones
- Libro 2017 A5Documento268 páginasLibro 2017 A5jldelafuenteAún no hay calificaciones
- Discreta 1 TeoriaDocumento182 páginasDiscreta 1 TeoriaMeredith GreyAún no hay calificaciones
- Ecuaciones diferenciales ordinarias: Una introducciónDe EverandEcuaciones diferenciales ordinarias: Una introducciónAún no hay calificaciones
- Ecuaciones diferenciales para estudiantes de Ciencias e IngenieríasDe EverandEcuaciones diferenciales para estudiantes de Ciencias e IngenieríasAún no hay calificaciones
- Matemáticas financieras empresariales - 2da ediciónDe EverandMatemáticas financieras empresariales - 2da ediciónAún no hay calificaciones
- Álgebra moderna e introducción al álgebra geométricaDe EverandÁlgebra moderna e introducción al álgebra geométricaAún no hay calificaciones
- Álgebra lineal aplicada a las ciencias económicas 2edDe EverandÁlgebra lineal aplicada a las ciencias económicas 2edCalificación: 4 de 5 estrellas4/5 (1)
- Estadística multivariada: inferencia y métodosDe EverandEstadística multivariada: inferencia y métodosAún no hay calificaciones
- F. Agüera, F.J. Aguilar, F. Carvajal, M.A. Aguilar, B. NavarroDocumento1 páginaF. Agüera, F.J. Aguilar, F. Carvajal, M.A. Aguilar, B. NavarroYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- O L L L L L L L L L L L O A A B B D D W: Capítulo 2 Fundamentos de Cinemática 33Documento1 páginaO L L L L L L L L L L L O A A B B D D W: Capítulo 2 Fundamentos de Cinemática 33YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- F. Agüera, F.J. Aguilar, F. Carvajal, M.A. Aguilar, B. NavarroDocumento1 páginaF. Agüera, F.J. Aguilar, F. Carvajal, M.A. Aguilar, B. NavarroYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- F. Agüera, F.J. Aguilar, F. Carvajal, M.A. Aguilar, B. NavarroDocumento1 páginaF. Agüera, F.J. Aguilar, F. Carvajal, M.A. Aguilar, B. NavarroYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- 255Documento1 página255YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Preliminares - Indd XVII Preliminares - Indd XVII 1/29/09 6:36:04 PM 1/29/09 6:36:04 PMDocumento1 páginaPreliminares - Indd XVII Preliminares - Indd XVII 1/29/09 6:36:04 PM 1/29/09 6:36:04 PMYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- 083Documento1 página083YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- 145Documento1 página145YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
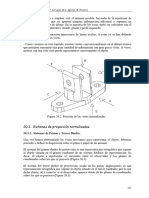
- Módulo Volumétrico: Figura 2.70 Estado de Esfuerzos Figura 2.69 Una Barra en TensiónDocumento1 páginaMódulo Volumétrico: Figura 2.70 Estado de Esfuerzos Figura 2.69 Una Barra en TensiónYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- . De manera que (σ) .32 .415 (0.961) / (1 (0.885) ) : 750 Capítulo 14 Engranes rectos y helicoidalesDocumento1 página. De manera que (σ) .32 .415 (0.961) / (1 (0.885) ) : 750 Capítulo 14 Engranes rectos y helicoidalesYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
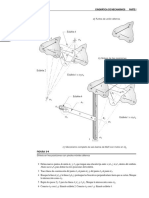
- A) Inversión Número 1 B) Inversión Número 2 C) Inversión Número 3 D) Inversión Número 4Documento1 páginaA) Inversión Número 1 B) Inversión Número 2 C) Inversión Número 3 D) Inversión Número 4YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- ' en Una Dirección Que Forma Un Ángulo de 45° Con El Eje de La CarDocumento1 página' en Una Dirección Que Forma Un Ángulo de 45° Con El Eje de La CarYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Límite Elástico y Deformación Plástica: Figura 2.62 Capa de MaterialDocumento1 páginaLímite Elástico y Deformación Plástica: Figura 2.62 Capa de MaterialYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- 125Documento1 página125YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Barras de Watt Cuya Primera Etapa Es de Grashof Como Se Muestra en La Fi Gura 3-7b. Por Lo Tanto, SeDocumento1 páginaBarras de Watt Cuya Primera Etapa Es de Grashof Como Se Muestra en La Fi Gura 3-7b. Por Lo Tanto, SeYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Problemas: B) Diámetro CDDocumento1 páginaProblemas: B) Diámetro CDYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Figura P2.68: Capítulo 16 Movimiento Plano de Cuerpos Rígidos: Fuerzas y AceleracionesDocumento1 páginaFigura P2.68: Capítulo 16 Movimiento Plano de Cuerpos Rígidos: Fuerzas y AceleracionesYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- A) El Cambio de Longitud de La Tubería, B) El Cambio en Su Diámetro Exterior, C) El Cambio en Su Espesor de ParedDocumento1 páginaA) El Cambio de Longitud de La Tubería, B) El Cambio en Su Diámetro Exterior, C) El Cambio en Su Espesor de ParedYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Ejemplo 3-3: Problema: C D D SoluciónDocumento1 páginaEjemplo 3-3: Problema: C D D SoluciónYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- 100 Cinemática de Mecanismos Parte I: A) Puntos de Unión AlternosDocumento1 página100 Cinemática de Mecanismos Parte I: A) Puntos de Unión AlternosYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- A) Localización Del Rotopolo en El Ejemplo 3-2Documento1 páginaA) Localización Del Rotopolo en El Ejemplo 3-2YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Capítulo 3 Síntesis Gráfica de Eslabonamientos 101Documento1 páginaCapítulo 3 Síntesis Gráfica de Eslabonamientos 101YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Capítulo 3 Síntesis Gráfica de Eslabonamientos 97: Ejemplo 3-4Documento1 páginaCapítulo 3 Síntesis Gráfica de Eslabonamientos 97: Ejemplo 3-4YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- 093Documento1 página093YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- 128Documento1 página128YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- 096Documento1 página096YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- 098Documento1 página098YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- 097Documento1 página097YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- 094Documento1 página094YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Fosnova Led CatalegDocumento418 páginasFosnova Led Cataleglada1119Aún no hay calificaciones
- E.jcalcivar@sangregorio - Edu.ec Lczambrano@sangregorio - Edu.ecDocumento22 páginasE.jcalcivar@sangregorio - Edu.ec Lczambrano@sangregorio - Edu.ecFabiola ParedesAún no hay calificaciones
- GUÍA DE APRENDIZAJE LENGUAJE Y COMUNICACIÓN 5° GrineldoDocumento3 páginasGUÍA DE APRENDIZAJE LENGUAJE Y COMUNICACIÓN 5° GrineldonathaliemiliaAún no hay calificaciones
- GULJ730712HCSZPN05Documento4 páginasGULJ730712HCSZPN05FranciscoAún no hay calificaciones
- Circuito de Disparo Por Desfasador RCDocumento5 páginasCircuito de Disparo Por Desfasador RCDiego ValleAún no hay calificaciones
- Teorias de MotivacionDocumento6 páginasTeorias de MotivacionLeslie Montes GomezAún no hay calificaciones
- De La Marginalidad A La Desigualdad Un Asunto de Respeto y Bienestar en América Latina-2017Documento13 páginasDe La Marginalidad A La Desigualdad Un Asunto de Respeto y Bienestar en América Latina-2017Gerda WarnholtzAún no hay calificaciones
- Tesis MarceloDocumento98 páginasTesis MarceloMelisa TavarezAún no hay calificaciones
- 3 Tasacion InmobiliariaDocumento40 páginas3 Tasacion InmobiliariaAdriana Davila Soracco0% (1)
- M4.4.3.2.2 - Sagrario Martinez RuizDocumento1 páginaM4.4.3.2.2 - Sagrario Martinez RuizSagrario Martinez RuizAún no hay calificaciones
- Libro de Actividades 5to Grado Multiplos y DivisoresDocumento2 páginasLibro de Actividades 5to Grado Multiplos y DivisoresendermeleanAún no hay calificaciones
- Iv S3 Fichas Reforzamiento Comu y MateDocumento27 páginasIv S3 Fichas Reforzamiento Comu y MateKIARA V.Aún no hay calificaciones
- Informe Final 2-Labo. Electrónicos Ii: Configuración DarlingtonDocumento2 páginasInforme Final 2-Labo. Electrónicos Ii: Configuración DarlingtonLuis Misiyauri GutiérrezAún no hay calificaciones
- Cuadro Comparativo - Revolución IndustrialDocumento2 páginasCuadro Comparativo - Revolución Industrialfabiana CastañedaAún no hay calificaciones
- Valery, Filosofía de La DanzaDocumento17 páginasValery, Filosofía de La DanzaAlejandra Trejo-Poo100% (1)
- Diptico Del Calentamiento GlobalDocumento2 páginasDiptico Del Calentamiento GlobalNikol Gutierrez chumbiAún no hay calificaciones
- Reglamento de Experiencias Formativas en Situaciones Reales de TrabajoDocumento23 páginasReglamento de Experiencias Formativas en Situaciones Reales de TrabajodmazuelosAún no hay calificaciones
- Desarrollo Cultural y TecnologicaDocumento8 páginasDesarrollo Cultural y TecnologicaIsrael MarcialAún no hay calificaciones
- Lista de Verificación de TMERTDocumento2 páginasLista de Verificación de TMERTCarol Denisse Ossandón PérezAún no hay calificaciones
- Trabajo Final de Pruebas Psicologicas 2Documento11 páginasTrabajo Final de Pruebas Psicologicas 2Jeanpaul LlutariAún no hay calificaciones
- Semana 12 PDFDocumento5 páginasSemana 12 PDFJhonnie J. EnríquezAún no hay calificaciones
- Cuadernillo de Repaso de Algebra Grado OctavoDocumento13 páginasCuadernillo de Repaso de Algebra Grado OctavoJohn Jairo Colorado MuñozAún no hay calificaciones
- Practica 2 Tecnología EléctricaDocumento9 páginasPractica 2 Tecnología EléctricaPlutonioAún no hay calificaciones
- Siete Ensayos Sobre Walter Benj - Beatriz Sarlo PDFDocumento96 páginasSiete Ensayos Sobre Walter Benj - Beatriz Sarlo PDFFernando Marturet100% (1)
- 1223333Documento1 página1223333Via SajaAún no hay calificaciones
- Ficha Andina Gabriel IllescasDocumento1 páginaFicha Andina Gabriel IllescasAmhed TorricoAún no hay calificaciones
- Ejercicios Clase - TCDocumento4 páginasEjercicios Clase - TCAlfredo VillaAún no hay calificaciones
- Planificación Matematicas para Grado Sexto Jijijij.Documento16 páginasPlanificación Matematicas para Grado Sexto Jijijij.Julian RamosAún no hay calificaciones